









目录
文章基于适用于STM32F4系列,作者使用STM32F401CCU6开发板。
本文章基于此系列和开发板展开讨论。
NEC编码
在这篇文章中介绍了硬件和协议,传送门
发送
基本思路
这里使用单个管脚发送的方案,因为使用的是小功率的红外LED,因此直接管脚直连LED即可
之前文章中说到,发送高电平发送是以38KHz闪烁的方波,低电平则为不亮
流程/思路:使用定时器中断产生38KHz的方波,在需要发送高电平时打开定时器,发送低电平时关闭定时器即可,按照NEC编码的规则进行编码发送即可
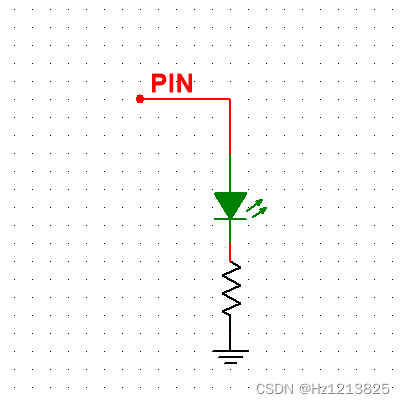
电路如图所示
初始化
GPIO
之前文章中介绍过,传送门
这里需要设置为推挽输出,上拉模式(其他也可)
头文件(IR_NEC.h)
#define IR_NEC_Send_GPIO_RCC RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE)
#define IR_NEC_Send_GPIOx GPIOA
#define IR_NEC_Send_GPIO_Pin GPIO_Pin_0
C文件(IR_NEC.c)
// 发送,GPIO初始化
void IR_NEC_Send_GPIO_init(void)
{
GPIO_InitTypeDef GPIO_Initstruct; //声明GPIO初始化结构体
IR_NEC_Send_GPIO_RCC; //打开GPIO时钟
GPIO_Initstruct.GPIO_Mode = GPIO_Mode_OUT; //输出模式
GPIO_Initstruct.GPIO_OType = GPIO_OType_PP; //推挽输出模式
GPIO_Initstruct.GPIO_Pin = IR_NEC_Send_GPIO_Pin; //引脚0
GPIO_Initstruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉模式
GPIO_Initstruct.GPIO_Speed = GPIO_High_Speed; //高速模式
GPIO_Init(IR_NEC_Send_GPIOx, &GPIO_Initstruct); //初始化GPIO
}
定时器中断和NVIC
使用通用定时器4,中断为每13us( 2 * 38KHz)触发一次,优先级无需特别关心
头文件(IR_NEC.h)
//定时器
#define IR_NEC_Send_TIM_RCC RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE)
#define IR_NEC_Send_TIM_TIMx TIM4
#define IR_NEC_Send_TIM_IRQn TIM4_IRQn
#define IR_NEC_Send_TIM_Priority_1 1
#define IR_NEC_Send_TIM_Priority_2 2
C文件(IR_NEC.c)
//发送,定时器初始化
void IR_NEC_Send_TIM_init(void)
{
TIM_TimeBaseInitTypeDef TIM_Init_Struct; //声明定时器初始化结构体
NVIC_InitTypeDef NVIC_Init_Struct; //声明NVIC初始化结构体
IR_NEC_Send_TIM_RCC; //打开时钟
TIM_Init_Struct.TIM_ClockDivision = TIM_CKD_DIV1; //滤波器不分频
TIM_Init_Struct.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
//每次中断触发时间=[(TIM_Period+1)*(TIM_Prescaler+1)/(SystemCoreClock)] (s) //13。15us
TIM_Init_Struct.TIM_Prescaler = 221 - 1; // 221
