









最开始我研究的是用PSO粒子群算法迭代寻优普通PID参数,现在为了让模型在动态过程中有更好的表现,引入了模糊系统,和PID控制一起组成了模糊PID控制算法。我之前的文章还有:
既然已经给出线性权重变化的PSO寻优PID算法代码,也回答过关于PSO算法寻优模糊PID五个参数的一些问题,又有同好在文章下面评论说想要PSO算法寻优模糊PID五个参数的代码,那么这篇文章就算是一个回应吧。(主要是我在CSDN论坛里面也没发现有人分享这个东西)
这个其实就是在原来的上面稍微修改一下参数就行了。
那么废话不多说,直接上代码(绝对可以运行,没有耍小心思)
主函数:
%% 清空环境
clear
clc
%% 参数设置
ws=0.9;
we=0.4; % 惯性因子 线性惯性权重1
c1 = 2; % 加速常数
c2 = 2; % 加速常数
Dim = 5; % 维数
SwarmSize = 100; % 粒子群规模
ObjFun = @PSO_FuzzyPID; % 待优化函数句柄
MaxIter = 200; % 最大迭代次数
MinFit = 0.0001; % 最小适应值
Vmax = 1;
Vmin = -1;
Ub = [2 2 10 3 4]; %边界最大值
Lb = [0 0 0 0 0]; %边界最小值
%% 粒子群初始化
Range = ones(SwarmSize,1)*(Ub-Lb);
Swarm = rand(SwarmSize,Dim).*Range + ones(SwarmSize,1)*Lb % 初始化粒子群
VStep = rand(SwarmSize,Dim)*(Vmax-Vmin) + Vmin % 初始化速度
fSwarm = zeros(SwarmSize,1);
for i=1:SwarmSize
fSwarm(i,:) = feval(ObjFun,Swarm(i,:)); % 粒子群的适应值
end
%% 个体极值和群体极值
[bestf bestindex]=min(fSwarm);
zbest=Swarm(bestindex,:); % 全局最佳
gbest=Swarm; % 个体最佳
fgbest=fSwarm; % 个体最佳适应值
fzbest=bestf; % 全局最佳适应值
%% 迭代寻优
iter = 0;
y_fitness = zeros(1,MaxIter); % 预先产生6个空矩阵
K_e = zeros(1,MaxIter);
K_ec = zeros(1,MaxIter);
K_up = zeros(1,MaxIter);
K_ui = zeros(1,MaxIter);
K_ud = zeros(1,MaxIter);
while( (iter < MaxIter) && (fzbest > MinFit) ) %迭代次数小于最大迭代并且最优值大于最小适应值
for i=1:MaxIter
w=ws-(ws-we)*i/MaxIter;
for j=1:SwarmSize
% 速度更新
VStep(j,:) = w*VStep(j,:) + c1*rand*(gbest(j,:) - Swarm(j,:)) + c2*rand*(zbest - Swarm(j,:));
