







视频简介
Mobileye的R&D VP关于感知技术的介绍
AV Sensing Tech and Algorithms with Gaby Hayon of Mobileye
Talk时间: 2019年11月,放出来时是2020年底,已经过去了一年。
新的可以看CES2021 Amnon Shashua的talk
Slides可在intel网站下载:slides,或者csdn搬运下载。
总结
- 视频里有些跳跃,演讲人不太熟。有些PPT里的材料略过了,建议仔细看PPT文件。
- 和2021CES的talk相比,仍然注重说明True Redundancy
- 2019年底的概念,还是12目,而不是2021年初的11目8M。
- 从150+52,减少到1个120° 8M,说明这一个足够cover 52°原来分辨率(猜测是1080p或720p)的观测距离。
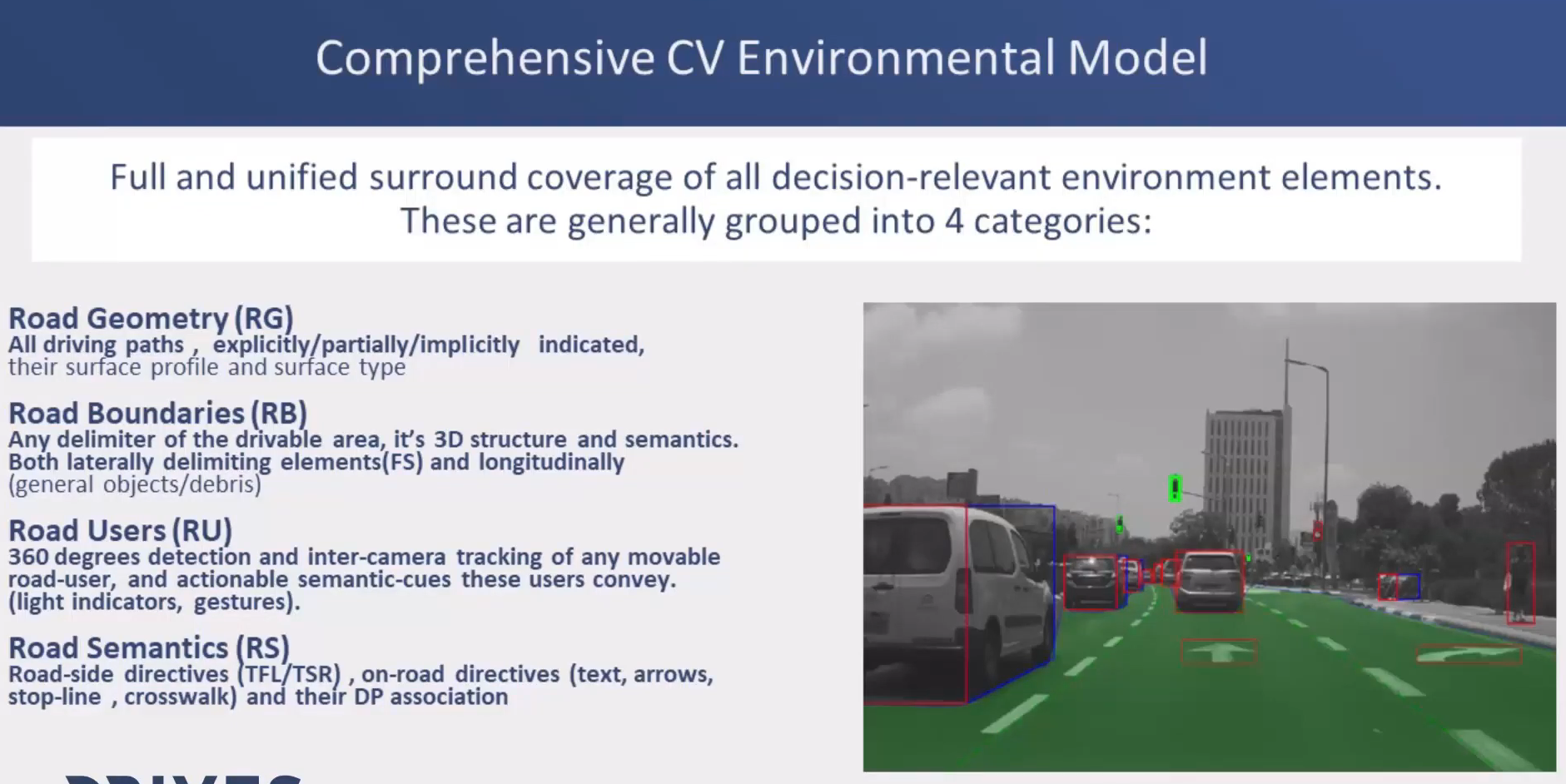
- CV环境模型中的4类别分类可以借鉴一下:RG(Road Geometry) / RB(Road Boundary) / RU(Road User) / RS(Road Semantics).