TIM_Init_Struct.TIM_Period = 5 - 1; // 5
TIM_Init_Struct.TIM_RepetitionCounter = 0; //高级定时器特有,这里写0就行
TIM_TimeBaseInit(IR_NEC_Send_TIM_TIMx, &TIM_Init_Struct); //调用函数初始
TIM_ITConfig(IR_NEC_Send_TIM_TIMx, TIM_IT_Update, ENABLE); //启用溢出中断
//
NVIC_Init_Struct.NVIC_IRQChannel = IR_NEC_Send_TIM_IRQn; //中断名称
NVIC_Init_Struct.NVIC_IRQChannelCmd = ENABLE; //使能
NVIC_Init_Struct.NVIC_IRQChannelPreemptionPriority = IR_NEC_Send_TIM_Priority_1; //主优先级
NVIC_Init_Struct.NVIC_IRQChannelSubPriority = IR_NEC_Send_TIM_Priority_2; //副优先级
NVIC_Init(&NVIC_Init_Struct); //初始化NVIC
TIM_Cmd(IR_NEC_Send_TIM_TIMx, DISABLE);
}
产生38KHz方波
中断触发频率是2 * 38KHz
思路是每触发一次中断改变电平变换,IR_NEC_Send_Square变量的值每次加1,到2归零,根据此数值改变电平。
C文件(IR_NEC.c)
u8 IR_NEC_Send_Square = 0; //方波
//产生38kHz方波
void TIM4_IRQHandler(void)
{
if (TIM_GetITStatus(IR_NEC_Send_TIM_TIMx, TIM_IT_Update) != RESET)
{
if (IR_NEC_Send_Square)
GPIO_SetBits(IR_NEC_Send_GPIOx, IR_NEC_Send_GPIO_Pin);
else
GPIO_ResetBits(IR_NEC_Send_GPIOx, IR_NEC_Send_GPIO_Pin);
IR_NEC_Send_Square++;
if (IR_NEC_Send_Square >= 2)
IR_NEC_Send_Square = 0;
TIM_ClearITPendingBit(IR_NEC_Send_TIM_TIMx, TIM_IT_Update); //将中断标志清除
}
}
协议发送
引导码
引导码是9ms闪亮和4.5ms不亮
在闪亮时打开定时器,并将其计数值写为0即可
TIM_SetCounter(IR_NEC_Send_TIM_TIMx, 0);
TIM_Cmd(IR_NEC_Send_TIM_TIMx, ENABLE);
不亮时只需要关闭定时器即可
TIM_Cmd(IR_NEC_Send_TIM_TIMx, DISABLE);
下面是代码
C文件(IR_NEC.c)
//发送引导码
__STATIC_INLINE void IR_NEC_Send_Guide(void)
{
GPIO_ResetBits(IR_NEC_Send_GPIOx, IR_NEC_Send_GPIO_Pin);
TIM_SetCounter(IR_NEC_Send_TIM_TIMx, 0);
TIM_Cmd(IR_NEC_Send_TIM_TIMx, ENABLE);
Delay_us(9000); // 9ms闪
TIM_Cmd(IR_NEC_Send_TIM_TIMx, DISABLE);
GPIO_ResetBits(IR_NEC_Send_GPIOx, IR_NEC_Send_GPIO_Pin);
Delay_us(4500); // 4.5ms灭
//共13.5ms
}
数据码
数据码0
