







一、频率响应与滤波器
对于一个正常工作的线性时不变系统而言,通过正弦信号时,输入与输出的信号频率相同。
假设输入信号为:
,其中
表示输入的振幅,
表示输入相位。
则输出为:
,对于的振幅和相位则为输出值。
而振幅响应:
幅角响应:
频率响应实际上是稳态的响应,当处于稳态时,有:
其中:
在复平面内,以及
的表达式如图

将后式的代数代入前式中,得到:
化简得:
重点结论:
, 其中
,其中
Eg:
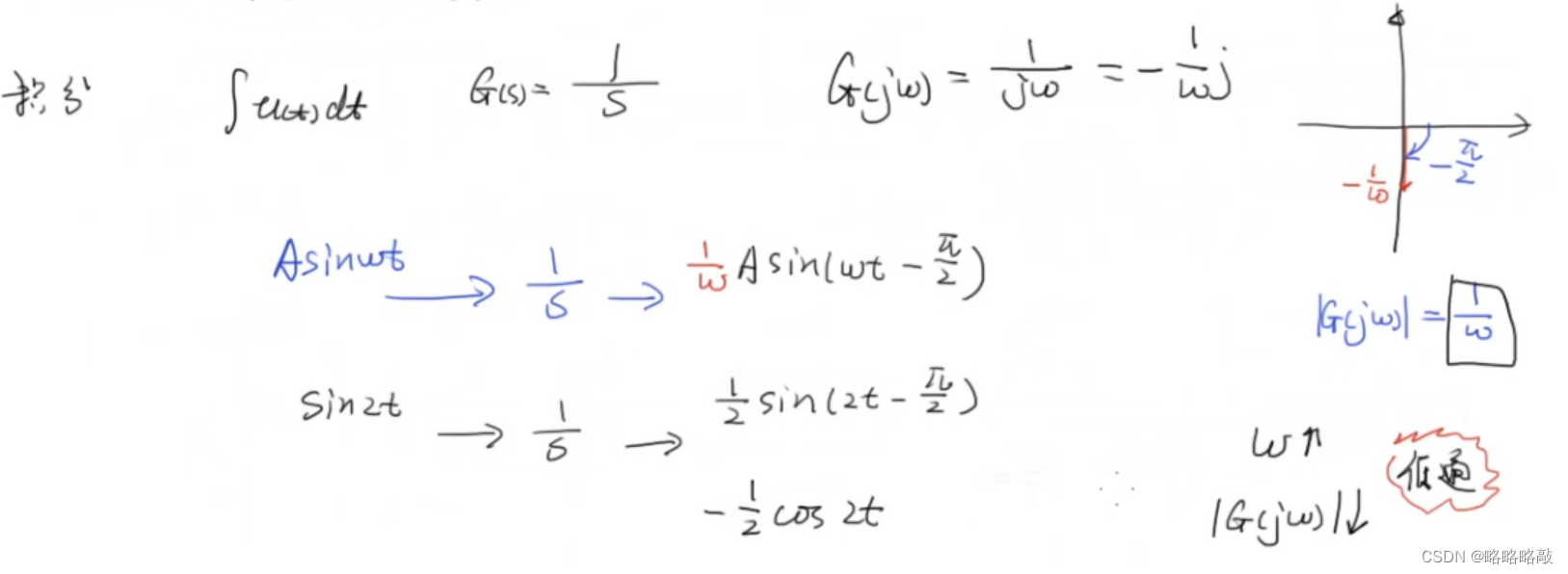
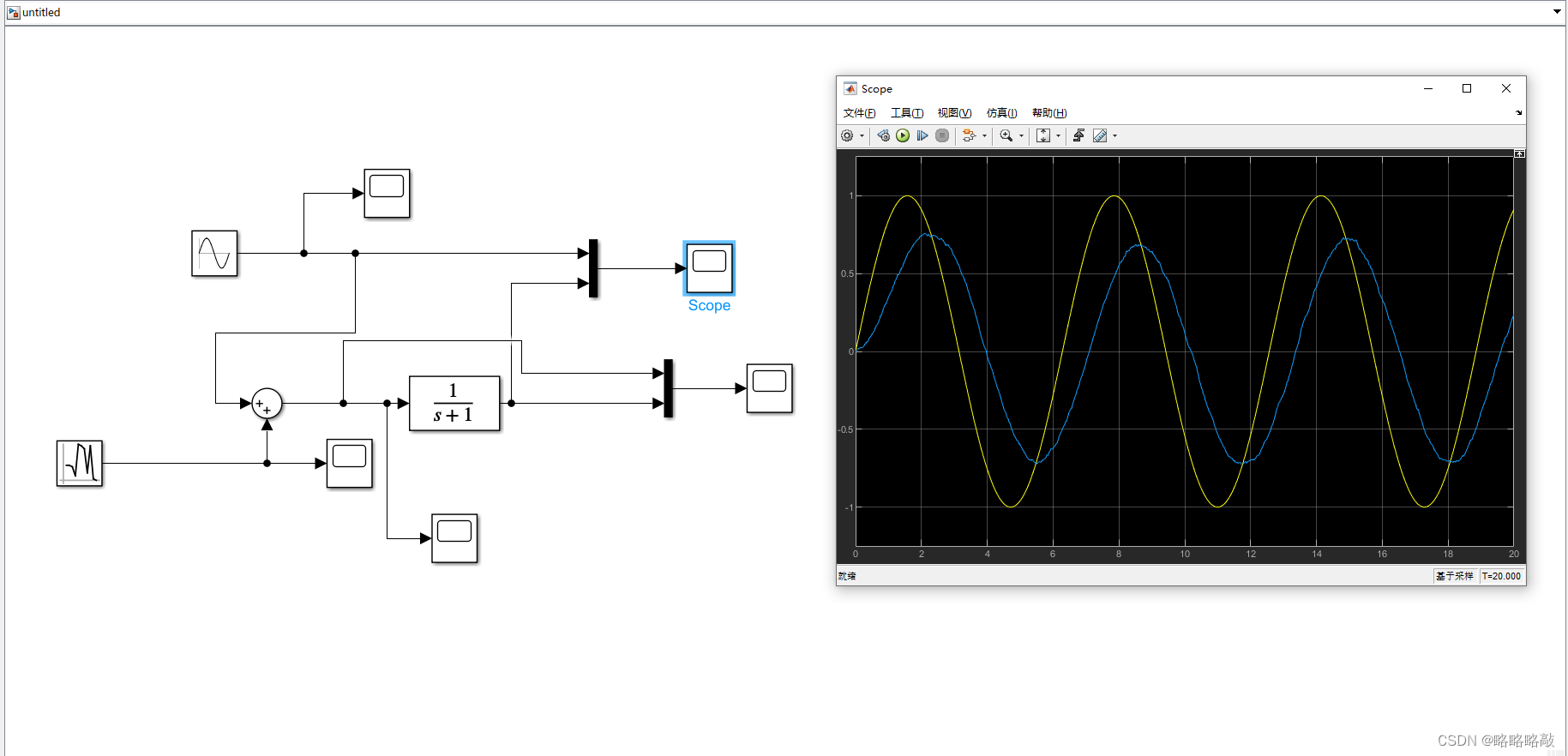
低通滤波器:
像温度、流体、电容个角度来说,都是低通滤波模型