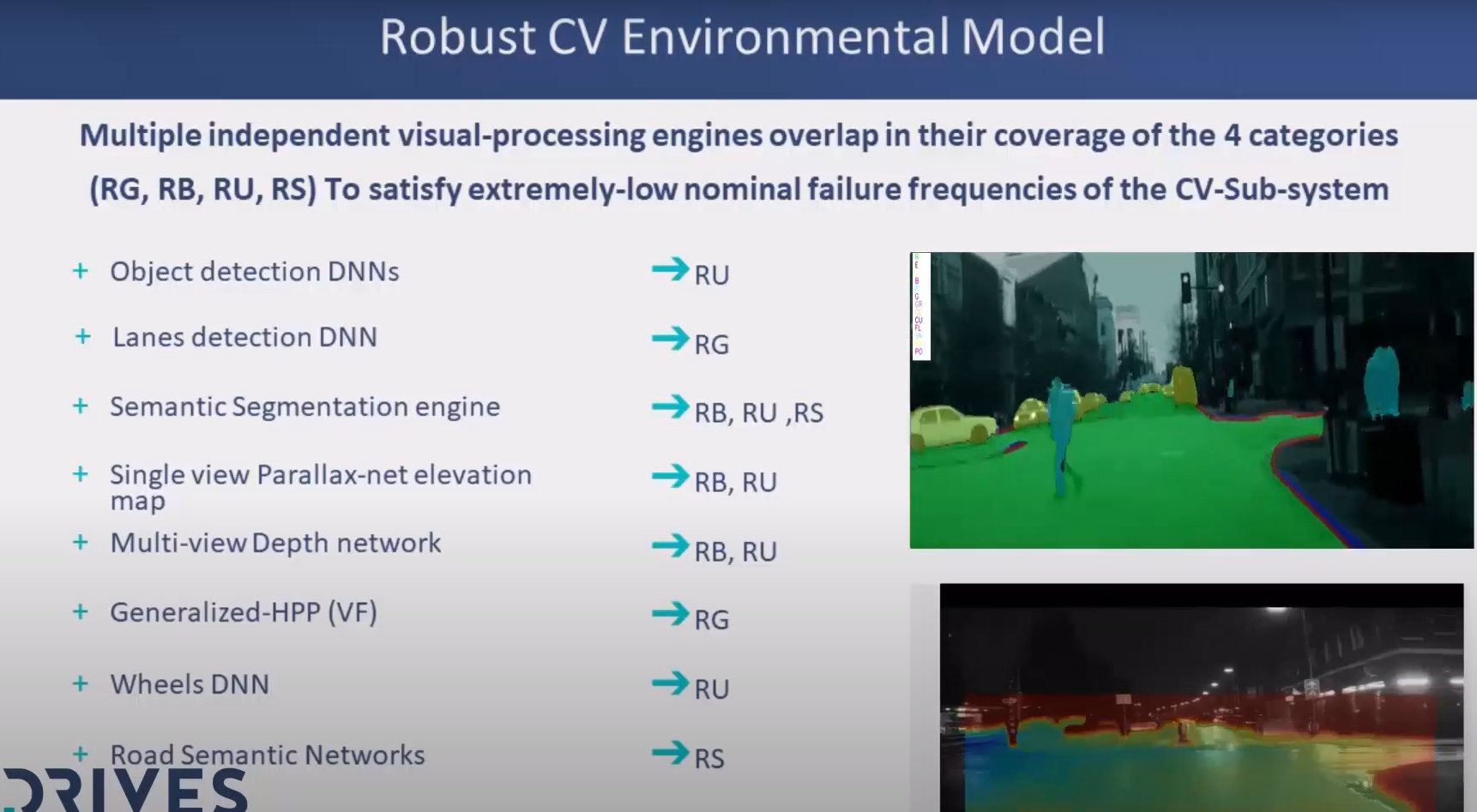
- CV检测用到了不同算法的冗余(但不一定每个application都有多个算法覆盖)
- 除了通常的检测,还有些其他值得注意的检测:
- 开车门
- 轮子
- debris
- ViDAR概念,CV出深度并用LiDAR算法
- multi-view depth网络
- single-view depth网络
疑问
- Vector Field,或者generalized HPP是什么,还需调研下
摘要