数据码0是0.56ms闪亮和0.56ms不亮(不同设备的容错范围可能不同,可以在这附近实验一下)
C文件(IR_NEC.c)
下面是代码
//发送数据0
__STATIC_INLINE void IR_NEC_Send_0(void)
{
GPIO_ResetBits(IR_NEC_Send_GPIOx, IR_NEC_Send_GPIO_Pin);
TIM_SetCounter(IR_NEC_Send_TIM_TIMx, 0);
TIM_Cmd(IR_NEC_Send_TIM_TIMx, ENABLE);
Delay_us(560); // 0.56ms闪
TIM_Cmd(IR_NEC_Send_TIM_TIMx, DISABLE);
GPIO_ResetBits(IR_NEC_Send_GPIOx, IR_NEC_Send_GPIO_Pin);
Delay_us(560); // 0.56ms灭
//共1.12ms
}
数据码1
数据码0是0.56ms闪亮和1.96ms不亮(不同设备的容错范围可能不同,可以在这附近实验一下)
C文件(IR_NEC.c)
下面是代码
//发送数据1
__STATIC_INLINE void IR_NEC_Send_1(void)
{
GPIO_ResetBits(IR_NEC_Send_GPIOx, IR_NEC_Send_GPIO_Pin);
TIM_SetCounter(IR_NEC_Send_TIM_TIMx, 0);
TIM_Cmd(IR_NEC_Send_TIM_TIMx, ENABLE);
Delay_us(560); // 0.56ms闪
TIM_Cmd(IR_NEC_Send_TIM_TIMx, DISABLE);
GPIO_ResetBits(IR_NEC_Send_GPIOx, IR_NEC_Send_GPIO_Pin);
Delay_us(1690); // 1.69ms灭
//共2.25ms
}
结束位
结束位是0.65ms闪亮之后变为不亮
C文件(IR_NEC.c)
下面是代码
//结束位
void IR_NEC_Send_End(void)
{
TIM_Cmd(IR_NEC_Send_TIM_TIMx, ENABLE);
Delay_us(650); // 6ms亮
TIM_Cmd(IR_NEC_Send_TIM_TIMx, DISABLE);
GPIO_ResetBits(IR_NEC_Send_GPIOx, IR_NEC_Send_GPIO_Pin);
}
重复码
重复码是9ms闪亮和2.25ms不亮,需要将时间长度补齐到100ms左右
C文件(IR_NEC.c)
下面是代码
//发送重复码
void IR_NEC_Send_Repect(void)
{
GPIO_ResetBits(IR_NEC_Send_GPIOx, IR_NEC_Send_GPIO_Pin);
TIM_SetCounter(IR_NEC_Send_TIM_TIMx, 0);
TIM_Cmd(IR_NEC_Send_TIM_TIMx, ENABLE);
Delay_us(9000); // 9ms亮
TIM_Cmd(IR_NEC_Send_TIM_TIMx, DISABLE);
GPIO_ResetBits(IR_NEC_Send_GPIOx, IR_NEC_Send_GPIO_Pin);
Delay_us(2250); // 2.25ms灭
//共11.25ms
IR_NEC_Send_End();
Delay_ms(100);
}
数据组合和发送
因为有些厂商使用的不是标准的NEC,因此我们使用一个数值来存放发送的数据,可以是n Byte数据
传入时传入数值地址和数据字节数即可
void IR_NEC_Send_Code(u8 *Dat, u32 Len)
示例调用
u8 DAT[5] = {0X10, 0X68, 0X80, 0X03, 0X0};
IR_NEC_Send_Code(DAT, 5);
数据是从Byte的高位到低位发送
发送流程
- 发送引导码
- 从高位到低位发送全部字节
- 发送结束位
- 延迟
