









 本文探讨了使用PSO粒子群算法优化模糊PID控制器参数的过程。针对仿真中遇到的问题,如论域范围设定、模糊规则制定及优化参数范围确定等方面进行了详细讨论。
本文探讨了使用PSO粒子群算法优化模糊PID控制器参数的过程。针对仿真中遇到的问题,如论域范围设定、模糊规则制定及优化参数范围确定等方面进行了详细讨论。
这是我建立的simulink模糊PID控制模型:

由于不想手动来调这几个值(量化因子和比例因子),就用了智能算法PSO粒子群算法来迭代分析得到最优适应度值最好的五个参数值。
下面两张图是采用这个思路跑仿真3天跑出来的结果:


现在有三个问题:
第一:模糊控制器的两输入(E、Ec)三输出(K▲p、K▲i、K▲d)论域范围和隶属度函数怎么确定?我的理解是量化因子E误差为输入值与反馈值最大误差的范围为它的论域范围,同理Ec误差变化率就相当于位移之于加速度;比例因子K▲p论域范围为输出Kp的乘积变化范围,K▲i、K▲d同理;隶属度函数就完全随缘,我用的是一篇论文的相类似的隶属度函数。
仿真的时候matlab命令行会有warning,输入E和Ec总是会超过设定的E、Ec的论域范围(这里没有截到图),当时我尝试过增大E和Ec的论域范围,但都会有稍微超出一点点大小的值而出现warning,因为不是错误error也就能顺利跑完仿真。这一个问题有没有什么解决办法?
下图是我设置的论域范围和隶属度函数:





第二:如何根据具体物理试验设置特定的模糊规则?我看论文别人都说这个看经验,有没有什么书籍专门介绍了这方面的内容没有?单独对模糊PID来说。
下图为我建立的模糊规则控制表(论文截图):