- True redundancy,环视CV 或 Radar/LiDAR系统,两套可以独立工作,达到相同的spec。
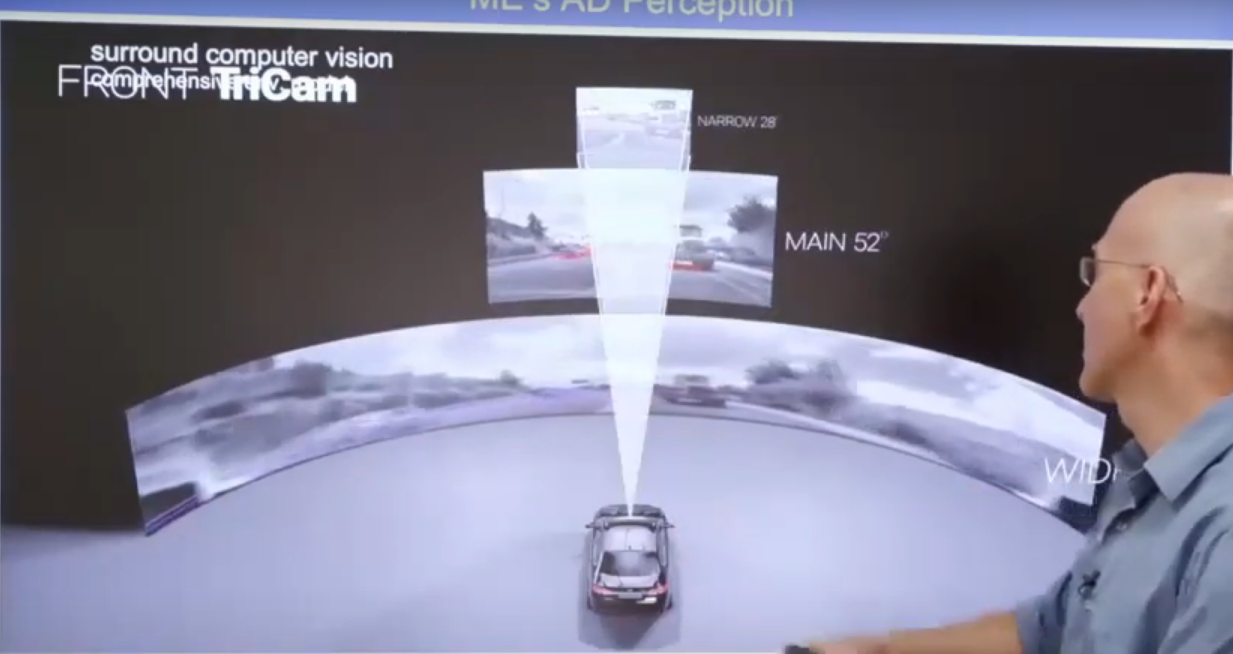
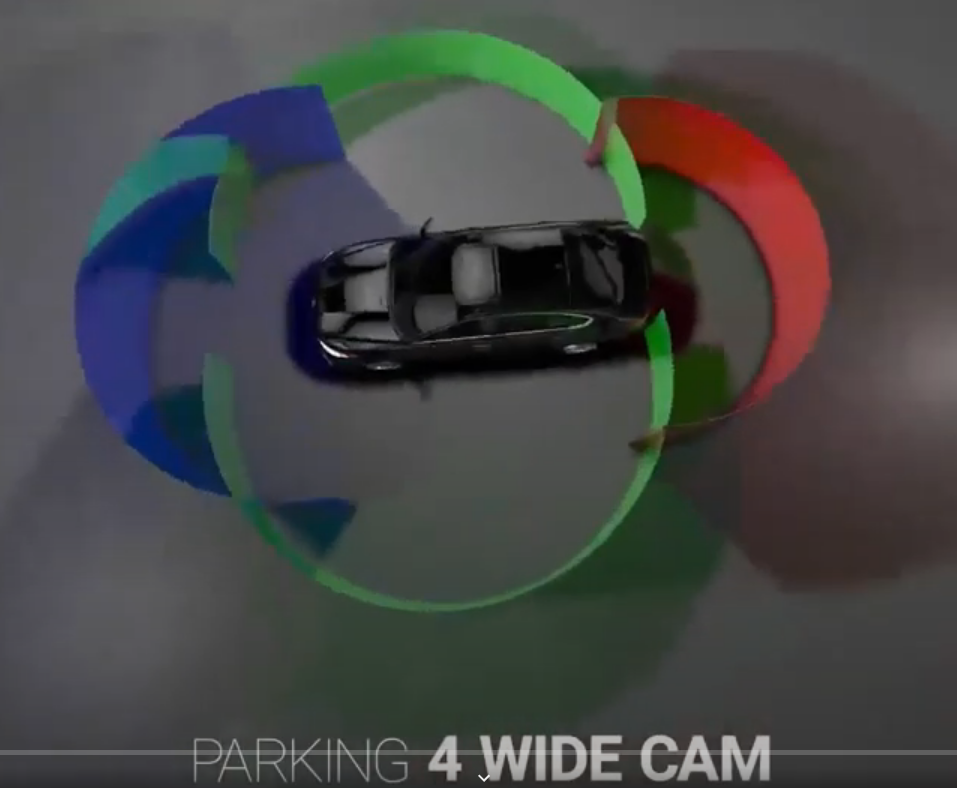
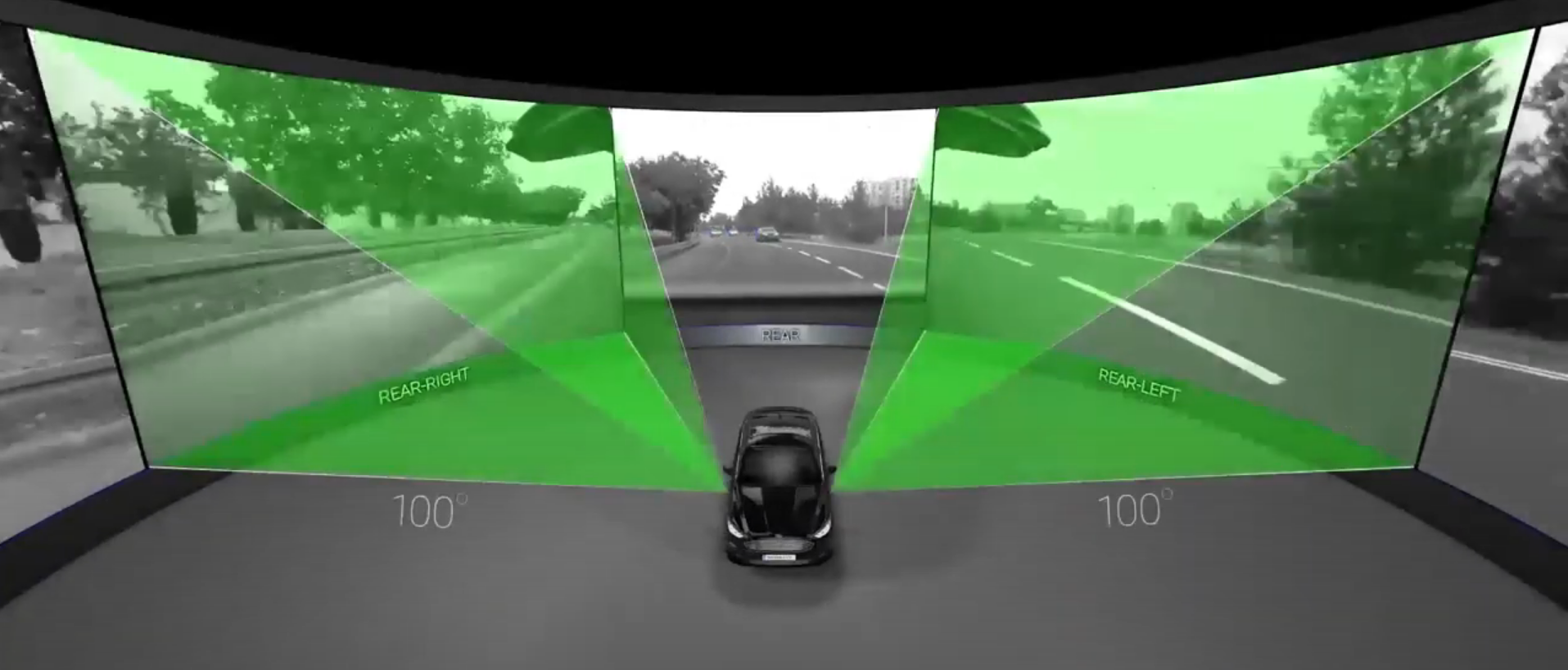
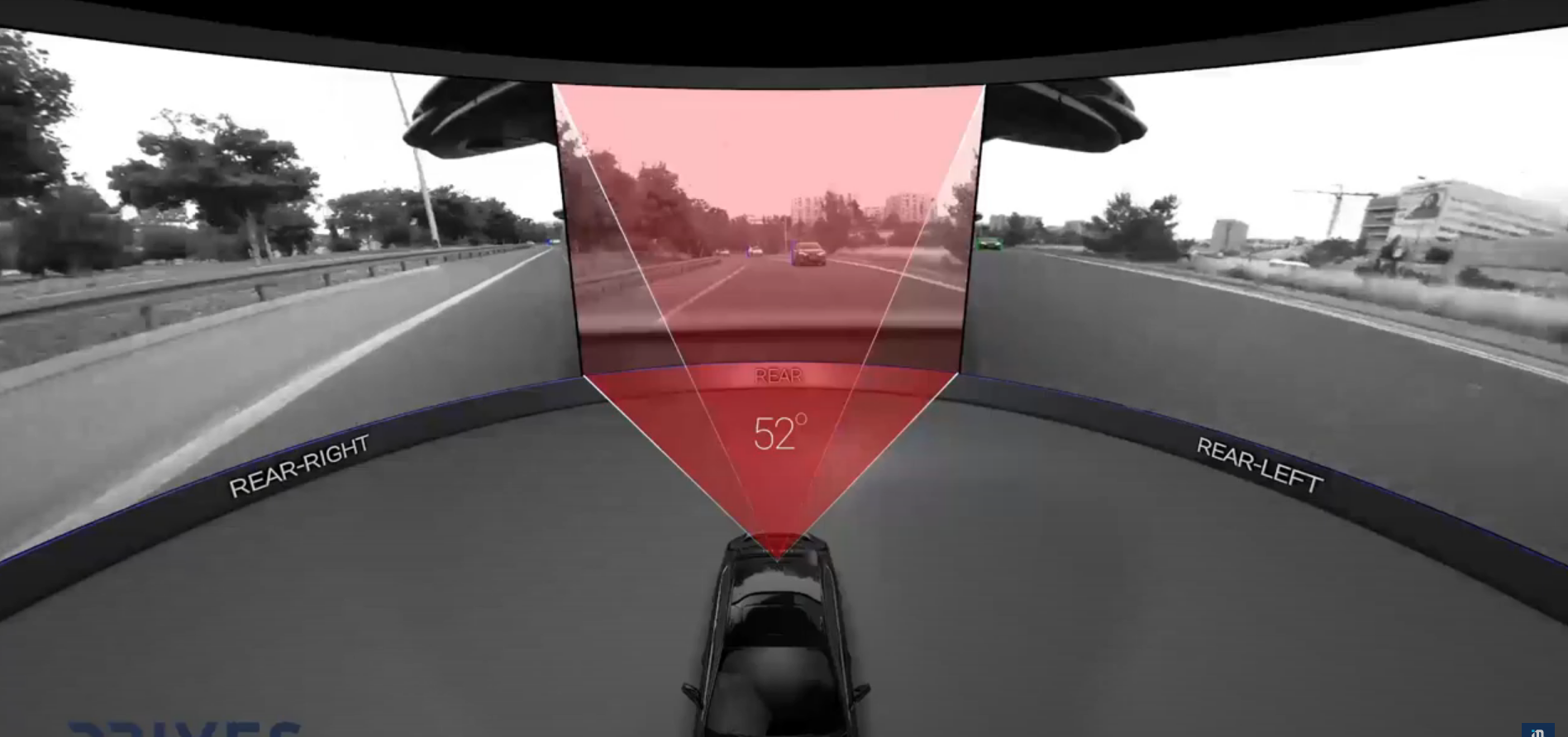
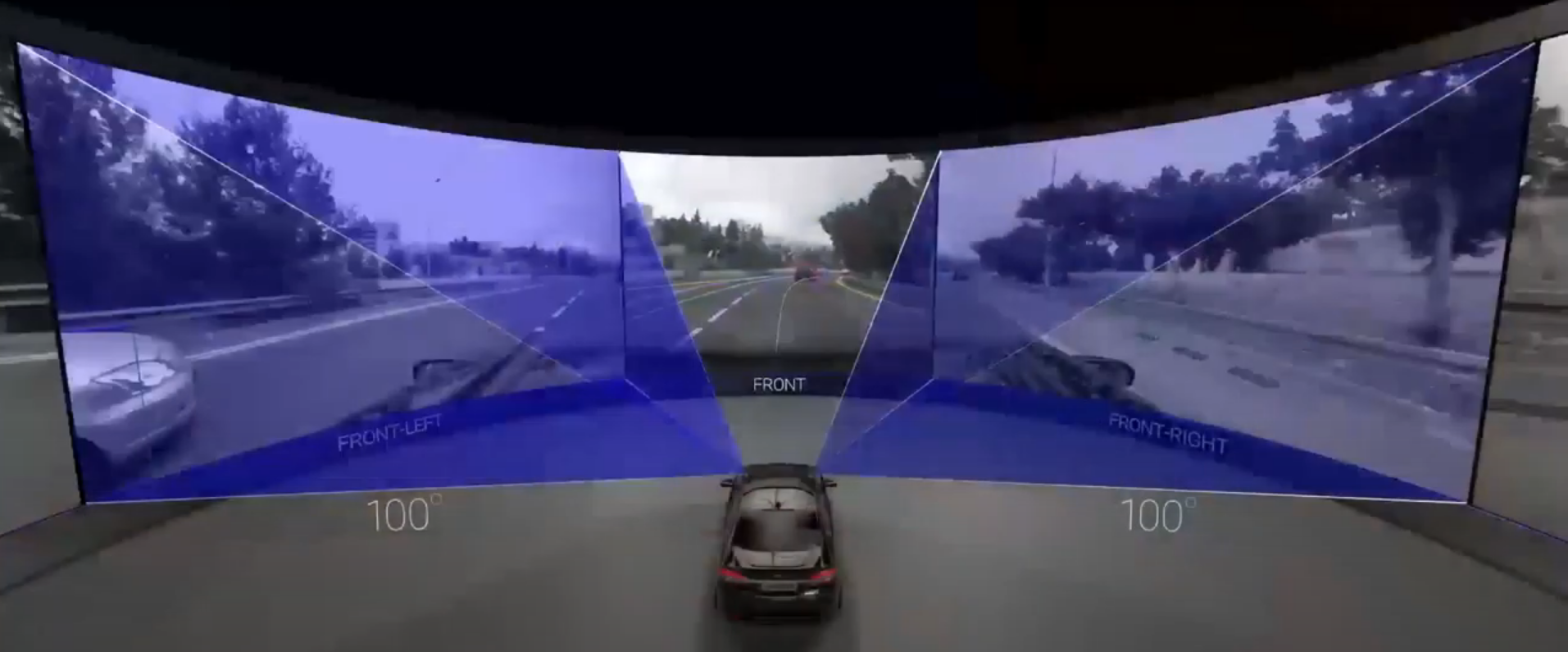