C文件(IR_NEC.c)
// NEC编码发送
void IR_NEC_Send_Code(u8 *Dat, u32 Len)
{
u32 zj;
IR_NEC_Send_Guide(); //引导码
for (int j = 0; j < Len; j++) //循环数组
{
zj = Dat[j];
for (int i = 0; i < 8; i++) //从高到低
{
if (zj & (0X80))
{
IR_NEC_Send_1();
}
else
{
IR_NEC_Send_0();
}
zj <<= 1;
}
}
IR_NEC_Send_End(); //结束位
Delay_ms(40);
}
接收
接收使用的是1838一体式红外解码模块
这个模块会将收到的数据反相,因此闪亮是低电平,不亮是高电平
分析
观察一下接收到的数据
再回忆一下各个码类的长度
就可以轻易发现,每个编码的持续时间各不相同,而且都是以低电平开始,以高电平结束,空闲状态为高电平
因此,我们可以使用外部中断(大多数时间没有信号输入)的下降沿触发(高转低为每个码字的开始也是结束),计算每个码字的持续时间(不同码字的时间不同),来进行解码
细节分析,开始的时候接收到引导码开始,结束的时候因为结束位的存在,因此可以将最后一个数据码的计时补全
思路
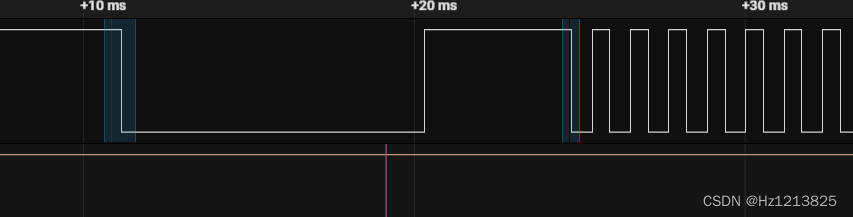
1.首先需要检测引导码
即在第一个下降沿开始计时,到第二个下降沿读取时间,为13.5ms为引导码(即图中蓝色部分所标记的下降沿)
2.数据码
上一个码字的结束也就是这个码字的开始,这个码字的结束也是下个码字的结束
总时间是1.12ms是数据0
总时间是2.25ms是数据1
因此,这是第一个数据码字(bit),在红色部分的下降沿直接计算即可
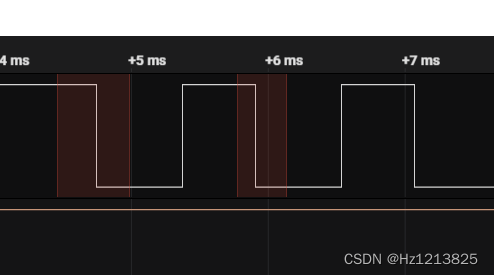
因此我们需要在这个箭头指出的下降沿做两件事:
1.读取定时器的值(计算上个码字的时间)
2.清空计时器(为这个码字的时间计算做准备)

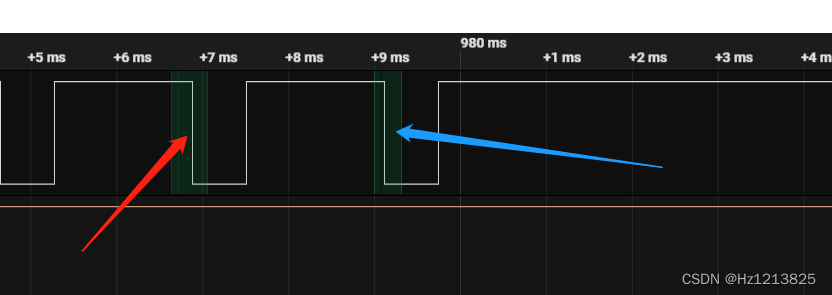
再举一个例子,这次我们举出最后一个码字(bit)
在绿色部分之间计算时间即可,这个图中后一个绿色的下降沿是结束位的开始

同样的,我们需要在红色箭头处做两件事
1.读取定时器的值(计算上个码字的时间)
2.清空计时器(为这个码字的时间计算做准备)
在蓝色箭头需要读取定时器的值即可,并关闭定时器
3.重复码
同样思路,读取两次下降沿之间的时间,为11.25ms是重复码,意味着重写上次的数据

初始化
需要初始化的外设为
- GPIO
- 外部中断和NVIC
- 定时器中断和NVIC
GPIO
上拉输入模式,之前介绍过了,GPIO传送门
头文件(IR_NEC.h)
// GPIO
#define IR_NEC_Read_GPIO_RCC RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE)
#define IR_NEC_Read_GPIOx GPIOB
#define IR_NEC_Read_GPIO_Pin GPIO_Pin_0
C文件(IR_NEC.c)
// 读取,GPIO初始化
void IR_NEC_Read_GPIO_init(void)
{
GPIO_InitTypeDef GPIO_Initstruct; //声明GPIO初始化结构体
IR_NEC_Read_GPIO_RCC; //打开GPIO时钟
GPIO_Initstruct.GPIO_Mode = GPIO_Mode_IN; //输入模式
GPIO_Initstruct.GPIO_OType = GPIO_OType_OD; //开漏输入模式
GPIO_Initstruct.GPIO_Pin = IR_NEC_Read_GPIO_Pin; //引脚0
GPIO_Initstruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉模式