第三:PSO寻优这五个值的寻找范围怎么确定?单独对PSO寻优来说
从第三张图五个值得迭代优化曲线可以看出来,Kui、Kec到后面就到达了设置的寻优极限边界,这肯定是不对的。难道只能仿真一次看曲线有没有到达极限边界然后在matlab里面调大边界值范围吗?但是我这一次仿真就要3天,这效率是不是太低了。
如果有相关研究方向的大佬欢迎在评论区讨论,这对我之后的研究很重要!如果成功解决了,孩子也就能顺利毕业了!555
2024.08.11更新
第一:模糊控制器的两输入(E、Ec)三输出(KΔp、KΔi、KΔd)论域范围和隶属度函数怎么确定?
1、论域范围的确定
从下图[1]可以得出,模糊PID的PID参数是在原来的PID初始值(Kp0、Ki0、Kd0参数符号都以下图为准)加上模糊控制器输出的动态调整值(ΔKp、ΔKi、ΔKd),动态调整值是输出的模糊域参数(ΔKP、ΔKI、ΔKD)乘上比例因子,我的PSO粒子群算法需要求解的就是这个值,再加上前面输入的误差和误差变化率的量化因子,一共需要优化五个值。
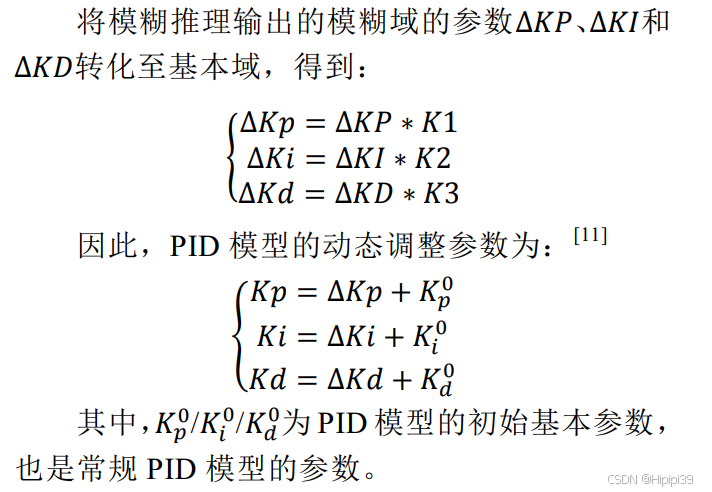
那么论域范围是如何确定的呢?
从下图[1]可知五个变量有基本论域和模糊论域,我问题中的论域范围指的是模糊论域。对于模糊PID问题,一般偏差和偏差变化取范围-6~6;PID的变化量的变化范围取-3~3。
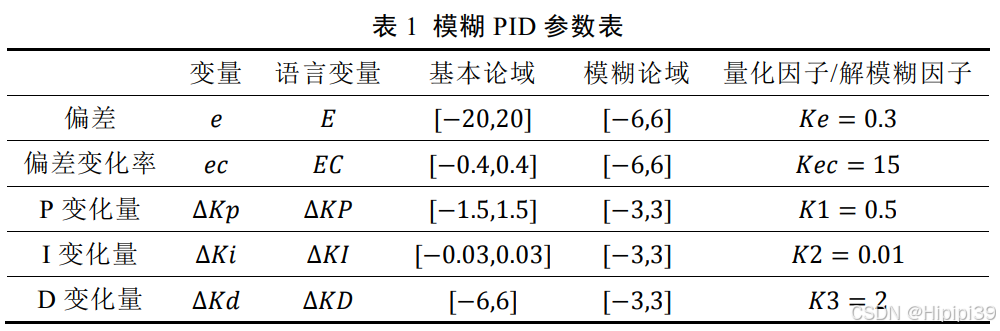
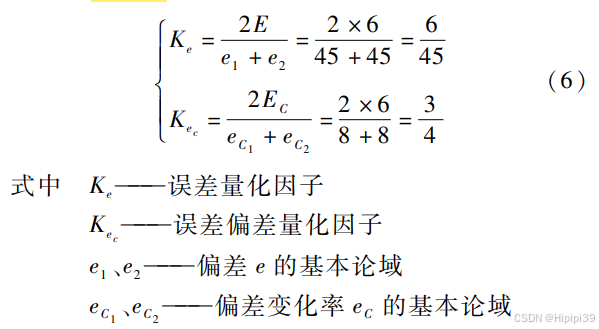
基本论域指的是实际变化范围,模糊论域是指基本论域乘上量化因子/除以比例因子映射到模糊域上的范围。如果知道基本论域的范围,那么量化因子可以按照下图的公式[2]进行计算,比例因子则相反,是用除法,这里没有给出。我的问题是不确定基本论域的范围,所有用智能算法来迭代优化。
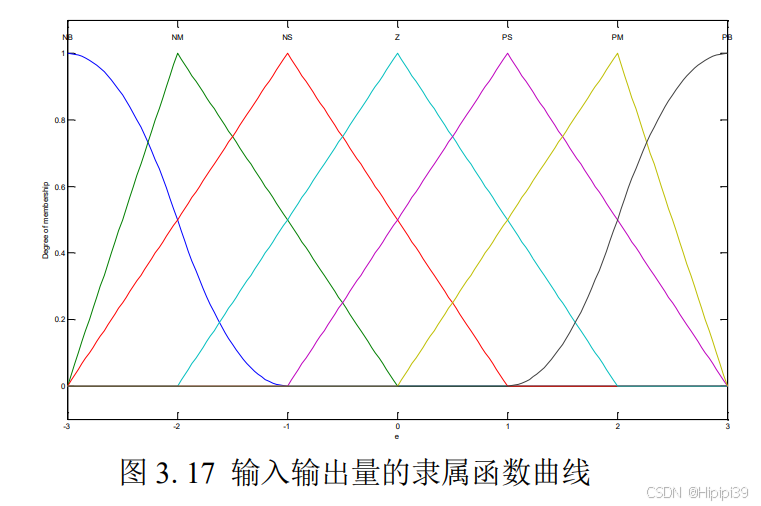
2、隶属度函数的确定
Matlab的模糊工具箱提供了多种隶属度函数,比如三角函数、高斯函数、梯形函数、钟型函数、Z型函数、S型函数等。对于特定问题需要选择合适的隶属度函数,我看大多数论文里都是为了简单,直接全部都选择三角函数,因为运算简单。还有的选择中间选择三角函数,两端选择高斯函数。原文是“中间取三角隶属函数, 因其运算简单,所需操作较少,对模糊值的取值影响不大,两侧分别选择较圆滑的曲线,因其在区间边缘,模糊值的取法对系统影响较大。” [3]
第二:如何根据具体物理试验设置特定的模糊规则?
模糊规则基本上就是根据专家经验和知识来确定的。为了获取最佳的系统性能,常常需要多次是用试错法,以修正模糊控制规则。不过对于模糊PID的模糊规则也已经研究得明明白白的了,无非就是Kp、Ki、Kd三个值的增加与减小。
下面我给出两个PID模糊控制规则[4][1]:
第三:PSO寻优这五个值的寻找范围怎么确定?
正是因为模糊控制器的输入和输出的基本论域范围不确定所有才会用PSO粒子群智能优化算法迭代寻优五个量化因子/比例因子,那么其实这五个因子在PSO算法的参数设置的位置边界也是不确定的。为了能进行迭代寻优,可以大概估一估基本论域的范围,尽量往大了估,这样寻优的时候范围还有余量,不至于直接寻优到了边界,这种仿真结果可能就需要再把位置边界调大再跑一边仿真。
[1]王泽文,池飞飞,程蕾萌.基于模糊PID技术的燃料电池水温控制系统设计[J].船电技术,2022,42(10):87-91.
[2]贺刚,蔡晓华,白阳,等.基于模糊PID的犊牛代乳粉奶液温度控制系统设计与试验[J].农业机械学报,2022,53(03):266-276.
[3]陈诗慧.基于神经网络的模糊PID伺服电机控制系统仿真研究[D].南京航空航天大学,2019.
[4]刘伟健,罗锡文,曾山,等.基于模糊PID控制的再生稻自适应仿形割台性能试验与分析[J].农业工程学报,2022,38(10):1-9.



















 2859
2859

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











