







网络结构
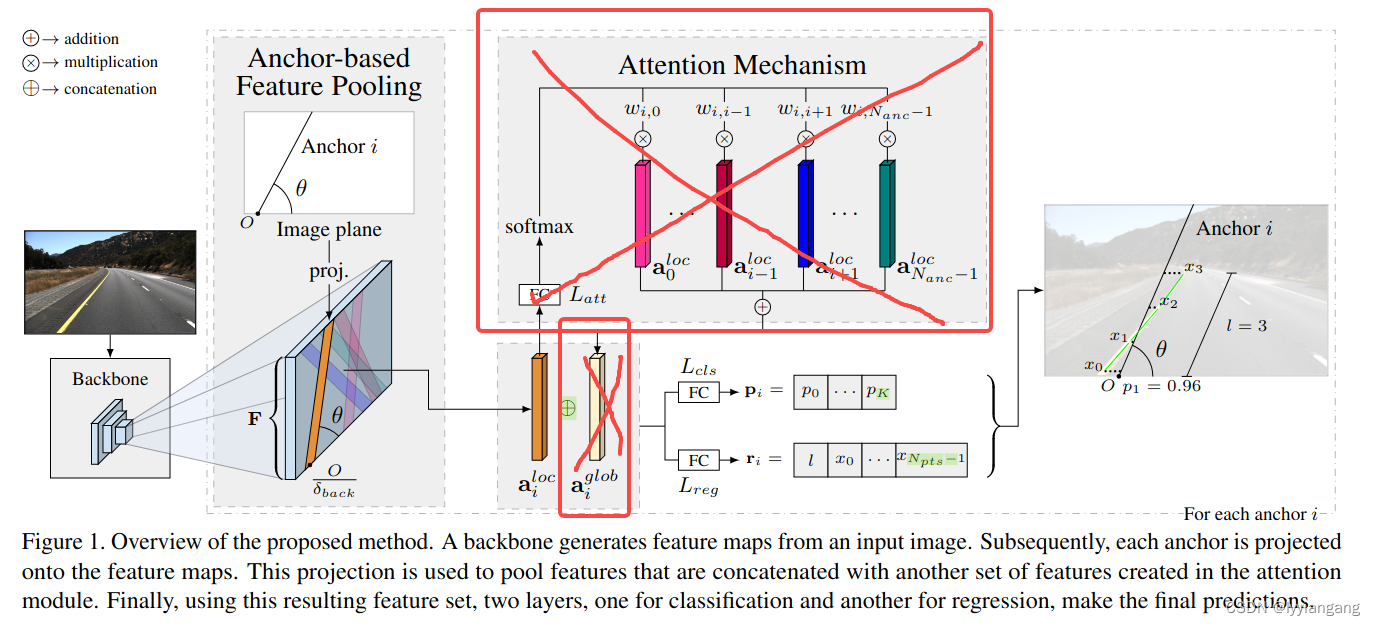
简化下网络结构可能更容易理解。
如下图,先不考虑Attention模块(去除红框中的模块),那么这个检测网络其实就是一个双头的网络,一个头分类(代码里2分类),分辨出当前anchor是否预测到了车道线,另一个回归,回归出点离anchor 直线的x方向距离,N_points为图像高度H方向的划分个数,对应代码里的n_offset或者配置中的S(72)。l则为有效offset的个数,毕竟图像上半部分基本都没车道线,通过l则可以丢弃掉无用的点。
anchor的定义
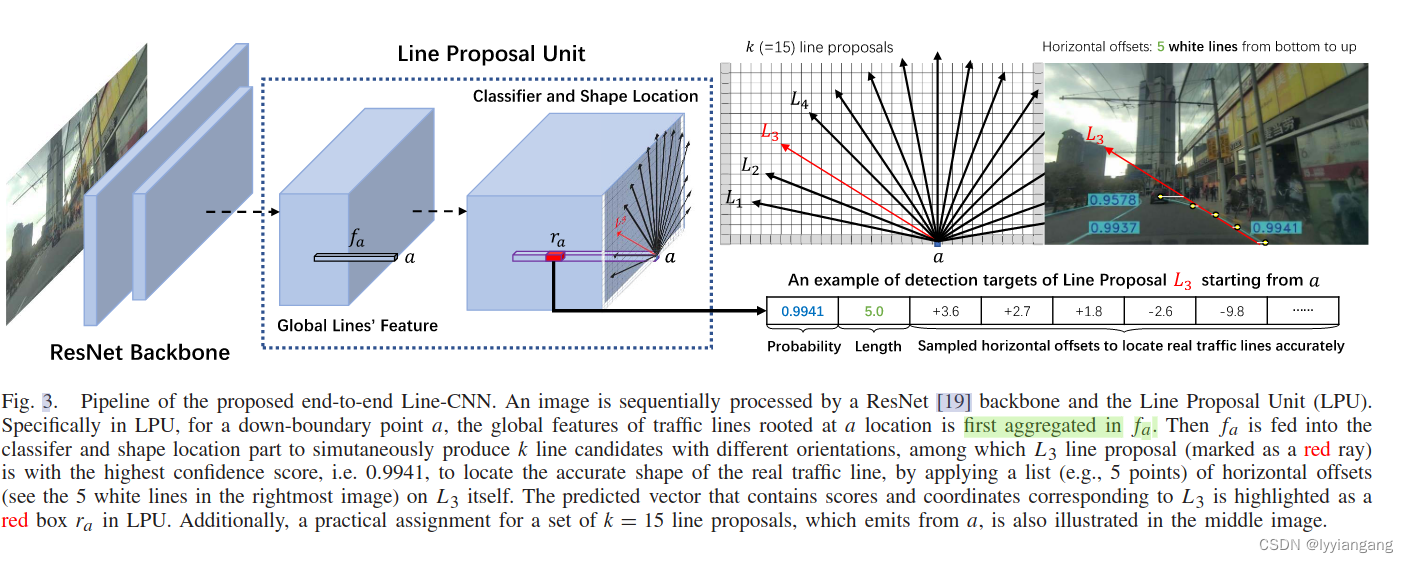