- 12目视觉传感器配置:前视三目 150+52+28°,左右侧前100°,左右侧后100°,后方52°,4个环视鱼眼。分辨率未知。
- 注意到,2021CES的talk里,前视改为了120°+28°的两个8M相机。
- 纯视觉系统,也通过不同算法进行冗余
- object/lane/wheel检测、语义分割、道路语义网络
- 有 single-view parallax net、multi-view depth net
- 从话中听出,目前还没有实用。将在future出现这样的第三套系统。
- generalized HPP提供道路几何信息
- Object检测
- 使用stitched 360°图像,来检测所有周围的物体
- 相机间需要ReID
- Metric Dimension估计,直接从网络出
- 车门检测,特别提到没有接地
- occupancy grid,从环视+前视出freespace
- RU语义
- 车的head/pose朝向
- 行人的姿态和手势
- 车灯
- 应急车辆
- RU检测,除了使用appearence based,也有structure based。通过multi-view深度学习出的depth,进行检测。
- RG
- 高尔夫车上已经有很好的车道保持功能(construction area demo)
- Vector Field(VF)
- RB
- 会用parallax net来检测debris(general objects)
部分截图
不如直接看上面的slides
True Redundancy

视觉传感器配置
ME的CV环境模型
视觉内部冗余

















 1011
1011

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









