







计算走过的距离
项目内容:计算机器人走过的距离。
相关模块:直行、转向、转角检测、显示。
程序设计
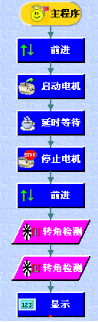
在本例中,我们让机器人先走一段直线,接着走一段弧线,然后再走一段直线。最后,调用两个转角检测模块,分别检测左轮和右轮的转角,并显示出来,例程如图所示。
参数设置
“转角检测”模块:打开“转角检测”模块的对话框,如图
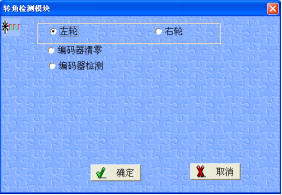
在下图对话框中选择“左轮、编码器检测”,就会弹出如下对话框:
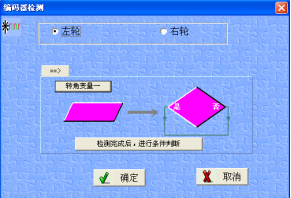
在其中选择“转角变量一”,确定。
用同样的方法,将第二个“转角检测”模块的参数设置为“右轮、编码器检测、转角变量二”。
“显示”模块:选择“引用变量”,在两行中分别显示“转角变量一”和“转角变量二”。
仿真运行
仿真运行时,显示轨迹,可以看到机器人走过一条曲线,最后在右上角的显示屏上显示出左右轮的转角数。
机器人的轮子转一圈,机器人的光电编码器接收到33个脉冲,转角计数为33。真实的能力风暴机器人轮子的直径d=64mm。您可以根据检测到的左右轮平均转角数,用如下公式计算出机器人走过的平均距离:
您还可以在以上例程中添加一段程序,计算机器人走过的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 2126
2126











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









