






《南极参考高程模型》
Ian M. Howat1,2, Claire Porter3, Benjamin E. Smith4, Myoung-Jong Noh1, 和 Paul Morin3
1美国俄亥俄州立大学拜德极地与气候研究中心,哥伦布,俄亥俄州,美国
2美国俄亥俄州立大学地球科学学院,哥伦布,俄亥俄州,美国
3美国明尼苏达大学极地地理空间中心,圣保罗,明尼苏达州,美国
4美国华盛顿大学极地科学中心,应用物理实验室,西雅图,华盛顿州,美国
通讯作者:Ian M. Howat(ihowat@gmail.com)
收稿日期:2018年11月6日 – 讨论开始:2018年11月13日
修订日期:2019年2月13日 – 接受日期:2019年2月15日 – 发表日期:2019年2月26日
翻译:
摘要:南极参考高程模型(REMA)是第一个分辨率低于10米的大陆尺度数字高程模型(DEM)。REMA 是通过使用亚米级分辨率的光学商业卫星影像进行立体摄影测量创建的。这些影像的高空间和辐射分辨率使得在低对比度的冰盖表面上能高质量地提取表面信息。该数字高程模型经过卫星雷达和激光高度计的配准,并进行镶嵌,提供一个覆盖几乎 95% 整个南极洲的连续表面。该镶嵌模型包括误差估计和时间戳,能够进行变化量测量。与机载激光高度计的比较验证了其典型高程误差小于1米。REMA 为南极科学提供了一个强大的新资源,并为生成大陆尺度上准确的高分辨率重复地形数据提供了概念验证。
解释:
这段文字介绍了南极的一个新的高程模型(REMA),它的分辨率比以往的模型高,能够精确到10米以内。这个模型是通过卫星影像和一些先进的测量技术(像立体摄影测量)生成的,能够清晰地呈现南极冰盖的表面,哪怕这些表面对比度很低。模型经过严格的校准,覆盖了几乎整个南极大陆,而且误差非常小。通过与其他测量方法的对比,验证了其高精度。这个新模型将为南极研究提供重要的数据支持,并证明了高分辨率地形数据在大陆级别上是可行的。
翻译:
1 引言
冰盖表面高程是冰川学中最基本的数据之一。通常,旨在量化质量平衡或冰流模型的研究受限于表面高程测量的空间和时间分辨率及准确性。极地地区尤其缺乏良好的地形数据,因为它们偏远且全球数据集的纬度限制,例如航天飞机雷达地形任务(SRTM,限于北纬60°和南纬56°)。对于大部分南极洲,连续的表面高程网格,通常称为数字高程模型(DEMs),其空间分辨率通常大于500米,或者垂直误差达到几十米或更多(例如,DiMarzio等,2007年;Griggs和Bamber,2009年;Cook等,2012年;Fretwell等,2013年;Helm等,2014年;Slater等,2018年)。这限制了它们在大地测量应用中的实用性,例如卫星影像的几何校正。公开可用的全球DEM,包括30米分辨率的ASTER GDEM(https://asterweb.jpl.nasa.gov/gdem.asp,最后访问:2019年2月13日)和最近发布的90米TanDEM-X DEM(https://geoservice.dlr.de/web/dataguide/tdm90,最后访问:2019年2月13日),在冰盖内部存在较大的误差,后者还因为X波段信号穿透冰层而出现几米的偏差(Wessel等,2018年)。此外,这些DEM没有明确的时间戳,限制了它们在高程变化测量中的应用。由于现有的DEM主要是基于卫星测距数据(雷达和激光高度计)构建的,而这些数据的误差随着地表坡度增大,因此在地形更复杂的地区(如海岸、山脉和冰川出流区)误差最大(Bamber和Gomez-Dans,2005年)。这些地区,包括南极半岛和阿蒙森海冰川出流区,也是冰盖动力学和质量平衡发生最大变化的区域。冰架变薄的测量需要高精度,因为1米的变薄仅相当于大约0.1米的表面高程变化。冰架底部融化和冰下水文等复杂的变化模式往往无法通过现有的DEM观察到。高精度的高程和高程变化可以通过机载激光高度计获得,但这些数据仅限于冰盖的狭窄(几百米)带区,并且时间间隔较长。虽然ICESat-2于2018年9月15日发射,将大大增加激光高度计观测的密度和覆盖范围,但它仍无法提供建模和数据处理应用所需的连续表面。此外,精确的带时间戳参考DEM将大大有益于卫星高度计任务,为提供验证表面、数据过滤的依据以及雷达测距和地面轨道偏移的坡度修正提供支持。南极参考高程模型(REMA)项目的目标是提供一个连续的、带时间戳的参考表面,其分辨率比目前的模型高出1到2个数量级(见图1),绝对不确定度在1米以内(取决于地面控制点的可用性),相对不确定度(即精度)达到分米级。因此,通过REMA,任何过去或未来的高程观测都可以提供高程变化的测量结果。此外,REMA还可以为各种遥感处理活动提供修正,如影像正射校正和干涉测量,为地球动力学和冰流模型、接地线绘制、表面过程研究和现场物流规划提供约束。REMA是通过从亚米级分辨率的商业卫星影像对中提取的立体摄影测量DEM构建的,并且与雷达和激光高度计数据进行了垂直配准。在这里,我们描述了构建REMA所使用的源数据集和算法,并使用多个来源的机载高度计数据对最终产品进行了验证。
解释:
这段文字讲的是关于南极冰盖高程数据的研究。冰盖的表面高程是研究冰川和冰盖变化的基础数据。由于极地地区远离人类活动中心,而且现有的全球数据集无法覆盖这些区域,很多南极的高程数据质量较差。比如,传统的高程模型分辨率大于500米,或者高程误差可以达到几十米,导致这些数据不能很好地应用于一些需要精确高程数据的工作。
目前公开的全球高程数据集(如30米的ASTER GDEM和90米的TanDEM-X DEM)在南极冰盖内存在很大误差,特别是在冰层上方有些数据偏差几米。而且这些数据没有时间标记,无法用于精确的高程变化监测。现有的高程数据大多来自卫星雷达或激光测量,而这些数据在地形复杂的地区误差较大。南极冰盖的某些地区,尤其是冰架变薄和冰流变化的地方,需要更高精度的数据。