GPIO_Initstruct.GPIO_Speed = GPIO_High_Speed; //高速模式
GPIO_Init(IR_NEC_Read_GPIOx, &GPIO_Initstruct); //初始化GPIO
}
外部中断和NVIC
头文件(IR_NEC.h)
//外部中断
#define IR_NEC_Read_EXIT_Link SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOB, EXTI_PinSource0)
#define IR_NEC_Read_EXIT_Pin EXTI_Line0
#define IR_NEC_Read_EXIT_IRQn EXTI0_IRQn
#define IR_NEC_Read_EXIT_Priority_1 1
#define IR_NEC_Read_EXIT_Priority_2 1
C文件(IR_NEC.c)
//读取,外部中断初始化
void IR_NEC_Read_EXTI_init(void)
{
EXTI_InitTypeDef EXTI_Initstruct; //创建外部中断初始化结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE); //打开时钟
IR_NEC_Read_EXIT_Link; //将GPIO与外部中断连接
EXTI_Initstruct.EXTI_Line = IR_NEC_Read_EXIT_Pin; //配置的是外部中断0
EXTI_Initstruct.EXTI_LineCmd = ENABLE; //使能
EXTI_Initstruct.EXTI_Mode = EXTI_Mode_Interrupt; //选择中断模式
EXTI_Initstruct.EXTI_Trigger = EXTI_Trigger_Falling; //下降沿模式
EXTI_Init(&EXTI_Initstruct); //初始化外部中断0
}
//读取,配置NVIC
void IR_NEC_Read_EXTI_NVIC(void)
{
NVIC_InitTypeDef NVIC_Initstruct; //声明NVIC初始化结构体
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //选定NVIC分组
NVIC_Initstruct.NVIC_IRQChannel = IR_NEC_Read_EXIT_IRQn; //配置的外部中断0
NVIC_Initstruct.NVIC_IRQChannelCmd = ENABLE; //使能
NVIC_Initstruct.NVIC_IRQChannelPreemptionPriority = IR_NEC_Read_EXIT_Priority_1; //主优先级
NVIC_Initstruct.NVIC_IRQChannelSubPriority = IR_NEC_Read_EXIT_Priority_2; //副优先级
NVIC_Init(&NVIC_Initstruct); //初始化外部中断0的NVIC
}
定时器中断和NVIC
这里我们要保证解码的时间范围内不会触发中断,即最大时间要超过14ms
为了便于计算,我们将分频后的频率设为1MHz,这样一个计数值为1us
定时器传送门
头文件(IR_NEC.h)
//定时器
#define IR_NEC_Read_TIM_RCC RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE)
#define IR_NEC_Read_TIM_TIMx TIM3
#define IR_NEC_Read_TIM_IRQn TIM3_IRQn
#define IR_NEC_Read_TIM_Priority_1 2
#define IR_NEC_Read_TIM_Priority_2 2
