




目录
0、说在前面
本人找了大量文献想要计算出符合自己试验的比例阀控液压缸控制系统的传递函数,经历了漫长的时间才有了下面的成功,最后到计算的时候发现有太多的未知量无法计算得出(不知道比例阀电磁铁参数以及液压缸一些固有参数),而且计算的单位比较难统一,无法得到其他研究者的非常具体的规整的传递函数表达式(在控制理论方面研究不够深刻),算出了也不知道是不是符合我这个现实的系统,遂放弃。但是我花了这么长时间计算这个东西,希望能留下一些痕迹!
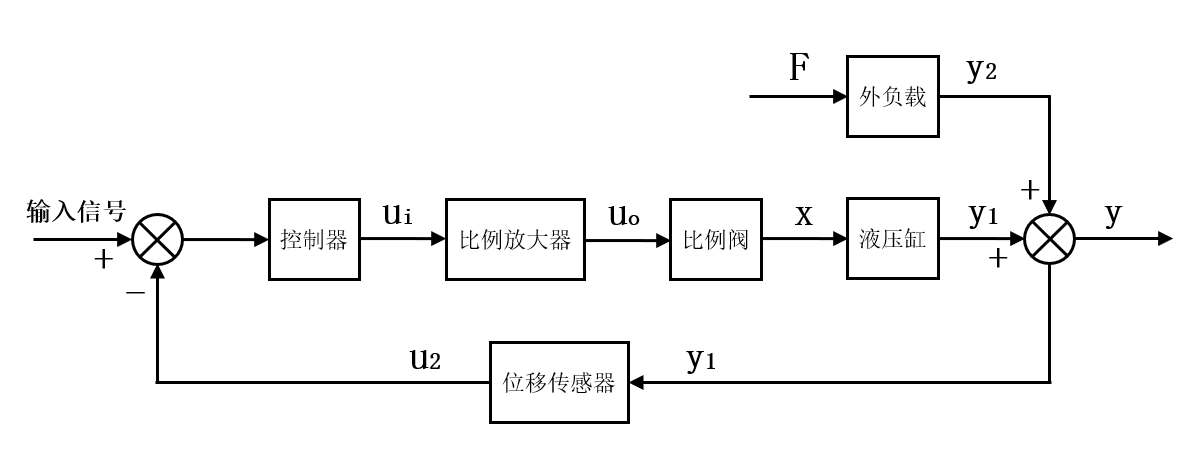
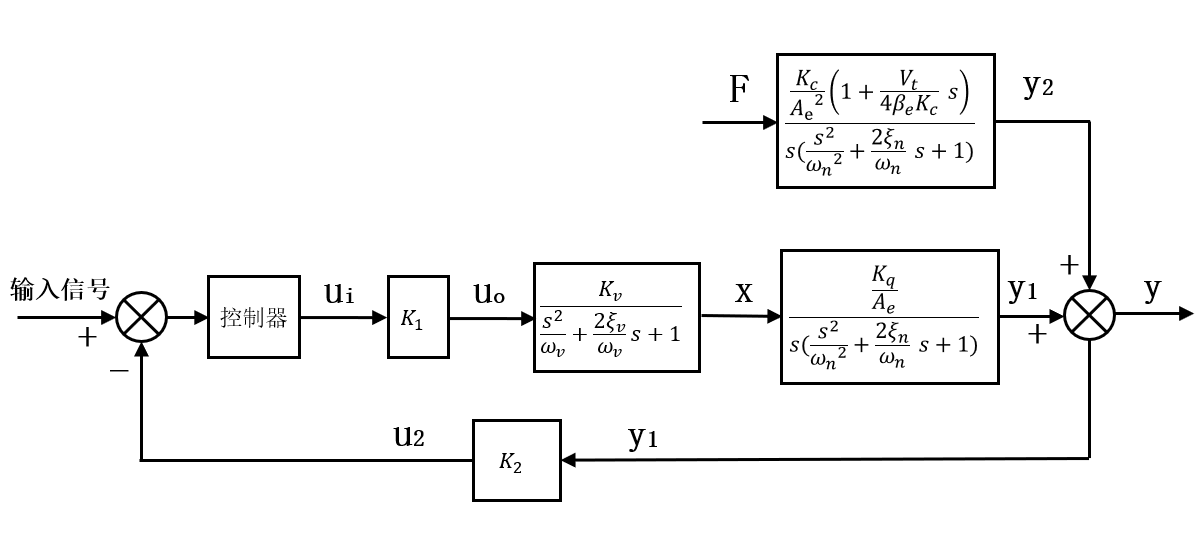
下图为比例阀控液压缸速度控制系统原理图:
1、比例放大器的数学模型
|
| (1) |
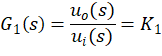
uo(s)比例放大器输出电压;ui(s)比例放大器输入电压;K1比例放大器增益系数
2、位移传感器的数学模型
|
| (2) |

