







 本文介绍了傅里叶变换(FFT)在雷达工程中的应用,特别是在3D-FFT算法中用于天线维度的相位转换和DOA估计算法。通过仿真结果表明,FFT测角效果与DBF测角类似,阵元数量对角度分辨率和精度有显著影响。
本文介绍了傅里叶变换(FFT)在雷达工程中的应用,特别是在3D-FFT算法中用于天线维度的相位转换和DOA估计算法。通过仿真结果表明,FFT测角效果与DBF测角类似,阵元数量对角度分辨率和精度有显著影响。
文章目录
一、 算法简介
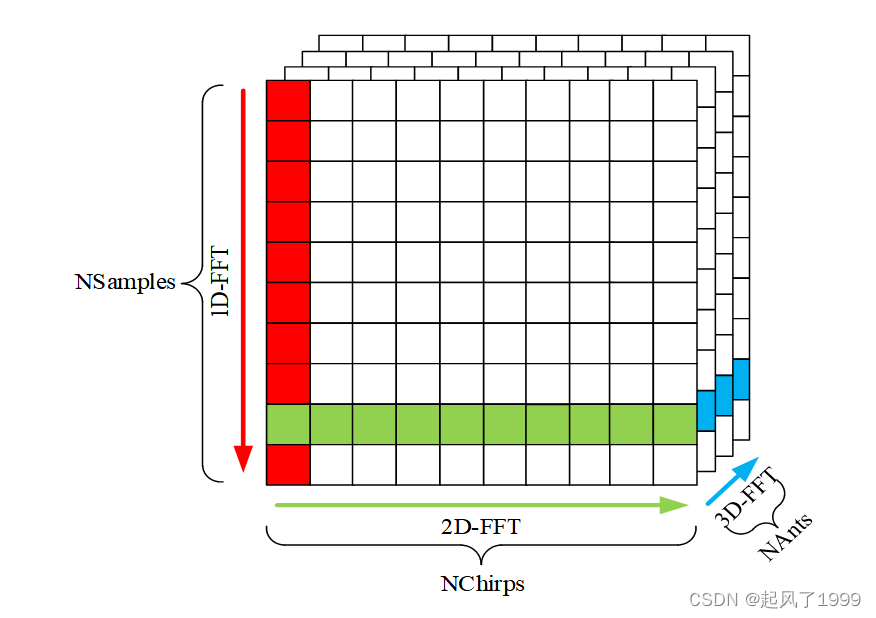
傅里叶变换(FFT)算法,在时频转换中广泛应用,同样可以用于在空域进行相位转换。其算法形式与波束成形算法相似,通过计算阵列功率幅值的峰值,可以获取相应的到达角。在工程应用中,对雷达原始数据进行三次FFT变换,分别得到距离、速度和角度信息,这被称为1D-FFT、2D-FFT和3D-FFT。在此背景下,3D-FFT表示对天线维度执行FFT算法,具体示意如图3.14所示。
DOA估计算法是在1D-FFT和CFAR目标检测之后处理的,3D-FFT算法的输入可表示为:

在上述表达中,A代表信号幅值,φ表示相对于基准点接收信号的相位差,d为线阵间隔,N为天线的阵列数,θ表示目标相对于天线法线方向的夹角。
基于3D-FFT输入信号表达式,在已知阵元数N、相邻阵元间隔d=λ/2、波长λ的条件下,只需通过FFT算法估算出信号幅值的峰值,即可对应得到到达角的估计值。
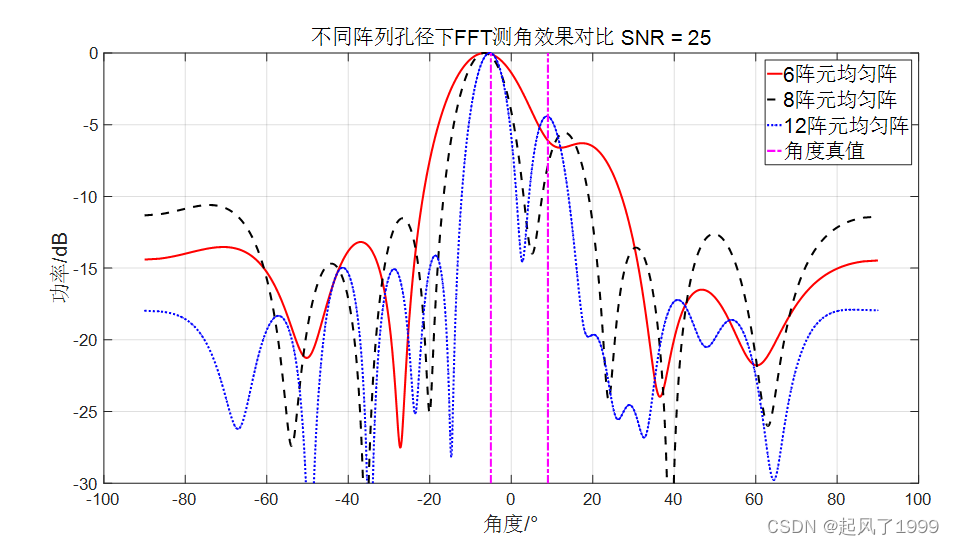
仿真参数采用与DBF测角算法相同的参数,详见表3.2。仿真结果如图3.15所示。观察可知,FFT测角效果与DBF测角效果基本相似,而阵元数量则是影响雷达角度分辨率和精度的主要因素。

















 4009
4009

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









