







 超级会员免费看
超级会员免费看
一,yolov8的环境配置工作
说明:需要相关工程全部源码的可私聊博主或评论留言
配置工作可以参考我的一篇关于yolov8环境配置的博客。
需要说明的是:直接使用:
pip install ultralytics
会导致后面对于网络结构的改进无法运行。所以如果需要对网络结构进行改进的同学,不要使用官网推荐的方式。使用requirement.txt里面的安装方式。
环境配置的参考文章
二,ROS封装
❤️完成了上面的封装之后,就可以进行ROS封装了。
catkin_create_pkg 新建一个消息包,为了后面我们接受识别的消息文件。
catkin_create_pkg yolov8_ros message_generation message_runtime roscpp rospy std_msgs
如果你不需要py文件脚本或者是cpp文件脚本的话,可以对应取消依赖项。
❤️在对应文件包里面新建一个msg文件夹,用来放置我们的消息包。
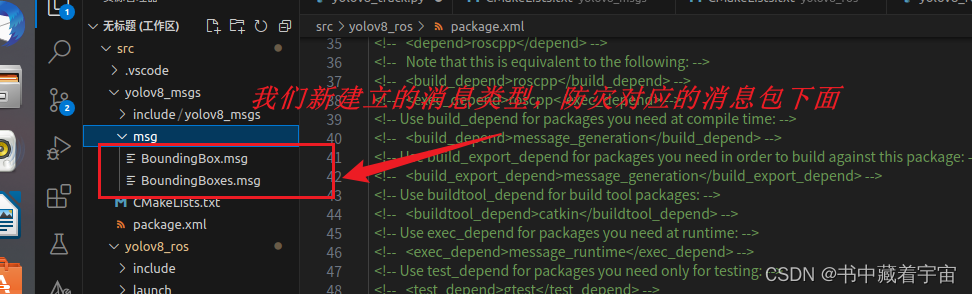
完成之后,我们对消息包进行编写。因为我们是完成目标追踪的任务。
根据yolov8的追踪识别结果,我们需要这样子设置新的消息包类型。
Bounding

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 2343
2343











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