为了改进这个问题,南极参考高程模型(REMA)项目的目标是提供一种全新的高精度、高分辨率的连续表面高程数据,并且具有时间戳,这样就能更准确地追踪高程变化。REMA的精度比现有数据高很多,它的误差一般小于1米,甚至在某些情况下精度可以达到分米级。通过REMA,任何对南极冰盖的高程观测都能得到高精度的变化数据,并且能够帮助改善卫星影像校正、冰流建模等工作。REMA是通过高分辨率卫星影像和激光高度计数据构建的,并进行了严密的验证,确保其准确性。
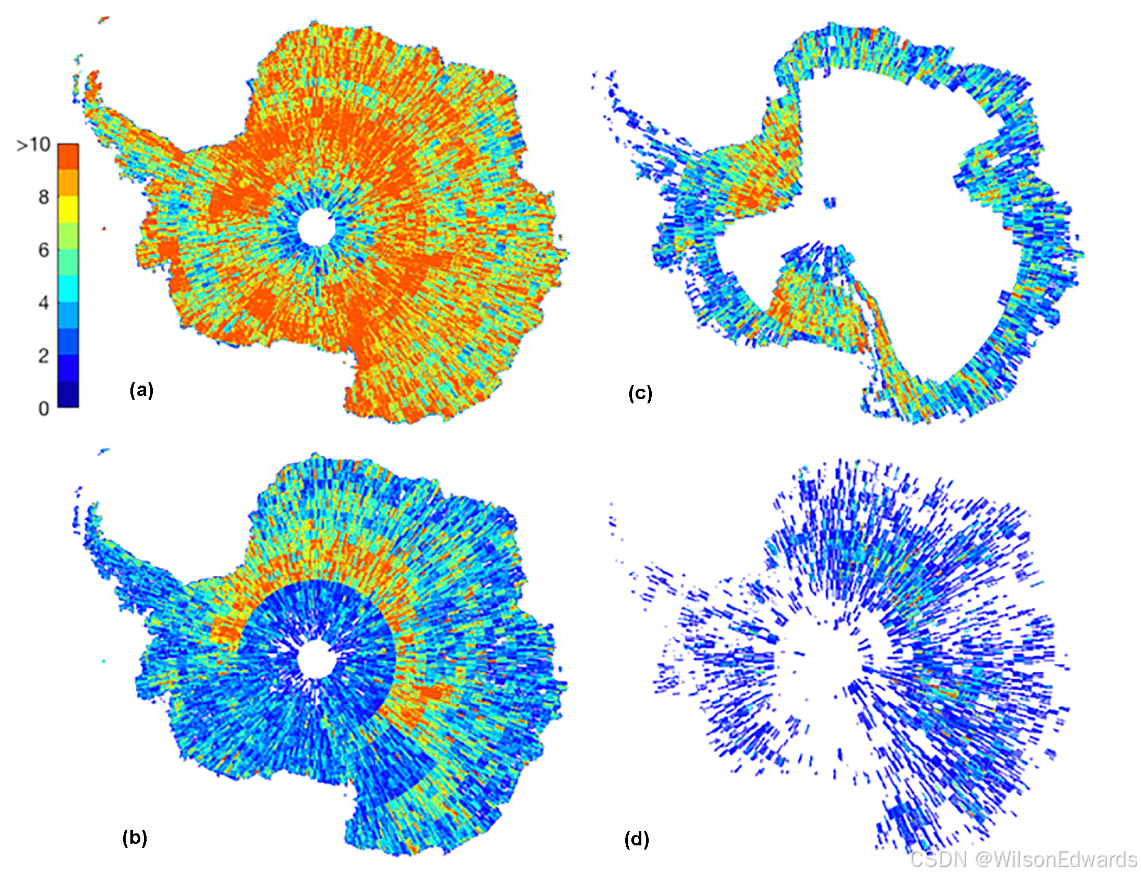
图1. 从立体亚米级影像生成的各个数字高程模型(DEMs)覆盖图,颜色表示重复次数,适用于REMA项目:(a)所有数据,(b)通过视觉质量检查的DEM(注意因程序变化导致重复覆盖的地区性减少),以及符合可接受标准的质量控制DEM,分别来自(c)CryoSat-2 和(d)ICESat GLAS 2-D活动。
解释:
图1展示了REMA项目中使用立体亚米级影像制作的数字高程模型(DEM)覆盖范围。图中用不同的颜色表示每个区域的数据重复次数。具体来说:
- (a)显示了所有的原始数据覆盖范围;
- (b)显示了那些通过了视觉质量检查的高程数据(可以看到,某些地方的重复覆盖变少了,这是因为数据处理方法发生了变化);
- (c)和(d)分别显示了两个高精度数据源(CryoSat-2卫星和ICESat的GLAS 2-D活动)生成的高程数据,它们都满足一定的质量控制标准。
表1. REMA项目中使用的卫星和影像规格
| 卫星名称 | 发射日期 | 全色带地面样本间距(天顶处)(厘米) | 天顶处的影像覆盖宽度(公里) |
|---|---|---|---|
| GeoEye-1 | 2008年9月6日 | 41 | 15.2 |
| WorldView-1 | 2007年9月18日 | 46 | 17.6 |
| WorldView-2 | 2009年10月8日 | 46 | 16.4 |
| WorldView-3 | 2014年8月13日 | 31 | 13.1 |
这个表格列出了在REMA项目中使用的卫星及其影像的技术规格,具体信息如下:
- GeoEye-1:发射于2008年9月6日,影像的全色带地面分辨率为41厘米,影像覆盖宽度为15.2公里。
- WorldView-1:发射于2007年9月18日,影像的全色带地面分辨率为46厘米,影像覆盖宽度为17.6公里。
- WorldView-2:发射于2009年10月8日,影像的全色带地面分辨率为46厘米,影像覆盖宽度为16.4公里。
- WorldView-3:发射于2014年8月13日,影像的全色带地面分辨率为31厘米,影像覆盖宽度为13.1公里。
这些卫星影像为REMA项目提供了高精度的地面数据,特别适用于通过立体摄影测量技术提取三维数据,进而构建南极的数字高程模型(DEM)。
翻译:
- 源影像与DEM处理
REMA是通过四颗商业卫星收集的立体影像构建的,这些卫星分别是WorldView-1、WorldView-2、WorldView-3和GeoEye-1,分别于2007年、2009年、2014年和2008年发射(见表1)。这些卫星由DigitalGlobe公司运营,影像通过美国国家地理空间情报局(NGA)与极地地理空间中心(PGC)签订的科学使用许可证协议分发。虽然这些影像仅限美国联邦资助的研究人员使用,但衍生产品,包括数字高程模型(DEM),可以公开分发。这些卫星的推扫式传感器提供光学影像,其全色带的地面分辨率低于0.5米。它们的摄像机指向能力使得能够从不同的视角获得重叠影像,这些影像对立体摄影测量生成DEM非常有用。仅使用卫星定位所得到的有理多项式系数(RPCs),这些DEM可能存在几米的平移误差(偏差)。通过地面控制点注册,可以将这些误差减少到20厘米(Noh和Howat,2015;Shean等,2016),这个精度与航空激光雷达的误差相当。重要的是,与其他常见的立体影像仪(如来自先进空间borne热发射与反射辐射计(ASTER))不同,这些影像仪的高空间和辐射分辨率使得在低对比度表面(如雪覆盖和冰盖内部/积累区)上能够提取出高质量的高程数据(Noh和Howat,2015;Shean等,2016)。这些卫星影像器在每次轨道经过时对地面表面进行了成片扫描,生成的影像带长达200公里,宽度在11到17公里之间,具体取决于传感器(见表1)。为了便于数据处理,数据提供者在交付前将每条影像带分成大约方形的子集或场景,每个子集约有10%的重叠。选取了覆盖相同地面区域且具有大于10°的收敛角度、太阳高度角差异小于10°且时间间隔小于10天的影像对作为DEM立体对,以减少由于地面变化(如降雪或冰面运动)引起的误差。选用了相同传感器和不同传感器的影像对。通过偏离天顶的摄像机指向,我们成功地在接近88°S的平坦表面上获得了DEM。所有REMA产品均采用极地立体投影,中央经线为0°,标准纬度为-71°S,并参照WGS84椭球体。REMA工作流程的流程图见补充材料中的图S1。
解释:
REMA(南极参考高程模型)是通过四颗商业卫星拍摄的立体影像来制作的,这些卫星拍摄的图像被用来创建南极的高程数据。这些卫星拍摄的影像非常清晰,分辨率可以达到不到0.5米,使得科学家可以精确地计算出南极的地形高度。通过将不同角度的影像组合起来,科学家能够得到立体图像,从中提取出三维高程数据。
这些影像来自不同的卫星,并且每颗卫星拍摄时的角度和时间间隔都有严格的要求,以确保数据的准确性。如果影像的拍摄时间相差太大,或者表面发生了变化(比如雪下得太多),就可能影响数据的精度。所以,选择合适的影像对进行处理,可以减少这些误差。