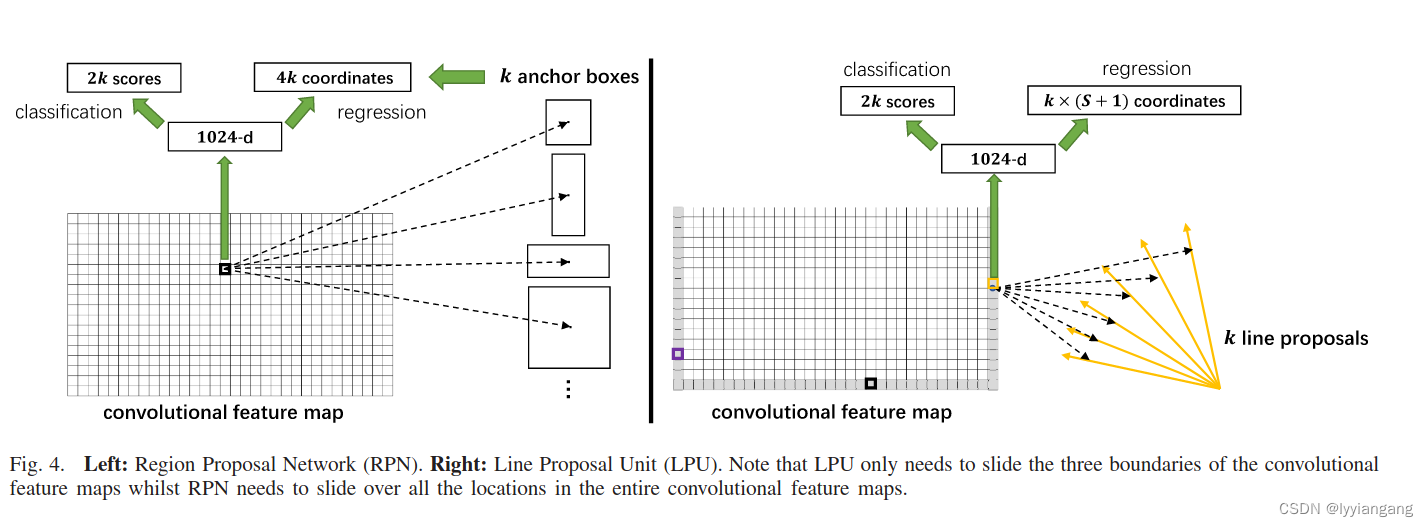
当然更细致的定义可以参考Line-CNN: End-to-End Traffic Line Detection With Line Proposal Unit 这篇文章,他们的定义都很类似。
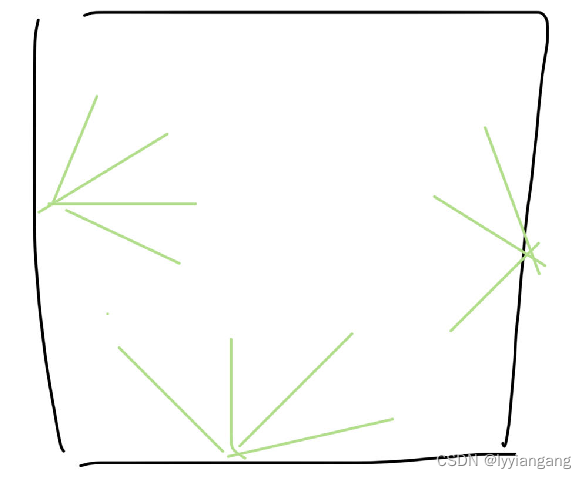
论文在图像的左右以及图像底边上设置anchor,每侧设置anchor的方向都朝图像内部。每个anchor定义如下:
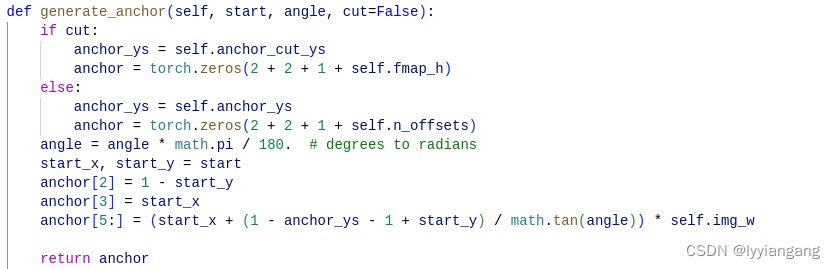
-
anchor的定义
[negative score, positive score, start_y, start_x, lenght, x0_cord, x1_cord, …] -
