






基于扰动观测器的永磁同步电机(PMSM)模型预测控制(MPC)仿真
速度外环基于模型预测控制、电流内环基于无差拍控制搭建,控制效果理想,模块程序设计通俗易通

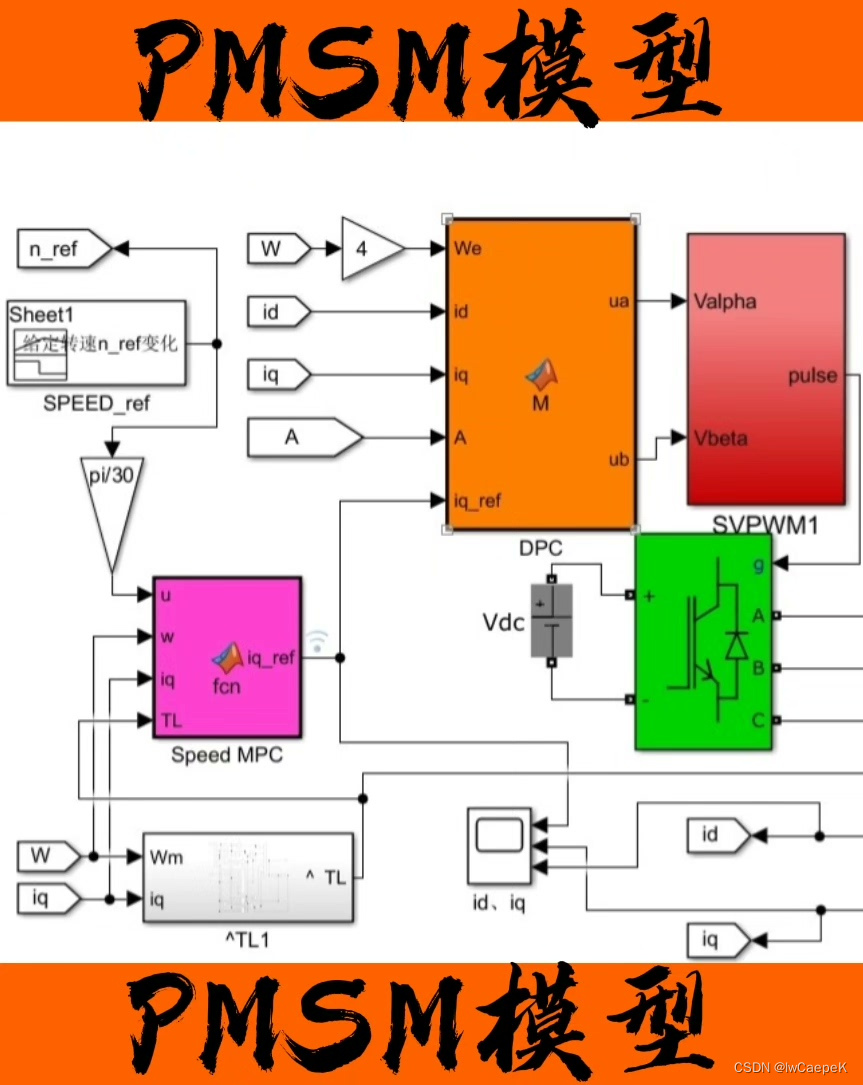
基于扰动观测器的永磁同步电机(PMSM)模型预测控制(MPC)是一种高效且精确的控制方法。本文将从速度外环和电流内环两个方面详细介绍PMSM的MPC控制策略,并通过仿真实验验证其控制效果。
首先,我们将重点关注速度外环的控制策略。在PMSM的模型预测控制中,速度外环起到了关键的作用。它通过对电机的速度进行预测,并根据预测结果进行控制,实现对电机转速的精确控制。为了提高控制效果,我们采用了扰动观测器的方法。扰动观测器能够对电机的扰动进行实时观测和补偿,从而提高了控制系统的稳定性和精度。同时,速度外环的程序设计通俗易懂,便于工程师的实际应用。
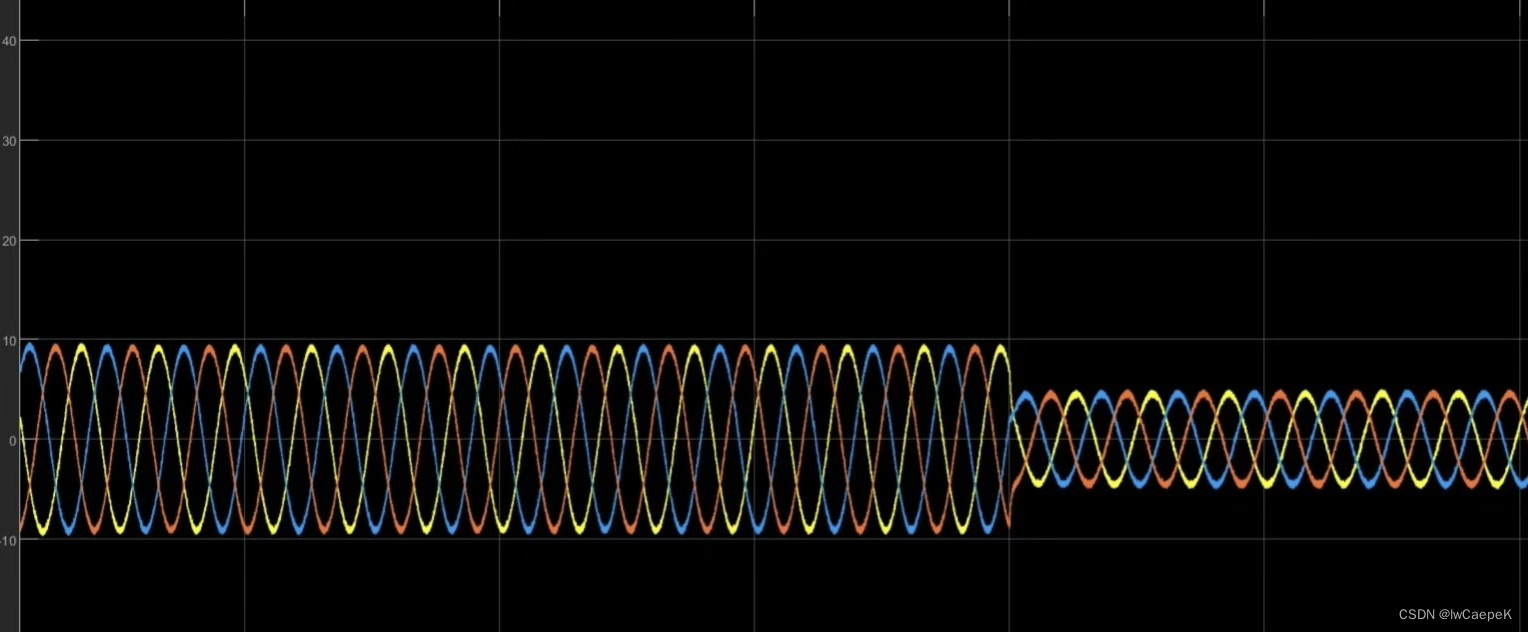
其次,我们介绍了电流内环的控制策略。在PMSM的MPC控制中,电流内环起到了辅助控制的作用。通过对电机的电流进行精确控制,可以最大限度地提高其运行效率和稳定性。为了实现无差拍控制,我们采用了先进的算法和技术。这种控制策略可以消除电机电流的大幅波动,使得PMSM在高速运行时也能够保持较低的能耗和噪音。