REMA的高程数据精度非常高,特别是在冰雪覆盖的区域,能够得到清晰的地面高度数据。这些数据对科学研究非常重要,可以帮助研究人员了解南极冰盖的变化以及其他相关的环境变化。所有REMA产品的地图都是基于极地投影制作的,并且与全球的标准坐标系统相一致。
翻译:
2.1 DEM处理
DEM是通过使用开源的、完全自动化的SETSM软件包(Noh和Howat,2017)在美国国家超级计算应用中心(NCSA)的Blue Waters超级计算机上,从影像对中生成的。在进行DEM处理之前,WorldView 1和WorldView 2的影像使用Ames Stereo Pipeline软件包中的wv_correct功能进行去条纹处理(Shean等,2016)。SETSM生成的DEM通常在场景边缘出现伪影,这是由于在生成三角不规则网(TIN)和场景边界邻域过滤时缺乏约束。这些伪影表现为不现实的高地形,延伸到场景边缘几十到几百个像素。为了检测和去除这些边界伪影,我们计算了21像素大小方形区域内的平均坡度。然后,将那些平均坡度大于1的像素周围13像素半径内的所有像素移除。接着填补这些封闭的空洞,只保留触及场景边缘的空洞。小于1000像素的孤立簇也被去除。然后,我们使用凸包算法,包括数据空洞的凹形,应用到剩余的数据上,以定义裁剪后的场景边界。我们还使用在DEM提取过程中成功匹配的密度,过滤掉由云或不透明阴影造成的错误表面,并使用匹配标签文件中的匹配点密度场。我们通过计算21像素方形区域内成功匹配的比例来得出匹配点密度场。如果匹配点密度低于0.9,就会过滤掉这些像素。过滤后的场景DEM与相邻场景合并,形成DEM条带,涵盖原始立体影像条带的重叠区域,通过使用Nuth和Kääb(2011)以及Levinson等(2013)提出的迭代最小二乘法进行三维配准,并对重叠区域进行加权平均。由于云或水体等因素,广泛的错误表面可能会导致配准错误。因此,如果在重叠区域内配准场景的高程残差平方根大于1米,则不进行场景合并。在这种情况下,该条带被分割成单独的段,并在全局拼接步骤中作为独立的DEM进行处理。我们注意到,配准过程可能无法在极为平坦或均匀坡度的地形中提供正确的水平偏移,因为坡度和方向的变化范围较小,可能无法得出可靠的回归结果。然而,我们没有发现这种情况,表明在这些高分辨率(2–8米)下地面变化足够大,能够使得方法成功。根据2017年7月之前收集的所有南极影像档案,并且云层覆盖率低于20%,我们处理了79,362个独立的影像条带对,生成了187,585个DEM条带段,其中66,401个覆盖了西南极和东南极的山区,分辨率为2米,其余地区为8米分辨率(图1a)。通常选择对平坦冰盖表面区域使用较低的分辨率,以节省计算成本。这相当于总覆盖面积122,567,288 km²,包括重复覆盖,和98%的南极洲(包括位于60°S以北岛屿)的13,987,485 km²的覆盖。最大空白区域位于南极“极地空洞”,大约位于88°S以南,其余空白区域主要出现在山脉的阴影面和南极半岛等常年云层覆盖的地方。这些空白区域将在未来优先处理。
解释:
这段话讲的是如何处理南极的高程数据(DEM)。首先,科学家使用四颗卫星拍摄的影像,经过处理来生成高程数据。为了确保数据准确,他们首先去除了一些影像中的条纹,然后通过各种技术去掉了影像边缘的不真实的高地形部分。接着,他们还会去除云层或阴影导致的错误部分。
科学家们使用了一个叫SETSM的软件来处理这些影像数据,这个软件可以自动化地将影像转化为高程数据。这些数据会被合并成大块的高程图(DEM条带),并通过一种叫做“配准”的方法将重叠区域的数据对齐。如果合并的误差太大,就不会合并这些数据块,而是分成多个小块进行处理。
整个南极洲的影像数据处理完成后,科学家成功地为南极的大片区域生成了高精度的高程数据,这些数据的分辨率从2米到8米不等。总共覆盖了122万平方公里的区域,其中包括大部分的南极洲及其岛屿。少部分地方存在数据空白,这些空白区域会在未来优先处理。
翻译:
2.2 DEM条带质量控制和配准
每个DEM条带段都生成了阴影表现图,并通过视觉检查,根据图像质量进行分类(即没有由于云、阴影等导致的错误表面)。这些错误表面在阴影表现图中表现为与实际地形对比强烈的混乱纹理。如果在阴影表现图中没有发现错误表面,则接受该DEM条带;如果错误表面较小且孤立,则手动编辑以遮掩这些错误;如果错误太严重,无法编辑,则拒绝该DEM条带。在187,585个DEM条带段中,130,386个(占69%)进行了视觉检查和分类。剩余的31%的条带没有进行视觉检查,因为在质量控制过程中,我们从检查每个条带转为只检查需要拼接的条带,导致该变化后的部分地区检查的条带较少。在经过视觉检查的条带中,43,550个(占33%)通过了质量控制,19,971个(占15%)需要手动遮掩。总的来说,经过质量控制的DEM覆盖了55,491,482 km²的区域,覆盖了13,567,969 km²,即南极洲面积的95%(图1b)。所有条带都被垂直配准到通过CryoSat-2雷达和ICESat-1激光高度计系统(GLAS)2D观测获取的高程点云。ICESat-1 GLAS覆盖了南极洲86°S以北的所有区域,限于轨道约束,称为“极地空洞”。我们使用的是由国家雪冰数据中心(NSIDC)分发的ICESat-1 GLAS第二版(Level 2 GLAH12)高程数据(Zwally等,2014)。每个激光测量点的地面足迹直径约为70米,在平坦表面上的精度为±0.1米,受雪面属性的影响略有变化(Shuman等,2006)。2010年4月发射的CryoSat-2搭载了KU波段SAR/干涉雷达高度计(SIRAL),在其高分辨率干涉模式(SARIn模式)下,具有450米的纵向分辨率和1公里的横向分辨率。CryoSat-2的配准点通过SARIn模式下的最接近到达点(POCA)位置获得,这些位置是通过坡度阈值回退器(Gray等,2017)得出的。