C文件(IR_NEC.c)
//读取,定时器初始化
void IR_NEC_Read_TIM_init(void)
{
TIM_TimeBaseInitTypeDef TIM_Init_Struct; //声明定时器初始化结构体
NVIC_InitTypeDef NVIC_Init_Struct; //声明NVIC初始化结构体
IR_NEC_Read_TIM_RCC; //打开时钟
TIM_Init_Struct.TIM_ClockDivision = TIM_CKD_DIV1; //滤波器不分频
TIM_Init_Struct.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
//每次中断触发时间=[(TIM_Period+1)*(TIM_Prescaler+1)/(SystemCoreClock)] (s)
TIM_Init_Struct.TIM_Prescaler = 84 - 1;
TIM_Init_Struct.TIM_Period = 0xffff - 1;
TIM_Init_Struct.TIM_RepetitionCounter = 0; //高级定时器特有,这里写0就行
TIM_TimeBaseInit(IR_NEC_Read_TIM_TIMx, &TIM_Init_Struct); //调用函数初始
TIM_ITConfig(IR_NEC_Read_TIM_TIMx, TIM_IT_Update, ENABLE); //启用溢出中断
NVIC_Init_Struct.NVIC_IRQChannel = IR_NEC_Read_TIM_IRQn; //中断名称
NVIC_Init_Struct.NVIC_IRQChannelCmd = ENABLE; //使能
NVIC_Init_Struct.NVIC_IRQChannelPreemptionPriority = IR_NEC_Read_TIM_Priority_1; //主优先级1
NVIC_Init_Struct.NVIC_IRQChannelSubPriority = IR_NEC_Read_TIM_Priority_2; //副优先级1
NVIC_Init(&NVIC_Init_Struct); //初始化NVIC
TIM_Cmd(IR_NEC_Read_TIM_TIMx, DISABLE); //关闭定时器
}
解码代码的思路
从上文中可以看出,整个解码过程分为2个大的部分
- 读取引导码或重复码
- 按顺序读取数据
因此我们使用状态机的思想来编写解码程序
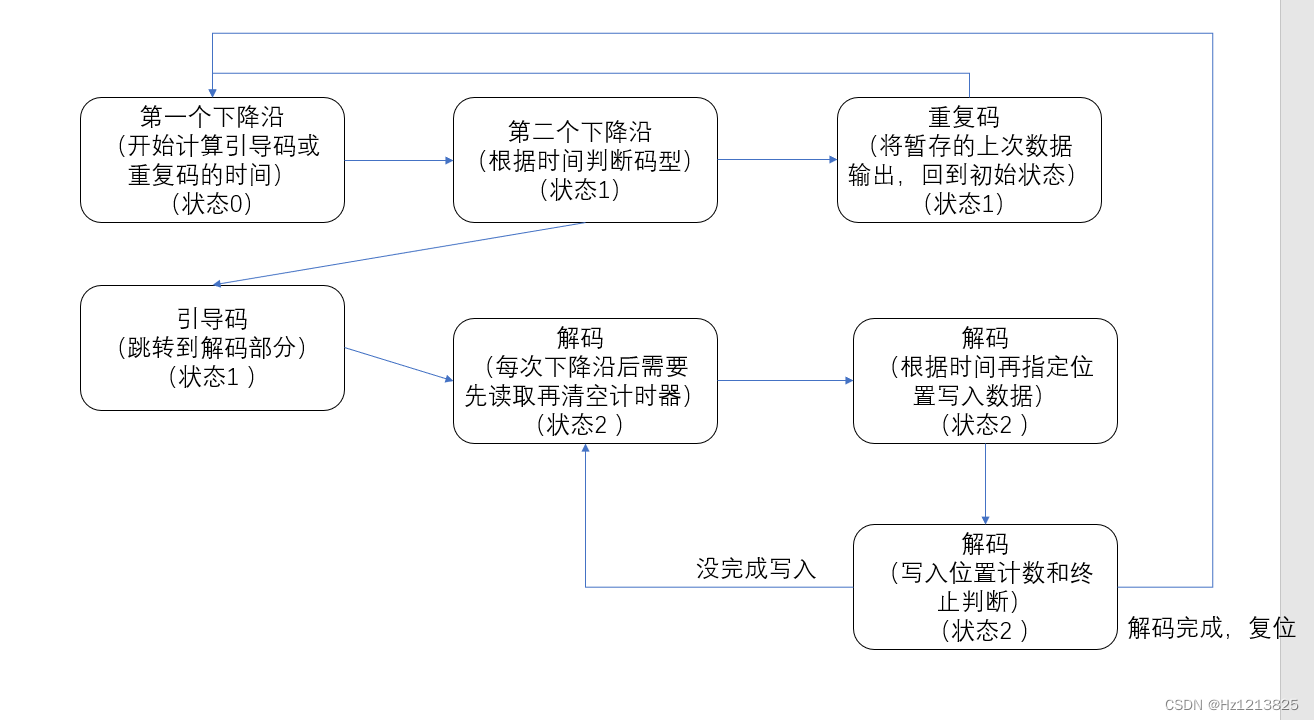
就像这个图中所表示的这样
代码
为了适配不同厂商的某些不标准的NEC编码,我们首先定义一个Byte数组,具体有几个字节的数据可以根据需要修改
头文件(IR_NEC.h)
#define N 4
extern u8 IR_NEC_Read_Dat[N]; //解码的数据
extern u8 IR_NEC_Read_OK; //解码成功标志C文件(IR_NEC.c)
u8 IR_NEC_Read_Dat[N] = {0};
u8 IR_NEC_Read_Dat2[N] = {0};整体代码
C文件(IR_NEC.c)
// NEC解码函数,外部中断下降沿调用
void IR_NEC_Read_Decode(void (*val)(void))
{
if (IR_NEC_Read_ins == 0) //检测初始低电平
{//标号0
IR_NEC_Read_ins = 1;
TIM_Cmd(IR_NEC_Read_TIM_TIMx, ENABLE);
TIM_SetCounter(IR_NEC_Read_TIM_TIMx, 0);
}
else if (IR_NEC_Read_ins == 1) //判断初始低电平到第二个低电平时间
{
IR_NEC_Read_Time = TIM_GetCounter(IR_NEC_Read_TIM_TIMx);
