







通过Robotstudio获取机器人D-H参数!
D-H参数法
在建立坐标变换方程时,把一系列的坐标系建立在连接连杆的关节上,用齐次坐标变换来描述这些坐标之间的相对位置和方向,就以建立起机器人的运动学方程。现在的问题是如何在每个关节上确定坐标系的方向,以及如何确定相邻两个坐标系之间的相对平移量和旋转量,即需要采用一种合适的方法来描述相邻连杆之间的坐标方向和参数。常用的是D-H参数。
如何通过Robotstudio获取机器人D-H参数
-
首先需要在电脑上安装Robotstudio(RS),在安装目录下找到ABB Library
我的安装路径 ——> E:\ABB Industrial IT\Robotics IT\RobotStudio 6.07\ABB Library

-
在ABB Library里有个Robots文件夹,这个文件夹下面有很多机器人模型库,找到自己的机器人型号

-
将自己的机器人型号的库文件用解压缩软件进行解压

-
打开PIM.xml文件(可以先用浏览器打开,在另存为TXT文本,不然文件格式有点问题)


-
在TXT文档里查找JointInfos

JointInfos下面的内容就是机器人的D-H参数,例如第一个Link的参数
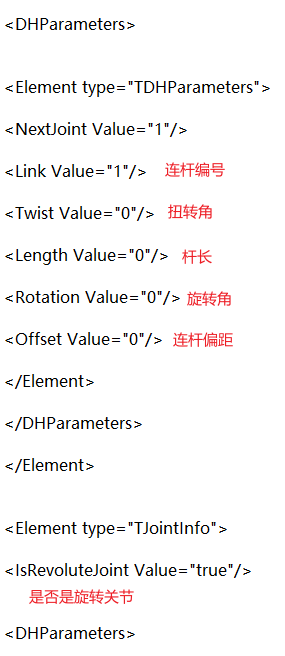
**注意:**此文件的D-H参数为改进后的D-H参数!!!
更多内容欢迎访问我的博客!















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