我们只使用SARIn模式数据,不使用低分辨率模式(LRM)的测量数据,因为我们认为在DEM条带的尺度上,LRM数据的坡度驱动误差无法可靠地平均为零。每个DEM条带经过平滑和下采样到32米网格间距,去除粗糙地形后,插值到CryoSat-2 SARIn模式的点云位置。对于CryoSat-2的配准,我们通过每个DEM中所有点的时间序列估算地表高度的线性时间趋势,使得每个高度点的测量值能够反映出DEM获取时的表面高度。由于ICESat-1数据的高程测量与DEM获取之间的时间间隔较大,我们没有对ICESat-1数据应用类似的时间依赖修正。此外,我们只在没有高质量CryoSat-2 SARIn模式数据的区域使用ICESat-1数据,这些区域通常是冰盖内流速较慢的区域,预计这些区域的表面高度变化在次十年时间尺度内小于重复测量的分辨率(例如,Helm等,2014)。DEM与高程点云之间的中位数差异提供了DEM的垂直偏差估算。对于CryoSat-2数据,只有在垂直偏差修正的1σ不确定性小于0.1米且残差标准差小于1米时,才会用于拼接。对于ICESat-1数据,我们设定残差标准差的最大阈值为0.35米,因为这些条带主要用于CryoSat-2低分辨率覆盖的平坦冰盖内地带。经过CryoSat-2注册的DEM覆盖了6,679,897 km²,总面积为29,901,958 km²,包括重复覆盖(图1c),而ICESat-1注册的DEM覆盖了4,897,600 km²,包括8,739,128 km²的重复覆盖(图1d)。如果条带同时有CryoSat-2和ICESat-1的注册数据,并且在偏差修正的不确定性阈值范围内,则可以估算CryoSat-2高度估算中的偏差,这些偏差可能由微波穿透雪层和冰层(即穿透深度)或由回退算法导致的偏差(即回退器在波形的前沿识别的点与实际表面不完全匹配)引起。我们假设ICESat-1激光高度计的1064纳米波长脉冲不会受到这样的偏差影响,因此,ICESat-1和CryoSat-2偏差修正之间的差异可以估算CryoSat-2的偏差。图2展示了ICESat-1和CryoSat-2在227条标准残差标准差小于0.25厘米的条带上的垂直偏差修正。这些条带分布在CryoSat-2 SARIn覆盖的整个区域,因此CryoSat-2和ICESat-1偏差修正之间的平均差异应该不受两次任务间表面高度变化的局部变异的影响。两者的平均差异为-0.39 ± 0.35米。我们预计CryoSat-2数据的偏差取决于表面密度和坡度(Wang等,2015),但我们没有简单的方法预测偏差,并且没有找到CryoSat-2和ICESat之间差异的明显空间或高度依赖性。因此,我们对CryoSat-2注册的高度添加了一个统一值0.39米,无论条带的位置和表面类型如何。
解释:
这段话讲的是如何检查和处理生成的南极高程数据(DEM)。首先,研究人员使用了阴影图(Hillshade图)来检查每个数据条带的质量,特别是是否有云、阴影等造成的错误。如果图像中没有明显错误,就直接接受这个条带。如果错误比较小,研究人员会手动修正,遮掩错误区域;如果错误太严重,就会舍弃这个条带。检查过的条带中,约33%通过了质量控制,15%需要修正,剩下的条带则没有检查。总的来说,95%的南极区域被成功地处理成高质量的高程数据。
为了确保数据的准确性,所有DEM条带都被垂直配准到来自CryoSat-2和ICESat-1的高精度激光测量数据上。这些测量数据可以帮助修正高程数据中的误差,特别是在冰层或雪层中的误差。研究人员通过比较CryoSat-2和ICESat-1的数据,估算了可能存在的误差,并做了修正。
通过这种方法,研究人员能够确保最终得到的南极高程数据具有很高的精度,可以用于进一步的研究和分析。
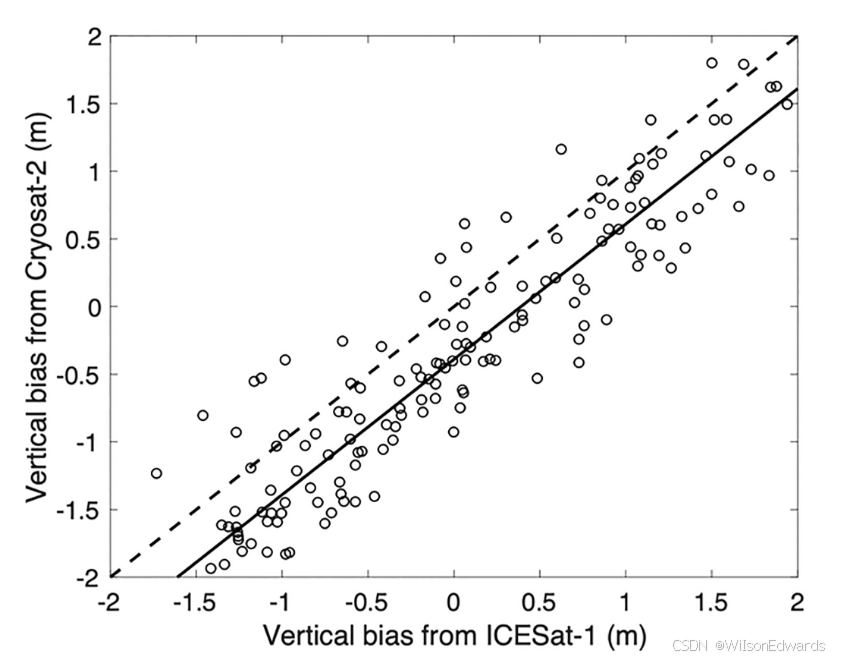
图 2. REMA 条带 DEM 与来自 ICESat-1 激光高度计和 CryoSat-2 雷达高度计的重叠点云之间的垂直偏差图(即残差的均值)。仅绘制残差标准差小于 0.25 米的条带。实线表示单位线,且已根据偏差的均值差(0.39 厘米)进行了平移。
解释:
这张图展示了REMA条带DEM(数字高程模型)和两个卫星的激光和雷达高度计测量数据之间的高度差异。具体来说,它显示了这些高度差异的平均值(即垂直偏差)。只有那些误差较小(残差标准差小于0.25米)的条带被展示。图中的实线代表理想情况下的零误差线,但它已经根据偏差的平均值(大约0.39厘米)进行了调整,这意味着图中的实线是基于实际数据的一个“修正”版本。
- 拼接
经过质量控制的条带 DEM 被拼接成 100 km × 100 km 的瓷砖,每块瓷砖的四周有 1 km 宽的缓冲区,以便进行条带之间的核心配准和羽化处理。对于每个瓷砖,首先添加与高程计配准的条带,按垂直误差升序排列,并对条带边界应用加权线性羽化处理。每个像素的误差值是根据与高程计配准的残差计算的标准误差,日期戳表示 DEM 获取的日期。±0.35 米的偏差误差不包括在 CryoSat-2 注册瓷砖的误差估计中。在条带边缘已经羽化的区域,误差和日期戳会与高程一起按相同的加权方法进行平均。所有已注册的条带添加完成后,未注册的条带会被加入以填补空缺,并与拼接中的现有注册数据进行核心配准。每个质量控制过的未注册条带,在覆盖数据空缺的区域,会使用 Nuth 和 Kääb(2011)算法测试三维配准的精度,选择配准误差最小的条带(定义为拼接 DEM 和配准 DEM 高程差的均方根)来填补空缺,并应用配准偏移。再次对条带边缘应用加权羽化进行平滑。如果瓷砖中有 CryoSat-2 注册数据,则使用这些数据,忽略任何 ICESat-1 注册数据。如果没有 CryoSat-2 或 ICESat 注册数据,首先添加覆盖瓷砖区域最多的质量控制条带,并作为相对参考。然后,未注册的条带按上述方法与拼接数据核心配准后加入。图 3 显示了与 CryoSat-2、ICESat-1 或邻近瓷砖对齐的注册瓷砖分布。
