







本教程只适用于
已经刷好机的nx,并且 jetpack版本为4.5.1,配合
librealsense的版本为v2.50.0,realsense-ros的版本为v2.3.2,主要解决的问题是d435i相机不输出imu消息。其他版本基本都测试过了,只有这个版本的d435能输出imu。
如果不知道如何刷机的可以参考我前面的教程:
(一)jetson xavier nx刷机(可稳定运行D435i相机,解决D435imu没有输出的问题)
主要参考教程是官方的安装手册:
librealsense installation_jetson
realsense-ros README
有问题的话可以评论区留言
一、安装librealsense SDK
(1)首先下载librealsense v2.50.0并修补内核
git clone -b v2.50.0 https://gitcode.com/IntelRealSense/librealsense.git
然后进入安装目录
cd librealsense
运行内核修补编译的指令,可能会有一点慢,如果失败的话反复执行,直到下好(我当时是刚刷好机,没有换镜像,用自带的镜像下的好像挺快的,但是换了国内的很慢还可能失败,所以建议用自带的源)
./scripts/patch-realsense-ubuntu-L4T.sh
修补完后会显示:
(2)安装依赖:
sudo apt-get update && sudo apt-get upgrade
sudo apt-get install git libssl-dev libusb-1.0-0-dev libudev-dev pkg-config libgtk-3-dev -y
(3)编译安装SDK
进入librealsense目录依次执行(失败的话反复执行)
./scripts/setup_udev_rules.sh
mkdir build && cd build
cmake .. -DBUILD_EXAMPLES=true -DCMAKE_BUILD_TYPE=release -DFORCE_RSUSB_BACKEND=false && make -j$(($(nproc)-1)) && sudo make install
