







引言
在自动控制系统中,PID(比例-积分-微分)控制器被广泛用于调节各种工业过程。为了使 PID 控制器达到最佳的控制效果,需要对其参数进行调节。Ziegler-Nichols 闭环法是一种经典的 PID 参数整定方法,它通过实验性的方法帮助工程师快速找到合理的 PID 参数。本文将详细介绍 Ziegler-Nichols 闭环法的原理、步骤和应用。
1 Ziegler-Nichols 闭环法的原理
Ziegler-Nichols 闭环法是一种基于反馈系统的参数整定方法。其核心思想是通过引入反馈并逐步增加比例增益(Kp),直到系统达到临界振荡状态(即系统开始连续振荡但不稳定),然后根据这个临界振荡参数来计算合适的 PID 参数。
2 Ziegler-Nichols 闭环法的步骤
2.1 建立闭环系统
首先,将 PID 控制器接入到需要控制的系统中,形成一个闭环控制系统。这意味着传感器、控制器和执行器之间形成了一个反馈回路。
2.2关闭积分和微分作用
在开始整定之前,将 PID 控制器的积分(Ki)和微分(Kd)作用关闭,只保留比例作用(Kp)。这可以通过将 Ki 和 Kd 设为零来实现。
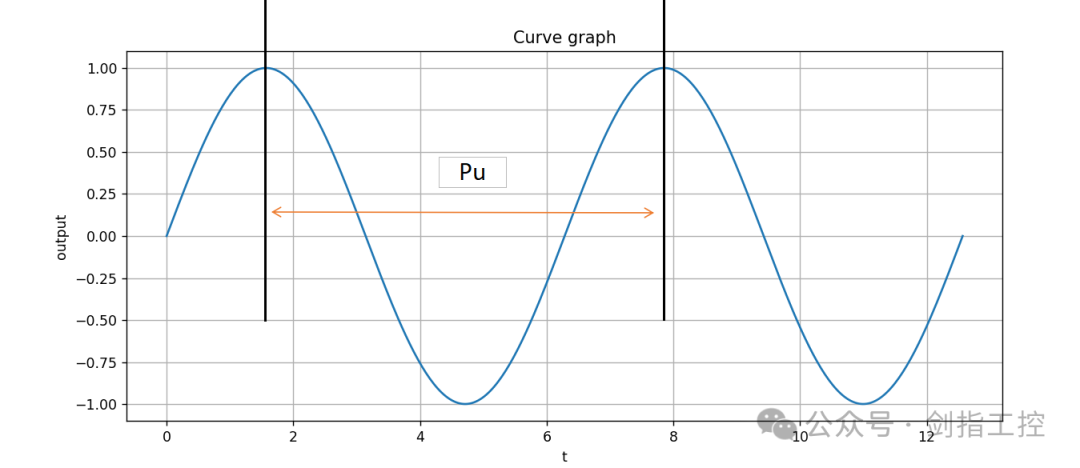
2.3 增加比例增益
从较小的比例增益(Kp)开始,逐步增加 Kp,观察系统的响应。逐步增加 Kp,直到系统输出开始产生持续的、稳定的振荡。此时记录下这个临界比例增益(Ku)和振荡周期(Pu)。
2.4 计算 PID 参数
根据 Ziegler-Nichols 的经验公式,使用 Ku 和 Pu 计算适合系统的 PID 参数:
P 控制器:
Kp = 0.5 * Ku
PI 控制器:
Kp = 0.45 * Ku
Ki = 1.2 * Kp / Pu
PID 控制器:
Kp = 0.6 * Ku
Ki = 2 * Kp / Pu
Kd = Kp * Pu / 8
这些公式是基于经验得出的,能够为大多数系统提供一个较好的初始参数。
3 应用示例
假设我们有一个温度控制系统,在实验中我们找到 Ku 为 4,Pu 为 2 秒。根据 Ziegler-Nichols 闭环法,计算 PID 参数如下:
对于 P 控制器:
Kp = 0.5 * 4 = 2
对于 PI 控制器:
Kp = 0.45 * 4 = 1.8
Ki = 1.2 * 1.8 / 2 = 1.08
对于 PID 控制器:
Kp = 0.6 * 4 = 2.4
Ki = 2 * 2.4 / 2 = 2.4
Kd = 2.4 * 2 / 8 = 0.6
这些参数可以作为控制器的初始设置,然后根据实际系统的响应进行微调。
4 优缺点分析
4.1 优点
简单易行:Ziegler-Nichols 闭环法无需复杂的数学建模,只需通过实验即可获得 PID 参数。
快速:通过几次实验即可找到初步的参数设置,节省时间。
4.2 缺点
不精确:该方法基于经验公式,对于某些复杂或非线性系统,可能无法提供最佳参数。
可能不稳定:在某些系统中,达到临界振荡状态可能会引起不稳定,甚至损坏设备。
结论
Ziegler-Nichols 闭环法是 PID 控制器参数整定的经典方法,通过实验性的方法帮助工程师快速找到合理的 PID 参数。尽管它有一定的局限性,但在实际工程应用中,依然是一个非常有价值的工具。通过理解其原理和掌握其步骤,可以有效地调节控制系统,提高系统的性能和稳定性。
希望这篇文章能帮助你更好地理解和应用 Ziegler-Nichols 闭环法。
来源:PID 参数不会调?试试 Ziegler-Nichols 实验法
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧
推荐阅读
【3】CPU中的程序是怎么运行起来的 必读

















 2336
2336

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