解释:
这段文字描述了将不同的 DEM 数据拼接成较大区域的过程。首先,所有经过质量控制的条带 DEM 被拼接成 100 km × 100 km 的瓷砖,并且每块瓷砖的边缘加了 1 km 的缓冲区,以便于后续的配准和拼接处理。拼接时,首先添加那些已与高程计数据(如 CryoSat-2 或 ICESat-1)对齐的条带,按误差大小顺序排列。为了避免拼接痕迹,还在条带边缘使用了羽化处理,使不同条带的过渡更平滑。
每个像素的误差由与高程计数据对齐时的残差计算得出,这样能为每个数据点提供一个误差值,并且每个瓷砖都有相应的获取日期。对于 CryoSat-2 数据,±0.35 米的误差没有被算入。所有已注册的条带拼接完成后,如果还有空缺区域,就会加入未注册的条带,这些条带会根据之前拼接好的数据进行配准。未注册条带通过三维配准算法(Nuth 和 Kääb 2011)测试并选择配准误差最小的条带来填补空缺区域。
如果 CryoSat-2 数据在瓷砖中已有注册数据,就使用这些数据;如果没有 CryoSat-2 或 ICESat-1 数据,那么会选择覆盖范围最大、质量已控制的条带作为参考。最后,所有未注册的条带也会按照相同的方法进行配准,并加入到拼接的 DEM 中。
翻译:
冰盖边缘和 CryoSat-2 SARIn 模式采集区域的瓷砖大多与同步的 CryoSat-2 高程计数据进行了配准,只有一些海岸线区域因为陆地面积过小或有大量裂缝,导致无法成功配准。大部分内部瓷砖则与 ICESat-1 数据配准,因此它们的日期戳为 2008 年 12 月底,尽管在这些区域上,预期在不到十年的时间尺度上几乎没有表面高程变化(例如,Helm 等,2014)。一些没有配准的瓷砖,通过与邻近瓷砖对齐进行了配准,这些瓷砖通常位于极地孔洞附近及其东北方的狭窄区域。大多数情况下,缺乏配准是由于配准误差超过了第 2.3 节定义的阈值,可能是因为卫星需要极大的偏离天顶角才能在南极地区获取立体图像。瓷砖边缘进行了羽化处理,以平滑任何偏差。最后,我们使用英国南极调查局(BAS)的陆地-冰分类多边形应用了海岸线掩模(https://add.data.bas.ac.uk/,最后访问日期:2019 年 2 月 13 日)。由于这条海岸线的分辨率较低(几十到几百米),且在某些区域与 REMA 数据不完全匹配,因此我们将海岸线 800 米内、低于本地平均海平面 2 米的区域标记为水域。改善海岸线的划定是 REMA 未来版本的目标之一。REMA 拼接图包括基于高程计配准的垂直误差估计;与邻近瓷砖对齐的核心配准;以及数据获取日期的网格(图 4)。误差的第 68 和第 90 百分位分别为 0.63 米和 1.00 米。误差在较为崎岖的地形(如南极半岛和跨南极山脉)中较大。在海岸线的裂缝区域和通过邻近对齐注册的瓷砖中,误差也较大,这些误差是从邻近数据传播而来。CryoSat-2 SARIn 掩膜区域的误差最小。
解释:
这段话解释了 REMA 拼接过程中如何处理不同的数据来源。对于冰盖边缘和 CryoSat-2 采集区域的瓷砖,大部分已经通过与 CryoSat-2 的高程数据对齐来修正,但是有些海岸区域因为没有足够的陆地或因为裂缝太多,导致无法正确配准。大部分内部区域的瓷砖则通过与 ICESat-1 数据对齐来修正,它们的日期大多为 2008 年底,因为在这些区域,高程变化非常小。
有一些瓷砖没有配准,这些瓷砖通过与邻近的瓷砖对齐来填补空缺。这些空缺区域通常在极地附近,卫星需要大角度的观测才能拍摄到南极地区的立体图像。为了让拼接更自然,瓷砖的边缘会进行羽化处理,避免明显的接缝。
为了避免错误地识别海岸线,科学家使用了一个海岸线掩模,并且标记了海岸线周围 800 米内、低于海平面 2 米的区域为水域。REMA 拼接数据也提供了误差估计,误差在不同区域有所不同:在崎岖的地方误差较大,而在较平坦的地方误差较小。
翻译
REMA 的平均时间标注为 2015 年 5 月 9 日,标准差为 432 天。拼接过程未出现系统性的时间分布模式,但较新的数据通常覆盖高纬度地区,而较旧的数据则覆盖了由于长期目标而具有高科学价值的区域。我们在第 2.3 节中描述的利用 CryoSat-2 高程数据对 DEM 进行校准的方法,能够考虑高程测量和 DEM 获取时间之间的差异,从而为快速变化的海岸和流速较快的区域提供时间约束。尽管许多内陆的 DEM 是基于 2008 年末的 ICESat-1 数据校准的,但我们在时间标注中保留了条带数据的获取时间,因为预计这些区域的时间依赖性变化相较于数据误差较小(例如,Helm 等,2014)。对于局部变化区域,例如亚冰湖上方的变化,影响应该很小,不会显著影响拼接块的校准。然而,在评估基于 ICESat-1 校准的拼接块时,应格外谨慎。通过与邻近区域对齐校准的拼接块被赋予邻近缓冲区数据的加权平均时间。
此外,我们利用现有的低分辨率 DEM 填补了 REMA 镶嵌图 100 m 和更低分辨率版本中的空缺。在南极半岛区域,我们使用了由 Cook 等(2012)编辑的 100 m ASTER GDEM 镶嵌图。而在南极洲的其他部分,我们采用了 Helm 等(2014)的数据。填补过程通过将低分辨率 DEM 重新投影和线性重网格化到 REMA,计算低分辨率 DEM 与 REMA 数据重叠区域的差异,然后通过调整 DEM 的差异来填充空缺。然而,这种方法在地形陡峭的地区以及条带边缘误差通过插值传播到空缺中时,可能导致伪影。这些问题将在未来版本的 REMA 中通过新增影像来填补空缺加以改正或去除。