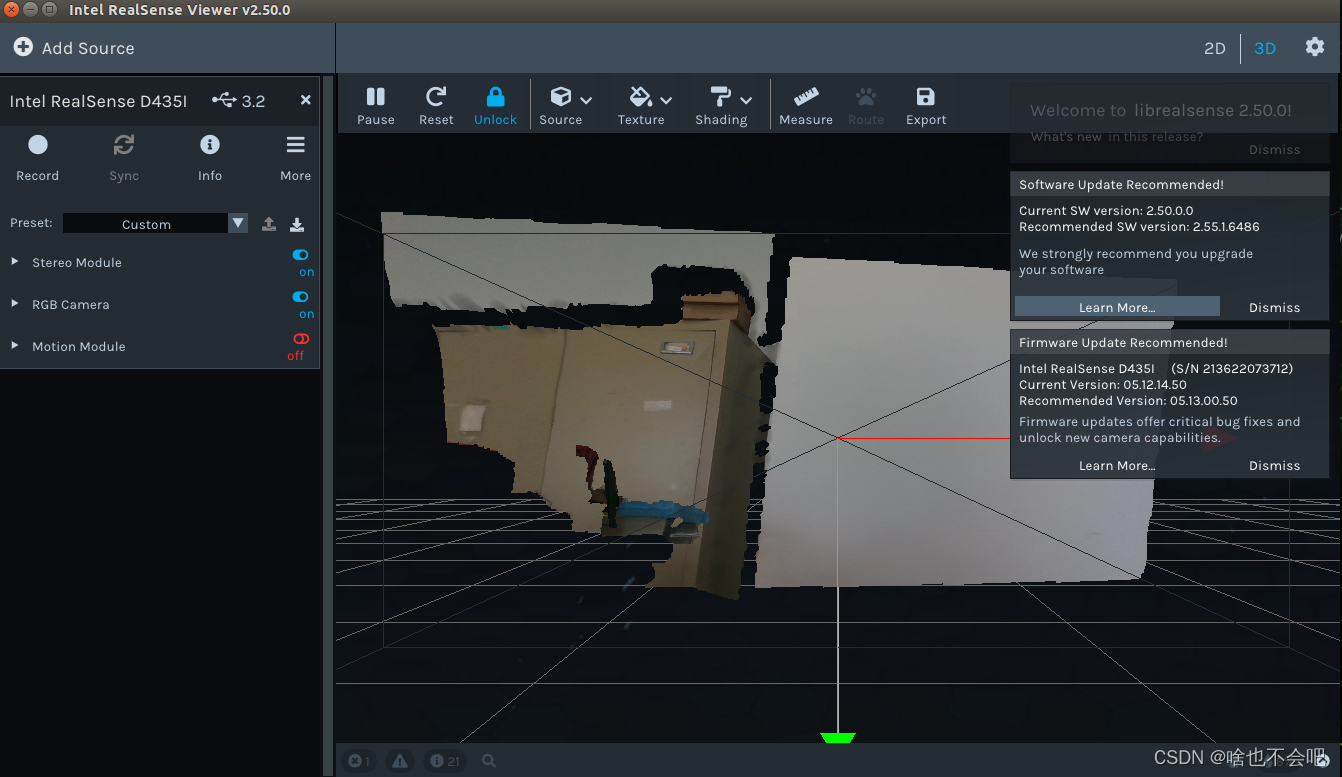
安装好之后终端输入
realsense-viewer
可以看到SDK成功安装
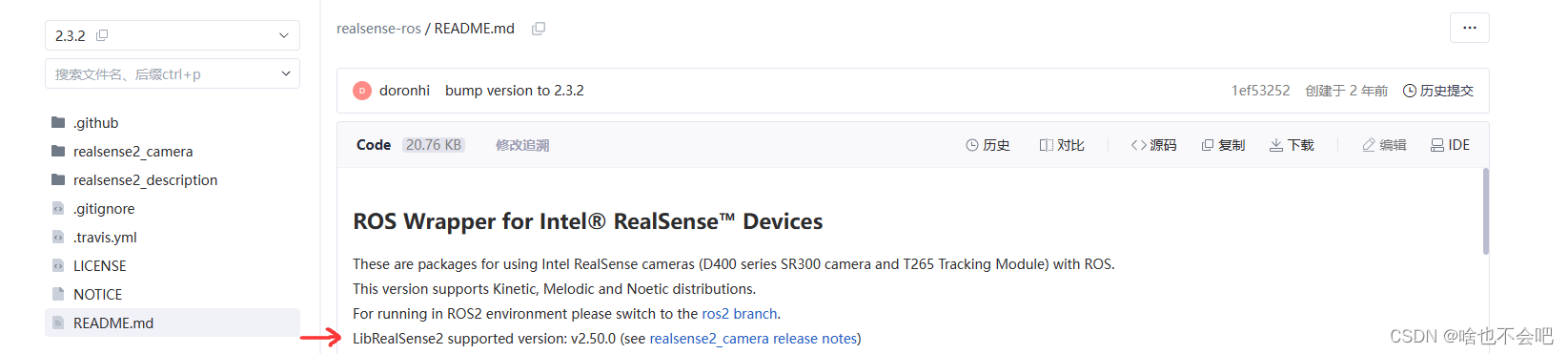
二、安装realsense-ros(前提是安装好ros)
首先可以在官方的参考手册中可以看到,realsense-ros2.3.2需要的SDK版本只有2.50.0,这也是上一步我们为什么安装这个版本的SDK,如果realsense-ros和SDK的版本没有对应可能会造成各种各样的问题
下载编译并安装realsense-ros 2.3.2
终端依次执行
mkdir -p realsense-ros_ws/src && cd realsense-ros_ws/src
git clone -b 2.3.2 https://gitcode.com/IntelRealSense/realsense-ros.git
git clone https://gitcode.com/pal-robotics/ddynamic_reconfigure.git
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
echo "source ~/realsense-ros_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
安装完成后
终端指令运行相机节点
roslaunch realsense2_camera rs_camera.launch
打开rviz并且通过话题可以看到ros包正常工作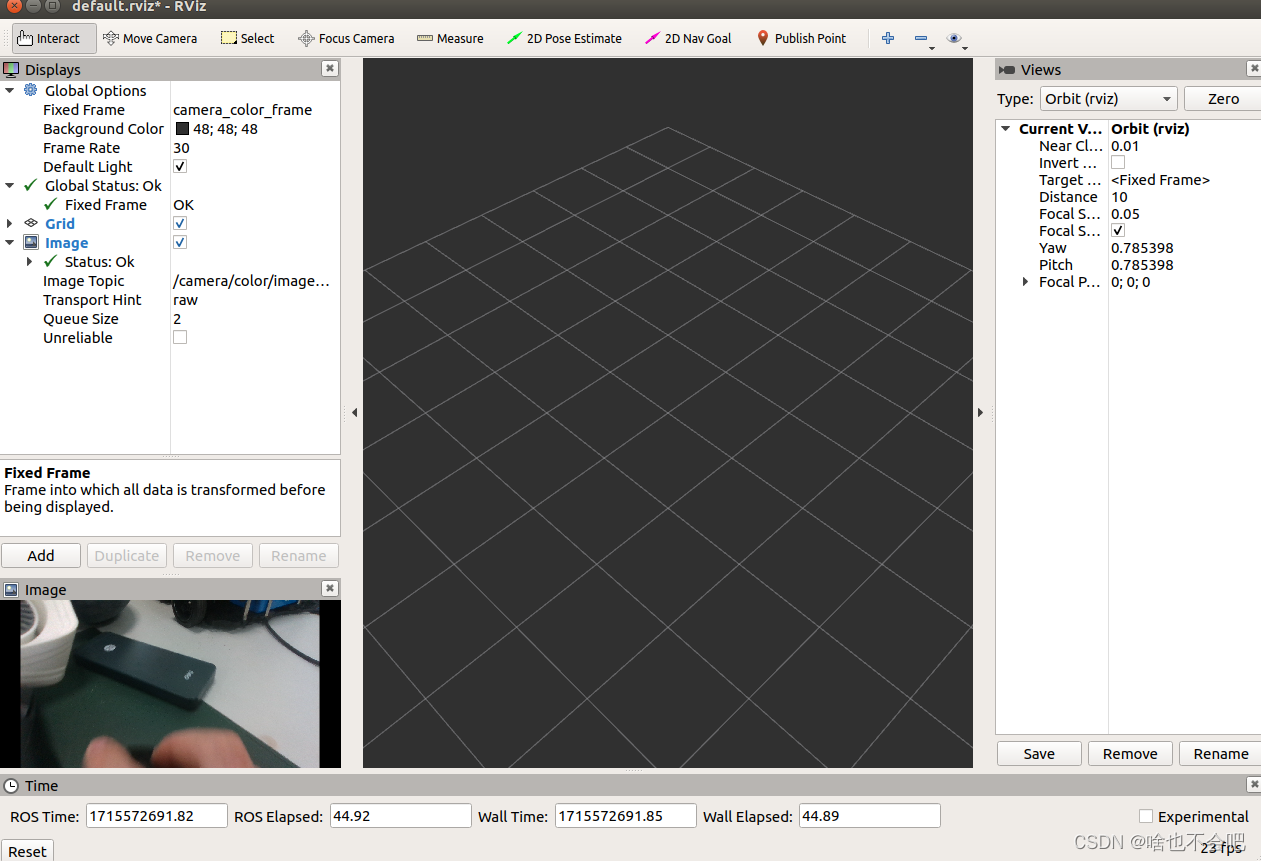
到这里SDK和realsense-ros全部安装完成。















 2809
2809

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