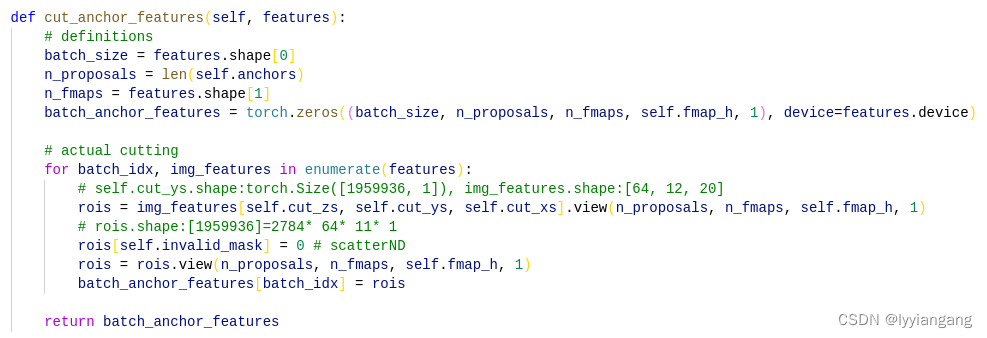
anchor cut 和anchor的区别
anchor定义的点会超出图像的左右边缘,cut则会用左右边缘位置clip这些anchor 点得到anchor cut. 正因为很多anchor点在图像外,所以从backbone feature预测时需要人工强行将图像外的点置零,避免从图像外的anchor点学东西。















 3275
3275











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