REMA 镶嵌图 DEM 的分辨率实例在图 S2、S3、S4 和 S5 中提供。REMA DEM 的两个常见伪影分别是由于不透明阴影导致的噪声表面和由冰运动引起的水平偏移表面特征重复。阴影伪影通常出现在山脉的南侧条带和镶嵌图中,表现为粗糙表面。阴影会降低 DEM 生成软件中立体影像对匹配算法的可信度,从而导致噪声表面。图 S6 提供了阴影伪影的示例。鬼影伪影仅出现在镶嵌图中,这是由于叠加多个重叠的 DEM 引起的,最常见于快速移动的冰川和冰架上,在裂隙和冰流中的表现尤为明显。这种伪影表现为重复的偏移特征,并可能因拼接过程中应用的羽化处理而逐渐淡入或淡出。图 S3 和 S7 提供了冰架裂缝鬼影的示例。
解释
这段话主要说的是,科学家制作了南极地形图(REMA),但是因为各种原因,会有一些不够完美的地方和处理方法:
-
数据时间的分布:
- 地图的平均时间大约是 2015 年,但不同地方数据采集的时间并不完全一样。
- 越靠近南极的地方用的是新一点的数据,而靠近南极大陆内部的地方用的是较旧的数据。
-
时间校准:
- 科学家用 CryoSat-2 和 ICESat-1 卫星的数据校准了地形数据,考虑到了时间上的差异。这可以更好地处理一些快速变化的地方,比如冰川流动快的区域。
- 内陆变化较小的地方即使用的是旧数据,影响也不大。
-
如何填补空缺:
- 有些地方的数据缺失,科学家就用其他分辨率较低的地图来填补,比如南极半岛用了一张叫 ASTER 的地图,其他地方用了另一张地图。
- 但这个方法在陡峭的山地和条带边缘可能会有一些问题,比如数据看起来不太自然。
-
常见问题和伪影:
- 阴影问题:在一些山的南侧,由于光线不足,影像处理算法不太准确,会出现表面看起来很粗糙的现象。
- 鬼影问题:在一些冰川和冰架上,数据叠加时会出现重复的“重影”效果,尤其是在冰运动较快的地方。这种现象像图片上有“重叠的影子”。
-
未来改进:
- 科学家计划在未来版本中用更多新影像填补空缺,改进这些问题。
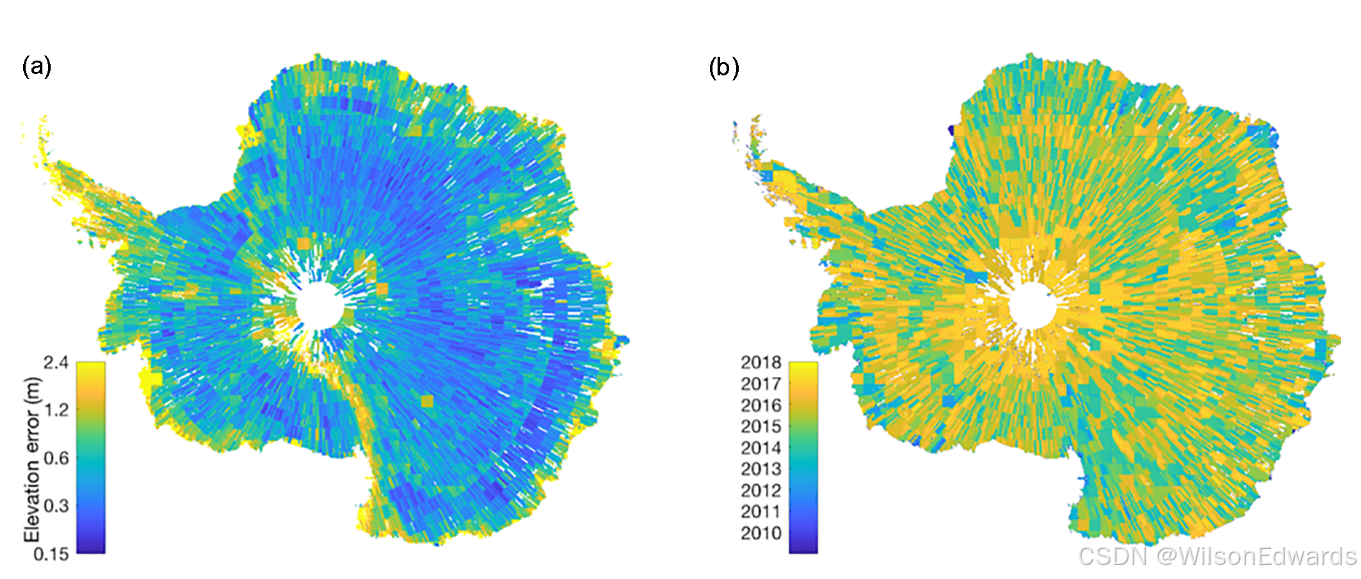
图4. REMA的地图:(a) 高程误差图,通过 DEM 和卫星高度计数据之间的高程差的均方根得到,或者在对齐的情况下,通过 co-registered DEM 之间的差异得到(注意颜色尺度是对数尺度);(b) 日期戳图,显示的是图像采集的日期。
解释:
这段话讲的是 REMA 地图中的两张重要图:
-
高程误差图:这张图展示了地图上高程的准确性。高程误差是通过对比 DEM(数字高程模型)和卫星测量的高度数据(比如用激光或雷达测量的)计算出来的。图中的颜色代表了高程误差的大小,颜色使用的是对数尺度,意味着某些区域的误差可能非常大,而其他地方的误差较小。
-
日期戳图:这张图展示了每个区域的数据采集日期。每一块区域上标的日期告诉我们这部分地图数据是何时拍摄的。
简单来说,这两张图帮助我们了解地图的准确性以及数据的时间背景。
翻译:
- 与“冰桥行动”机载激光雷达高度计的比较
我们通过与美国国家航空航天局(NASA)“冰桥行动”(Operation IceBridge, OIB)在2009到2017年间采集的机载激光雷达高度计数据进行独立验证,以验证 REMA 条带 DEM 和拼接 DEM 的准确性。提供了三种不同激光雷达系统的数据:空中地形测量仪(ATM)、陆地、植被与冰雪传感器(LVIS)和 ICECAP 激光雷达系统。ATM 是一个锥形扫描的激光雷达,波长为531 nm,频率为5 kHz,标称探测点大小为1米,单次测量精度为±0.1米(Martin 等,2012年)。LVIS系统是一个高空激光雷达,波长为1064 nm,频率为500 Hz,探测点大小为20-25米,垂直精度与ATM类似(Hofton等,2008年)。ICECAP 激光雷达操作波长为905 nm,沿轨道方向分辨率为25米,跨轨道方向为1米,精度为0.12米(Young等,2015年)。所有数据均来自国家雪冰数据中心(https://nsidc.org/,最后访问日期:2018年11月5日)。对于ATM数据,我们使用了Level 1B高程数据产品;对于LVIS和ICECAP,我们使用了Level 2地理定位高程产品。所有激光雷达数据均为WGS84椭球体参考的地理坐标,已转换为REMA极地立体投影。我们选择了与REMA条带采集日期或拼接日期戳相差不超过18个月的激光雷达数据。然后,我们将条带数据与每个激光雷达点云进行三维对准,垂直残差用于提供精度估计。图5显示了激光雷达系统和对准条带之间的垂直残差的绝对值的68百分位数和90百分位数的直方图,或者称为线性误差(LE)。ATM、LVIS和ICECAP激光雷达系统的68百分位数中位数分别为0.44米、0.48米和0.52米,90百分位数中位数分别为0.84米、0.98米和1.01米。这些值与Shean等(2016年)使用相同影像创建的DEM数据结果相似,但比在格林兰岛海岸使用ATM与2米数据的比较结果(约0.3米)大,这可能是由于分辨率差异和所使用的激光雷达与DEM数据集质量控制不如前者严格。对异常值的检查表明,误差通常来源于云层和激光雷达数据及DEM中的其他问题。因此,我们的数据支持Noh和Howat(2015年)的发现,即从无云图像生成的DEM,具有足够的照明和适当的基高比,其内部精度与现有的机载激光雷达数据相当(即,对于单个DEM在不同位置的比较)。
解释:
这段话主要讲的是通过与“冰桥行动”提供的机载激光雷达数据进行比较,来验证 REMA 数据的准确性。为了验证 REMA 数据是否准确,研究人员将它与来自不同激光雷达设备(ATM、LVIS和ICECAP)收集的数据进行了比对。每种激光雷达设备的精度和探测范围不同,结果显示 REMA 的高程数据与这些设备的测量结果非常接近,误差较小。
简而言之:
- 三种激光雷达设备:这些设备分别用来测量南极地区的地面高度,每个设备有不同的探测精度。
- 验证 REMA 数据:研究人员通过与这些设备的数据比较,确认了 REMA 数据的准确性。