Simulink: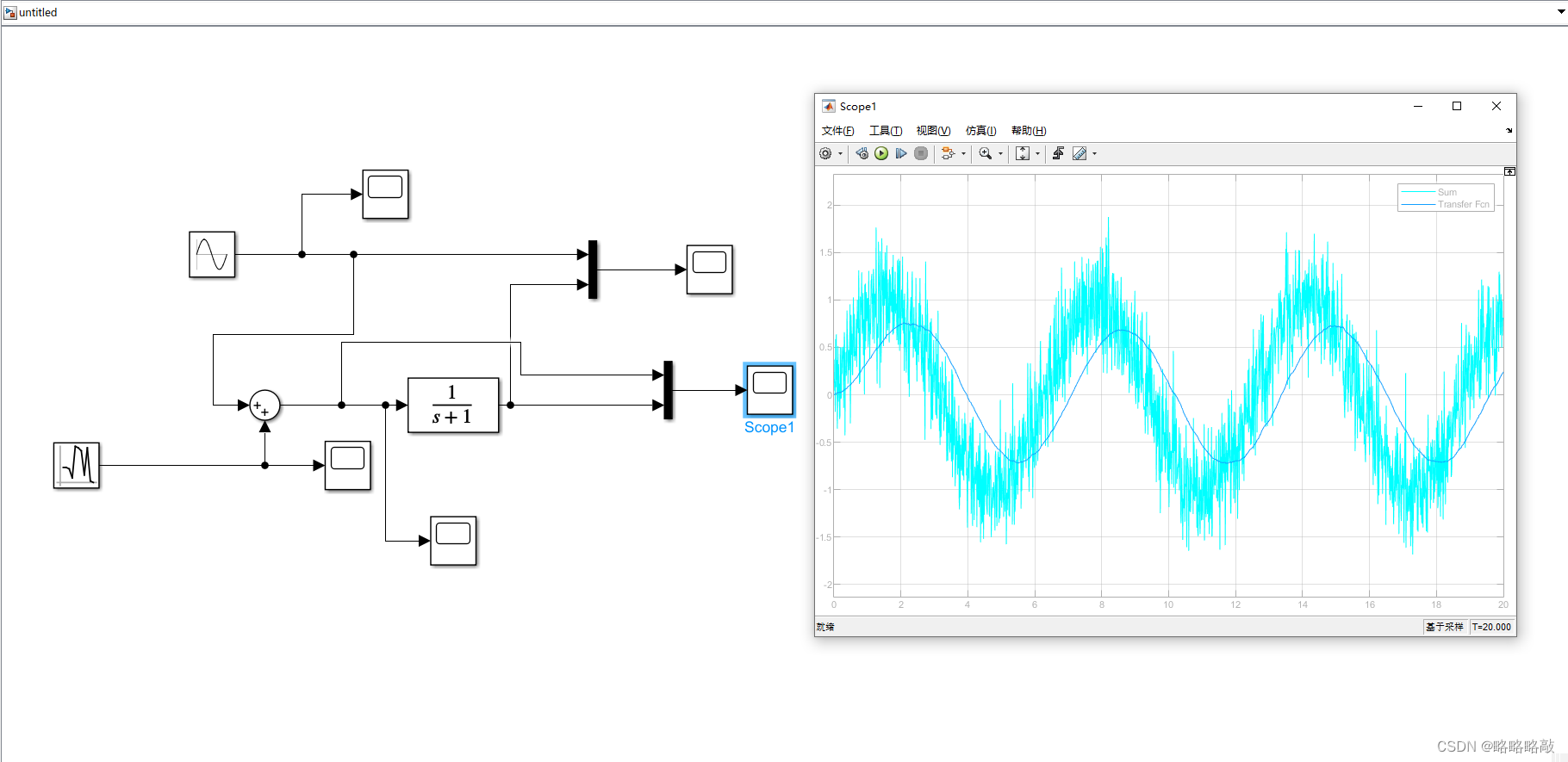















 162
162











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