u2(s)位移传感器反馈电压信号;Y(s)活塞杆位移;K2位移传感器转换系数
3、比例阀的数学模型
|
| (3) |
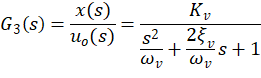
x(s)阀芯位移;Kv比例阀电磁铁增益系数;ωv比例电磁铁固有频率;ξv比例电磁铁阻尼比
4、阀控液压缸的数学模型
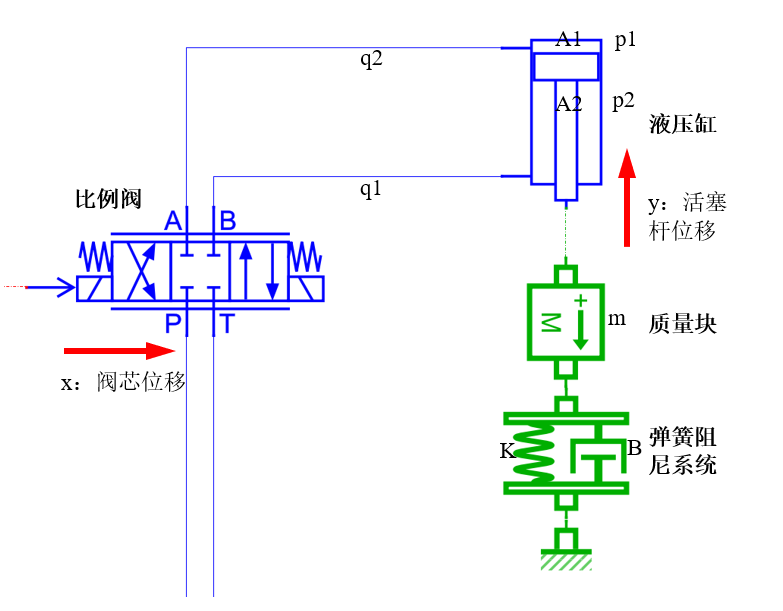
1)比例阀的负载流量线性化方程
|
| 负载流量方程 |
Cd流量系数;ω节流口的面积梯度;ρ液压油密度;ps供油压力;p2有杆腔压力
进行线性化:
|
| (4) |
qL负载流量;Kq比例阀流量增益系数;Kc比例阀流量-压力增益系数;pL负载压力
2)液压缸流量连续性方程(不计内外泄漏)
|
| (5) |
|
| A1有杆腔面积;A2无杆腔面积 |
|
| n为液压缸两腔的流量比 |

- Vt液压缸等效容积;βe液压油的弹性系数;Ci内泄漏系数;Ce外泄漏系数
3)力平衡方程(弹性负载、黏性阻尼忽略不计)
|
| (6) |
m等效到活塞杆上的质量;B黏性阻尼;K弹性系数
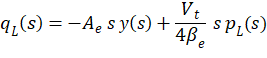
4)Laplas变换
将式4-6进行Laplas变换有:
|
| (7) |
|
| (8) |
|
| (9) |
联立三式消去pL(s)、qL(s),整理得阀控液压缸输出位移y(s)得动态特性方程为:
|
| (10) |
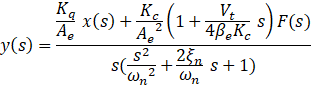
其中:
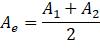

A1有杆腔面积;A2无杆腔面积;V1进油腔容积;V2回油腔容积;
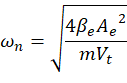
|
| (11) |
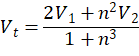
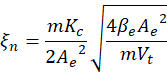
|
| (12) |
结合各个环节的数学模型就可以得到下图的比例阀控液压缸速度控制系统传递函数框图:
5、最终表达式
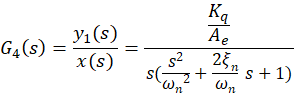
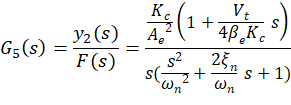
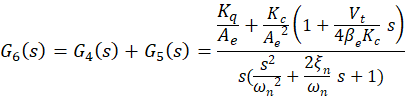
外负载和阀芯位移对活塞杆位移的传递函数可以合并到一起,由于是并联,所以直接相加即可:
|
| (13) |
前面的都是串联,直接相乘:
|
| (14) |

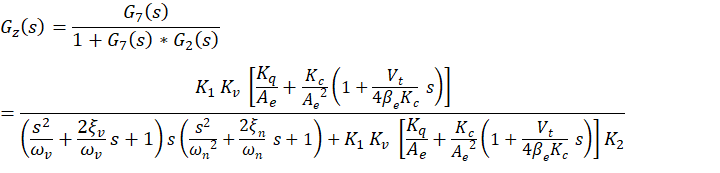
结合位移传感器的负反馈,最终得到开环传递函数式子:
|
|
K1比例放大器增益系数;
Kv比例阀电磁铁增益系数;
Kq比例阀流量增益系数;
Ae液压缸等效活塞作用面积;
Kc比例阀流量-压力增益系数;
Vt液压缸等效容积;
βe液压油的弹性系数;
ωv比例阀电磁铁固有频率;
ξv比例阀电磁铁阻尼比;
ωn液压缸固有频率;
ξn液压缸阻尼比;
K2位移传感器转换系数;
参考文献
[1] 孟亚东,杨婉秋,甘海云等. 电液比例对称阀控非对称液压缸的模型研究 [J]. 机床与液压, 2020, 48 (20): 54-59+70.
[2] 董明鑫,孔祥臻. 基于模糊PID控制的电液比例阀控缸系统泄漏补偿研究 [J]. 机床与液压, 2022, 50 (16): 143-149.
[3] 王辉,刘艺豪,周利明等. 施肥播种机肥料流量分段式PID控制系统设计与试验 [J]. 农业机械学报, 2023, 54 (02): 32-40+94.
[4] 薛冰,周利明,牛康等. 基于自适应模糊PID的小麦播深控制系统研究 [J]. 农业机械学报, 2023, 54 (S1): 93-102.
写在最后
计算内外泄漏和考虑弹簧阻尼系统太复杂了,没有写在这里,有兴趣的可以自己计算一下。
希望这篇文章能对你有帮助!



















 4600
4600

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