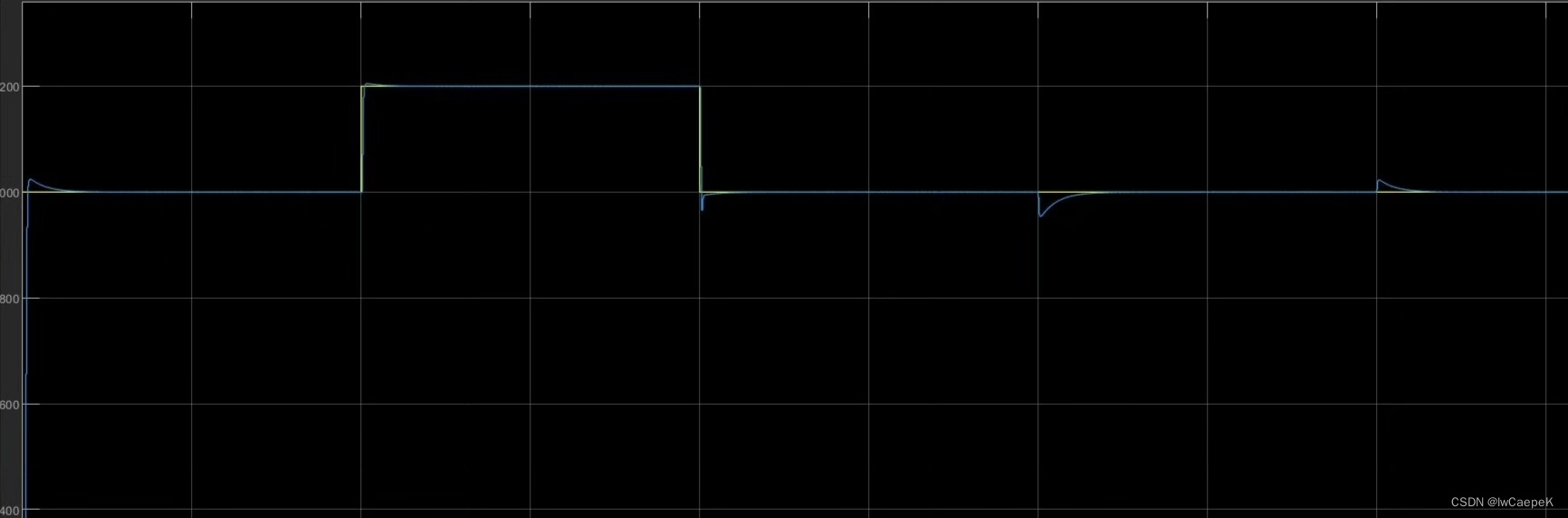
通过对PMSM的MPC控制策略的仿真实验,我们得出了如下结论:基于扰动观测器的永磁同步电机模型预测控制能够实现对电机速度的精确控制,控制效果理想。此外,该控制策略的程序设计通俗易懂,便于工程师的实际应用。同时,在电流内环方面,无差拍控制策略能够有效消除电流的波动,提高电机的运行效率和稳定性。
综上所述,基于扰动观测器的永磁同步电机模型预测控制是一种高效且精确的控制策略。通过对速度外环和电流内环的控制,可以实现对PMSM的精确控制,提高其运行效率和稳定性。该控制策略的程序设计简单易懂,便于工程师的实际应用。因此,基于扰动观测器的永磁同步电机模型预测控制有着广泛的应用前景,并值得工程师们深入研究和应用。
相关代码,程序地址:http://imgcs.cn/lanzoun/755814107200.html














 393
393











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









