







STM32 HAL库实现编码器测速
(还开了串口1用来调试,下文没写;然后那个short的用法就是看平衡小车之家(就是喵呜实验室的文档里头的,用法确实惊艳),文末贴了工程)
编码器接口模式
TI1和TI2连接编码器,开启定时器编码器模式后,根据TI1和TI2的信号转换序列,产生对应的计数脉冲和方向信号(此时是硬件控制CR寄存器的DIR位,软件不能再进行编程控制) 编码器接口只能是TI1和TI2,TI3和TI4是不具备编码器接口功能的。

对于计数器的计数和方向判断,如下:

cubeMx配置:直接选择一个通用定时器或者高级定时器,点开编码器模式即可
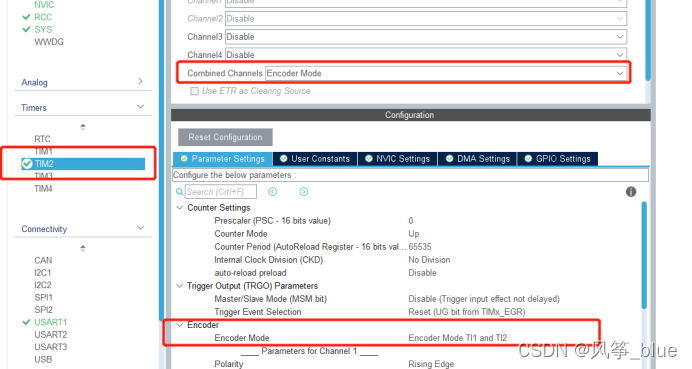
之后直接生成代码即可
Keil:
编码器数据读取函数:
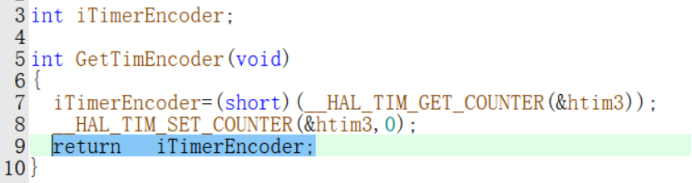
强制转换short的作用:实现正转读数为正,反转读数为负。
实现原理:寄存器所读出来的值是0-65535,而short是2字节,技术范围是-32768-32767,当寄存器读到32767的时候经过short强制转换就会溢出,使得寄存器的读数32768经过强制转换编程-32768,再下一个32769转换成-32767。所以,电机反转的时候读出的数就是反方向的速度值,不需要用 65535 去减去读出的值再加上负号才可以得到方便观察的值
Main.c需要添加的:

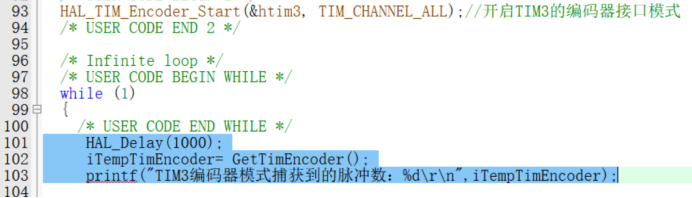
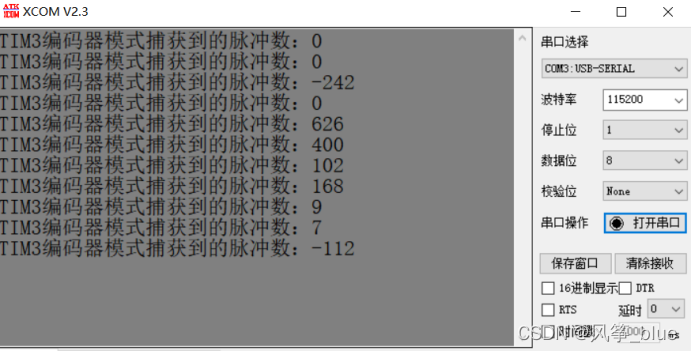
实现效果:
当电机不转的时候,编码器读数为0,当反转的时候读数为负数,正转时候为正数;由于我前面设置的是Encoder TI1&TI2,所以他是四倍频。如果要计算圈数(四倍频为例),则需要知道该电机的单相单圈脉冲,计算公式:圈数=所读的脉冲数/单相单圈脉冲/4
注意:要接编码器正负极,不然读到的数据无效且保持在一个数上下浮动。
完整工程:(指南者F103的,其实可以移植encoder的.c和.h)
链接:https://pan.baidu.com/s/1xmDYSHZCCOrg66TMNV7uSg
提取码:ld9i


















 196
196

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