if (IR_NEC_Read_Time > 13500 - 500 && IR_NEC_Read_Time < 13500 + 500) // 13.5ms左右 引导码
{//标号1.1
IR_NEC_Read_ins = 2;
TIM_SetCounter(IR_NEC_Read_TIM_TIMx, 0);
IR_NEC_Read_OK = 0;
for (int i = 0; i < N; i++)
IR_NEC_Read_Dat[i] = 0;
IR_NEC_Read_zj = 0;
}
else if (IR_NEC_Read_Time > 11250 - 1000 && IR_NEC_Read_Time < 11250 + 1000) // 11.25ms左右 重复码
{//标号1.2
IR_NEC_Read_ins = 0;
IR_NEC_Read_OK = 2;
for (int i = 0; i < N; i++)
IR_NEC_Read_Dat[i] = IR_NEC_Read_Dat2[i];
TIM_SetCounter(IR_NEC_Read_TIM_TIMx, 0);
}
else //超时或时间过短 复位
{
IR_NEC_Read_ins = 0;
}
}
else if (IR_NEC_Read_ins == 2) //开始解码
{//标号2
IR_NEC_Read_Time = TIM_GetCounter(IR_NEC_Read_TIM_TIMx);
if (IR_NEC_Read_Time > 1120 - 500 && IR_NEC_Read_Time < 1120 + 500) // 1.12ms 写入0
{
IR_NEC_Read_zj <<= 1; //向左移位
IR_NEC_Read_zj &= 0xfe; //最低位置零
IR_NEC_Read_Decode_i++;
}
else if (IR_NEC_Read_Time > 2250 - 500 && IR_NEC_Read_Time < 2250 + 500) // 2.25ms 写入1
{
IR_NEC_Read_zj <<= 1;
IR_NEC_Read_zj |= 0x01;
IR_NEC_Read_Decode_i++;
}
else //出错复位
{
IR_NEC_Read_ins = 0;
IR_NEC_Read_Decode_i = 0;
IR_NEC_Read_Decode_j = 0;
IR_NEC_Read_zj = 0;
}
if (IR_NEC_Read_Decode_i >= 8) // uchar每位写入数据
{
IR_NEC_Read_Decode_i = 0;
IR_NEC_Read_Dat[IR_NEC_Read_Decode_j] = IR_NEC_Read_zj;
IR_NEC_Read_Decode_j++;
IR_NEC_Read_zj = 0;
}
if (IR_NEC_Read_Decode_j >= N) //数据数组的不同位写入数据
{
IR_NEC_Read_Decode_i = 0;
IR_NEC_Read_Decode_j = 0;
IR_NEC_Read_ins = 0;
IR_NEC_Read_OK = 1;
IR_NEC_Read_zj = 0;
for (int i = 0; i < N; i++)
IR_NEC_Read_Dat2[i] = IR_NEC_Read_Dat[i];
TIM_Cmd(IR_NEC_Read_TIM_TIMx, DISABLE);
val();
}
TIM_SetCounter(IR_NEC_Read_TIM_TIMx, 0);
}
}
如图所示,在数据部分(以引导码为开始的)除了指出的两个下降沿,其余均为标号2状态

这是重复码的模式















 1915
1915











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