if VStep(j,:)>Vmax, VStep(j,:)=Vmax; end
if VStep(j,:)<Vmin, VStep(j,:)=Vmin; end
% 位置更新
Swarm(j,:)=Swarm(j,:)+VStep(j,:);
for k=1:Dim
if Swarm(j,k)>Ub(k), Swarm(j,k)=Ub(k); end
if Swarm(j,k)<Lb(k), Swarm(j,k)=Lb(k); end
end
% 适应值
fSwarm(j,:) = feval(ObjFun,Swarm(j,:));
% 个体最优更新
if fSwarm(j) < fgbest(j)
gbest(j,:) = Swarm(j,:);
fgbest(j) = fSwarm(j);
end
% 群体最优更新
if fSwarm(j) < fzbest
zbest = Swarm(j,:);
fzbest = fSwarm(j);
end
end
iter = iter+1; % 迭代次数更新
y_fitness(1,iter) = fzbest; % 为绘图做准备
K_e(1,iter) = zbest(1);
K_ec(1,iter) = zbest(2);
K_up(1,iter) = zbest(3);
K_ui(1,iter) = zbest(4);
K_ud(1,iter) = zbest(5);
end
end
%% 绘图输出
figure(1) % 绘制性能指标ITAE的变化曲线
plot(y_fitness,'LineWidth',3) %默认线型,线宽为3号
title('最优个体适应值','fontsize',18);
xlabel('迭代次数','fontsize',18);ylabel('适应值','fontsize',18);
set(gca,'Fontsize',18);
figure(2) % 绘制模糊PID控制器量化、比例因子变化曲线
plot(K_e,'y--','LineWidth',3) %黄色虚线
hold on
plot(K_ec,'b--','LineWidth',3) %蓝色虚线
plot(K_up,'k-','LineWidth',3) %黑色实线
plot(K_ui,'r-','LineWidth',3) %红色实线
plot(K_ud,'g-','LineWidth',3) %绿色实线
title('Ke、Kec、Kup、Kui、Kud 优化曲线','fontsize',18);
xlabel('迭代次数','fontsize',18);ylabel('参数值','fontsize',18);
set(gca,'Fontsize',18);
legend('Ke','Kec','Kup','Kui','Kud');
待优化函数句柄PSO-FuzzyPID:
function z=PSO_FuzzyPID(x) %function的名字要与文件名一样