- 误差:误差的大小大致在0.3米到1米之间,可能是由于一些外部因素,如云层或者设备误差造成的。
- 总结:研究表明,REMA 数据与激光雷达测量的数据非常接近,证明它是可靠的,尤其是那些没有云层干扰的清晰图像。
这意味着我们可以放心地使用 REMA 数据来研究南极地区的地形变化,因为它的精度非常高,误差很小。
翻译:
对于拼接后的图块,这些图块是通过前述的拼接过程与卫星高度计数据对准的,我们将REMA网格线性插值到每个重叠激光雷达数据点的中心坐标,这些数据点是在REMA数据采集后一年内收集的,然后计算插值后的REMA高程与激光雷达高程之间的差异。接着,我们计算每个图块中所有点差异的中位数,以及它们的绝对值的68百分位数和90百分位数(分别称为线性误差LE68和LE90)。这些值的直方图显示在图6中,而中位数和均方根误差则在图7和图8中进行映射。REMA高程的中位数值比ATM和LVIS高出0.06米和0.47米,比ICECAP低0.16米,而LE68的值分别为1.04米、1.19米和0.77米,LE90的值分别为1.78米、1.74米和1.25米,分别对应ATM、LVIS和ICECAP。ICECAP数据的较低误差值是可以预期的,因为这些数据主要来自东南极的低坡地。我们没有发现坡度与误差之间存在显著关系。然而,在图7和图8中显示的中位差和均方根误差值与图4a中CryoSat-2和ICESat-1的对准误差大致一致,最大误差通常出现在海岸的裂缝和裂谷区、南极半岛的高山地区,以及通过对准拼接的图块区域(如极地附近)。与这些条带比较一样,图块的比较也揭示了激光雷达数据中的一些误差,这些误差可能是由云层和飞机定位误差造成的。
解释:
这段话讲的是研究人员如何进一步验证REMA数据的准确性,特别是对于拼接后的图块数据。为了做到这一点,他们将REMA网格数据与激光雷达数据进行比较,并计算它们之间的差异。具体方法是:
- 插值和对比: 研究人员将REMA的高程数据插值到激光雷达数据点的中心,并计算REMA和激光雷达数据之间的差异。
- 计算误差: 他们计算了这些差异的中位数(即差异的典型值),并进一步计算了68和90百分位的误差值,分别叫做线性误差LE68和LE90。
- 结果分析: 结果显示,REMA的高程在中位数上比ATM和LVIS的高程高,而比ICECAP的高程低。误差的大小在不同的激光雷达数据之间有所不同,特别是ICECAP数据的误差较小,这与其采集的地区(东南极的低坡地)有关。
- 误差分布: 最大的误差通常出现在南极的海岸、裂缝区域和高山地区,另外,一些误差可能是由于云层和激光雷达设备定位的误差导致的。
简单来说:
- 拼接数据的对比: 研究人员通过将REMA数据和激光雷达数据对比,来检查REMA高程数据的精确度。
- 误差计算: 他们计算了这些数据之间的差异和误差,结果表明,REMA数据和激光雷达数据非常接近,误差通常在0.3米到1.8米之间。
- 误差来源: 误差的来源可能是云层、飞机定位问题等因素。
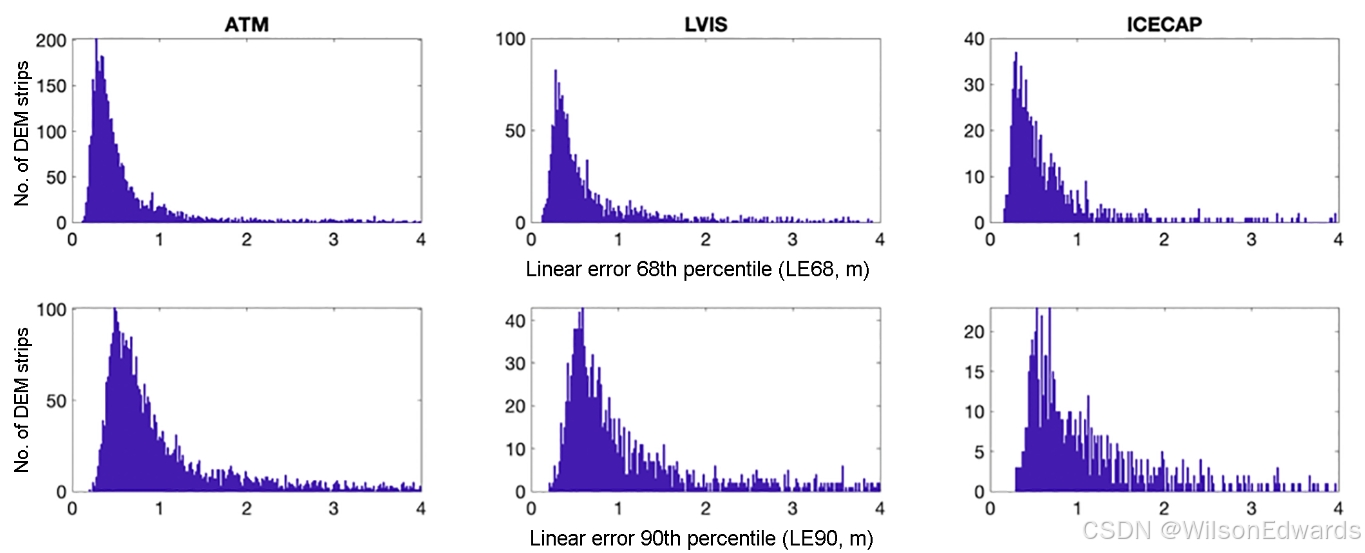
图5. DEM条带的验证结果。每个Operation IceBridge激光雷达系统与REMA DEM条带对准后的垂直残差(或线性误差)绝对值的68和90百分位数的直方图。
解释:
这段话讲的是图5展示了三种不同激光雷达系统与REMA DEM条带对比后的验证结果。具体来说,图中展示了两组数据:一种是垂直残差的68百分位数,另一种是90百分位数。这些数据用来表示不同激光雷达系统和REMA DEM条带对比时,高程误差的大小。
简单来说,图5显示了通过比较激光雷达数据和REMA DEM数据,计算出来的误差范围,特别是最常见的68%和90%的误差值。
翻译:
- 数据集属性
REMA数据集包括所有单个DEM条带(在第2.3节中描述)和以100 km × 100 km为单位的马赛克图(第3节),所有数据均为32位浮点栅格文件,格式为GeoTIFF。条带DEM的分辨率根据区域不同为2米或8米(见图9),并包含一个元数据文本文件,提供版本、投影和处理信息。在当前版本(版本1)中,条带DEM没有应用地面控制或高度计注册。版本1包含66,401个2米分辨率的条带DEM和121,184个8米分辨率的条带DEM,总体积为45TB未压缩。马赛克图的分辨率统一为8米,并且已与卫星高度计数据进行配准,具体过程在第3节中描述。每个马赛克图块包括错误估计和日期文件,均为GeoTIFF格式,具体描述如下。错误文件具有32位浮点精度,而日期文件则使用16位整数精度,单位为自2000年1月1日以来的天数。8米图块没有应用空洞填充。版本1包括1524个马赛克图块,总体积为1.0TB未压缩。除了8米图块外,还提供了分辨率为100米、200米和1千米的降分辨率重采样版本。降分辨率数据集有一个替代填充版本。PGC提供的未标注和带标注的完整马赛克DEM阴影表示图的预览图显示在图S8和S9中。完整分辨率的地图可以通过以下链接访问:http://maps.apps.pgc.umn.edu/id/2364 和 http://maps.apps.pgc.umn.edu/id/2365(最后访问时间:2019年2月13日)。
解释:
REMA数据集包含了两种类型的地形图:单个的条带DEM和拼接在一起的大图(马赛克图)。这些图都是使用32位浮点数表示的栅格图文件,格式为GeoTIFF。
-
条带DEM:这些地形图有两种分辨率,2米和8米,具体取决于地区。条带的DEM数据没有做地面控制或高度计校准,目前发布的是版本1。版本1一共包含66,401个2米分辨率和121,184个8米分辨率的条带DEM,数据总量为45TB。
-
马赛克图:马赛克图的分辨率统一为8米,并且这些图已经与卫星高度计数据进行了配准。每个马赛克图块都包含了错误估计和日期信息。日期信息记录了图像的采集时间,而误差文件则显示了高度的误差范围。马赛克图没有做空洞填充(即未填补数据中的空白部分)。
