







 超级会员免费看
超级会员免费看
无人机飞控三大算法:
捷联式惯性导航系统
卡尔曼滤波算法
飞行控制PID算法
01
捷联式惯性导航系统
说到导航,不得不说GPS,他是接受卫星发送的信号计算出自身位置的,但是当GPS设备上方被遮挡后,GPS设备无法定位了。比如在室内、隧道内、地下等场所,基本收不到GPS信号。
另一种导航方式是不依赖外界信息的,这种导航叫做惯性导航。
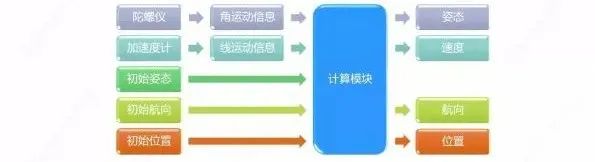
那什么是惯性导航呢?它就是利用载体上的加速度计、陀螺仪这两种惯性元件,去分别测出飞行器的角运动信息和线运动信息,与初始姿态、初始航向、初始位置一起交给计算模块,由计算模块推算出飞机的姿态、速度、航向、位置等导航参数的自主式导航方法。
惯性导航系统又分为平台式惯性导航和捷联式惯性导航。
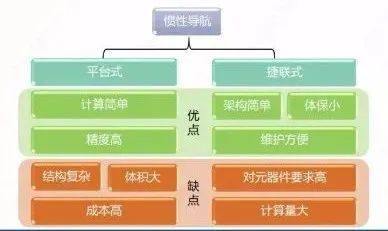
1)平台式惯性导航
早期的惯性导航系统都是平台式的,平台式惯导有实体的物理平台,陀螺仪和加速度计置于由

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