assignin('base','Ke',x(1)); %为指定工作区中的变量赋值;将值 x(1) 赋予 MATLAB 基础工作区中的变量 Ke
assignin('base','Kec',x(2));
assignin('base','Kup',x(3));
assignin('base','Kui',x(4));
assignin('base','Kud',x(5));
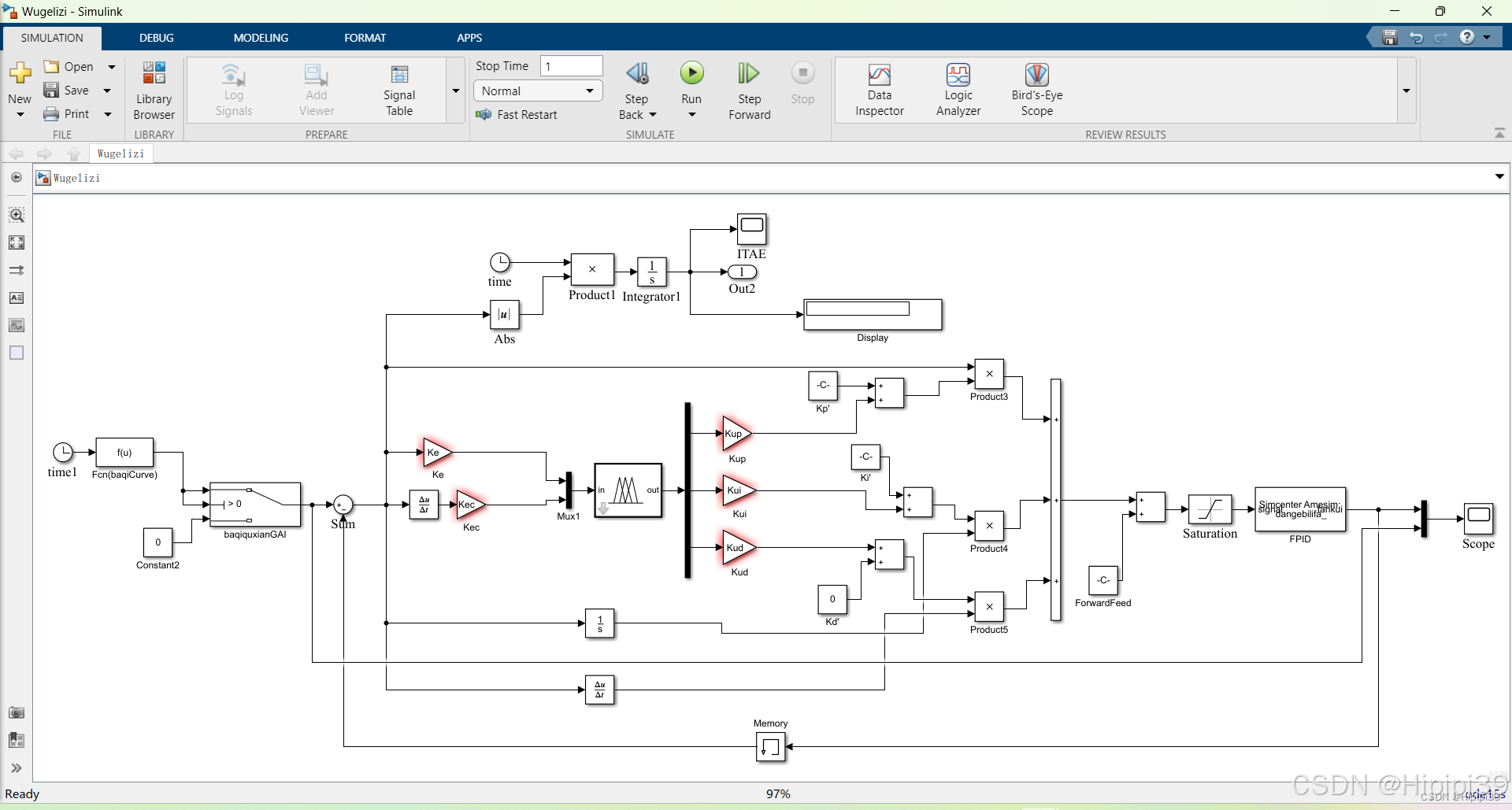
[t_time,x_state,y_out]=sim('PSO_FuzzyPIDModel',[0,1]); %需要仿真的simulink模型,与其名字一样
z=y_out(end,1); %返回性能指标输出矩阵模糊PID的simulink模型:
TIPS:
1)第一个文件名随便取,但是第二个文件名要和你待优化函数句柄名字一模一样;
2)你的PID仿真Simlink模型名字就要和sim后面那个名字一样,这样才能调用;
3)PSO_FuzzyPIDModel后面的是每一次仿真的时间;
4)要配合simlink搭建的ITAE输出一起使用。
与普通的PSO寻优PID的不同之处:
1) 普通的PSO寻优PID的维数是3维,只需要寻优PID三个参数,而PSO寻优模糊PID量化/比例因子的维数是5维,需要寻优五个参数;
Dim = 5; % 维数2)同理,由于需要寻优五个参数,所以寻优位置边界要设置五个;
Ub = [2 2 10 3 4]; %边界最大值
Lb = [0 0 0 0 0]; %边界最小值3)同理,需要预先建立五个空矩阵;
K_e = zeros(1,MaxIter);
K_ec = zeros(1,MaxIter);
K_up = zeros(1,MaxIter);
K_ui = zeros(1,MaxIter);
K_ud = zeros(1,MaxIter);4) 同理,迭代寻优结果也是需要设置五个参数;
K_e(1,iter) = zbest(1);
K_ec(1,iter) = zbest(2);
K_up(1,iter) = zbest(3);
K_ui(1,iter) = zbest(4);
K_ud(1,iter) = zbest(5);5)待优化句柄的matlab子文件需要将五个工作区的变量赋值到simulink模型中;
assignin('base','Ke',x(1)); %为指定工作区中的变量赋值;将值 x(1) 赋予 MATLAB 基础工作区中的变量 Ke
assignin('base','Kec',x(2));
assignin('base','Kup',x(3));
assignin('base','Kui',x(4));
assignin('base','Kud',x(5));总的来说,没有什么技术含量的。就是增加一些参数。
如果帮到了您,可以点一个大大的赞吗?这会对我有很大的帮助。👍
希望我的经历能够给同好们帮助!😀
不清楚的欢迎评论哦!



















 4814
4814

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