除了这些8米的高分辨率图,REMA数据集还提供了100米、200米和1千米分辨率的降分辨率版本,并且这些低分辨率版本也有填补空洞的版本。
PGC还提供了这些图的预览版本,你可以通过链接查看完整分辨率的地图。
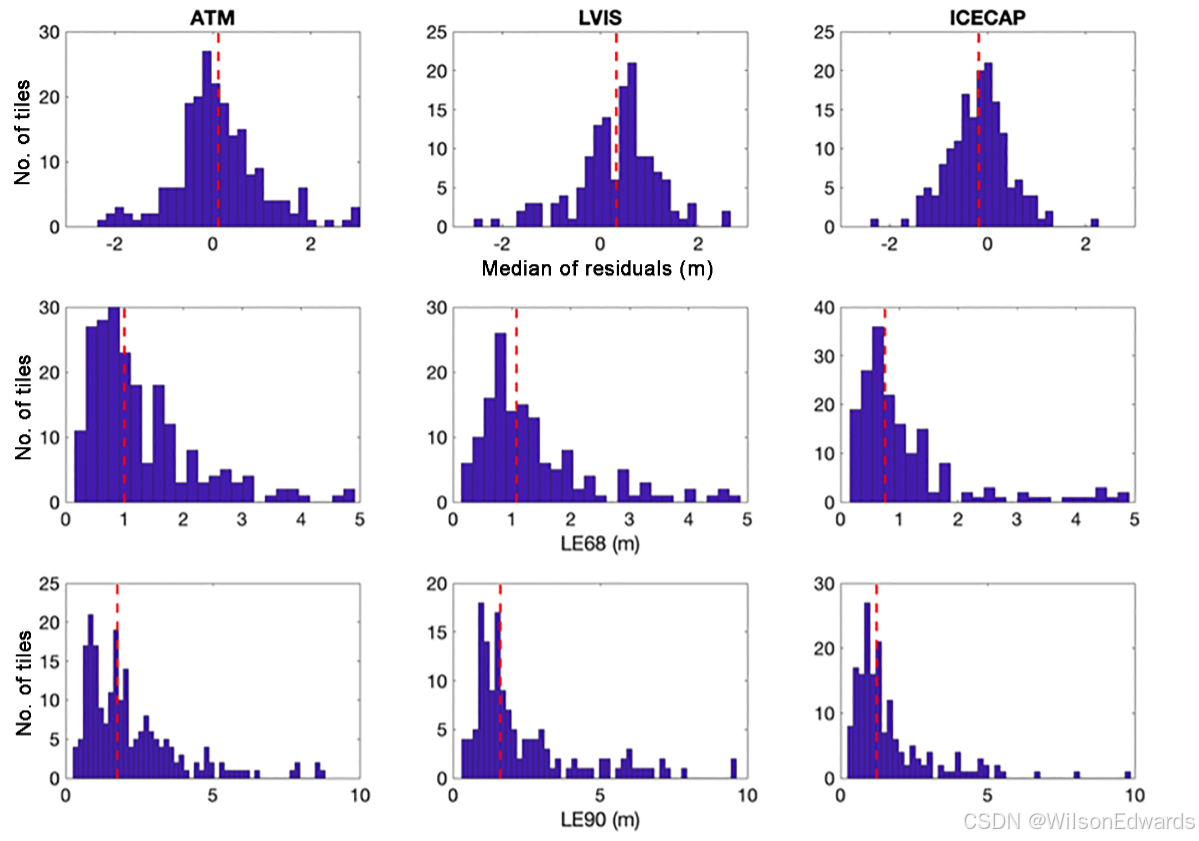
图6. 拼接图块的验证结果。显示了每个REMA图块与三个NASA OIB空中激光高度计之间差异的中位数和线性误差(在68th和90th百分位上的误差,LE68和LE90)的直方图。高度计的高程值从REMA的高程值中减去,因此正的中位数表示REMA高程值高于高度计测量值。
解释:
图6展示了REMA大地图上每一块拼接图的验证结果。我们把这些拼接图的高程(比如山的高度)和NASA的飞机激光测量数据做了比较。然后统计出它们之间的差别。
- 中位数:就是找到一组数据的“中间值”,帮助我们了解大多数数据的情况。
- 线性误差:表示REMA地图和激光测量之间的差别,误差越小,说明地图越准确。68%和90%的误差是指大多数误差落在这两个范围内。
如果REMA的高度比激光测量的高度高,那么差值就是正的,反之则为负。这些结果帮助我们了解REMA地图的准确度,以及哪些地方可能有更大的误差。
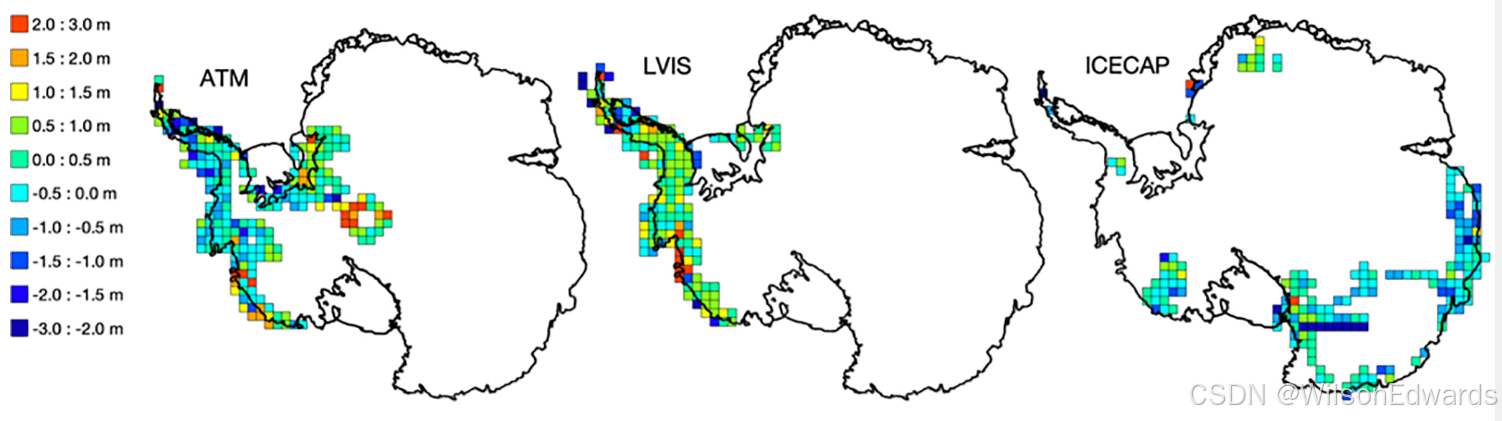
图7. 每个拼接图块的高程差的中位数,比较了REMA和三个NASA“冰桥行动”(Operation IceBridge)激光雷达系统的差异。只使用了采集时间相差不超过1年的数据。
解释:
图7显示了REMA地图和三个NASA激光雷达测量系统之间的高程差异的“中间值”。这里的“中间值”是指当我们把所有的高程差按大小排序时,正好处于中间位置的那个值。为了确保数据比较准确,只有那些测量时间相差不超过一年的数据被使用。这有助于更精确地比较REMA地图和激光雷达数据的高程差异。
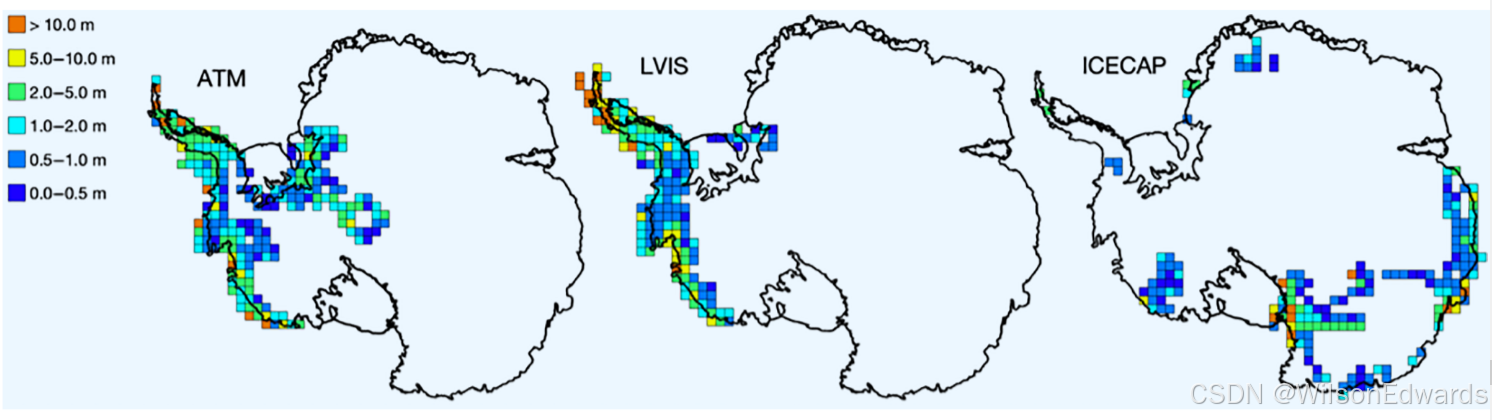
图8. 每个拼接图块的点高程差的均方根,比较了REMA和三个NASA“冰桥行动”(Operation IceBridge)激光雷达系统的差异。只使用了采集时间相差不超过1年的数据。
解释:
图8显示了REMA地图和三个NASA激光雷达测量系统之间高程差异的“均方根”值。均方根是指将所有的高程差的平方平均后再开根号得到的值,它能够反映出高程差异的大小。为了保证比较的公平性,图中的数据只包括那些采集时间相差不超过一年的测量结果。这个指标有助于我们了解REMA地图和激光雷达数据之间差异的整体情况。
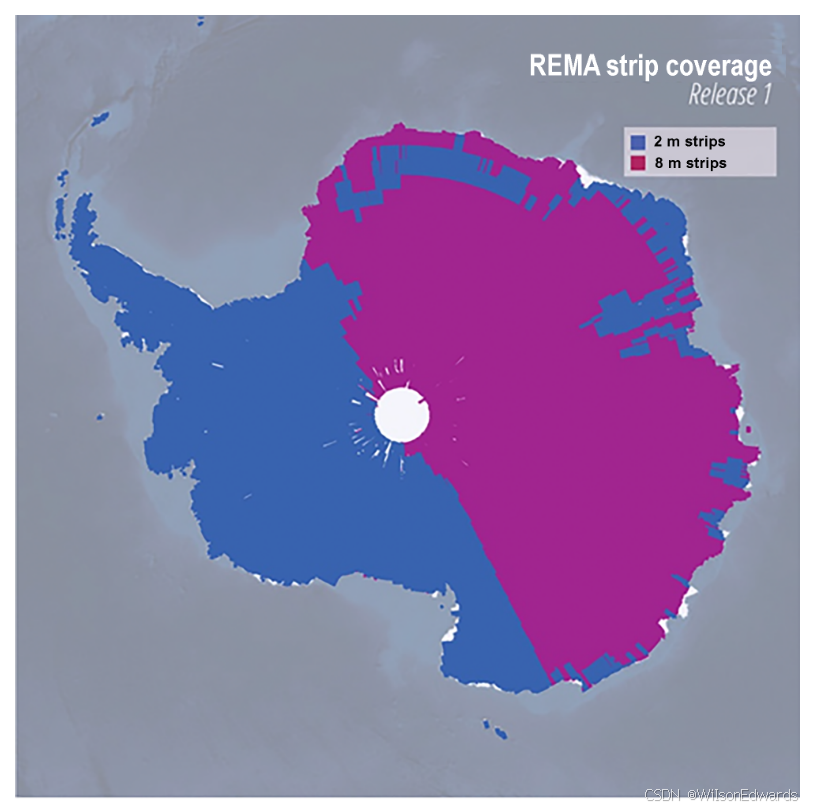
图9. 显示REMA版本1发布中2米和8米分辨率的DEM条带覆盖范围的地图。
通俗解释:
图9展示了REMA版本1中的DEM数据条带,它们有两种不同的分辨率:2米和8米。图中的地图告诉我们,这些不同分辨率的数据覆盖了哪些区域。2米分辨率的条带能提供更精细的细节,而8米分辨率的条带覆盖的区域更广泛,但细节相对较少。
翻译:
- 结论
通过高分辨率商业卫星影像的立体摄影测量,首次实现了对几乎整个大陆的高程绘制,水平分辨率低于10米,垂直误差低于1米。REMA的构建展示了卫星测高技术(包括激光或雷达)和立体DEM的高度互补性;测高技术提供了高精度但相对稀疏的控制点,而立体DEM则提供了类似精度但精确度较低的连续表面。两者的结合提供了一种有效的方法,最大化了解析度、覆盖范围和精度。南极洲的地理位置、冰盖的平坦性和缺乏植被,使其成为这些方法应用的最简单案例。极地轨道卫星因影像需求较少,提供了最丰富的数据。冰盖的平坦性和缺乏植被简化了与卫星测高的配准及树冠与地面高度的歧义问题。将这些方法扩展到低纬度时,这些复杂因素需要加以考虑。
数据可用性:上述所有REMA产品均可通过美国极地地理空间中心公开获取,网址为:https://www.pgc.umn.edu/data/rema/(Howat等,2019)。用于生成REMA DEM的影像可以通过请求提供给美国联邦资助的研究人员。
补充材料:与本文相关的补充材料可在线获取,网址为:https://doi.org/10.5194/tc-13-665-2019-supplement。
作者贡献:IMH构思了本研究,编写了滤波、配准和镶嵌软件,并进行了验证分析;CP管理了数据生产工作流程;BES进行了CryoSat-2的配准;MJN编写了DEM提取软件,并协助数据生产;PM协助了数据访问和生产;所有作者共同参与了论文的准备。
利益冲突:作者声明没有利益冲突。
致谢:本研究得到了美国国家科学基金会极地项目办公室的资助,Ian M. Howat获得了1543501号资助,Paul Morin获得了1559691号资助。高性能计算资源由伊利诺伊大学超级计算中心提供。
编辑:Etienne Berthier
审稿人:Jonathan Bamber和两位匿名审稿人
解释:
这段话总结了REMA数据集的工作。通过使用卫星影像和高科技工具(如激光测高和立体摄影测量),科学家首次完成了对几乎整个南极洲的高精度高程地图绘制。REMA数据的构建方法结合了卫星测量和立体图像的优点,使得数据既有高分辨率,又覆盖面广,精度高。南极洲因为冰层平坦、没有太多植被,成为应用这些方法的理想地方。卫星能够获取大量的数据,因此测量的精度很高。不过,将这些方法应用到低纬度地区时,还需要考虑更多的挑战。
此外,REMA的所有数据和图像都是公开的,研究人员可以申请获取。最后,文章还介绍了项目的资助来源和参与人员。



















 1069
1069

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











