







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
导航系统的数据融合技术是实现高精度定位的重要一环。随着各种导航传感器的发展,如惯性传感器、卫星定位模块、视觉传感器等,单个传感器难以满足实时高精度定位的需求。因此,如何有效地融合这些不同传感器采集到的定位数据,从而提高整体导航系统的精度就显得尤为重要。
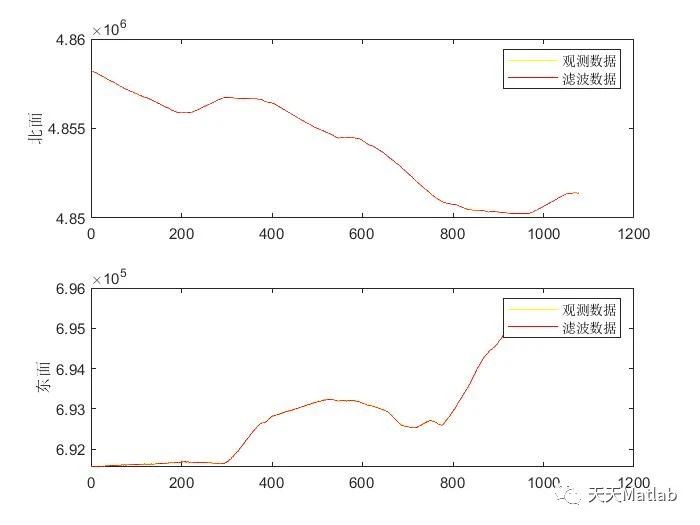
卡尔曼滤波是一种广泛应用的数据融合算法。它通过建立状态空间模型和观测模型,利用贝叶斯推断的思想,在每次观测更新后都能实时估计系统状态的最优值。在导航数据融合中,可以将位置、速度等作为系统状态,将各种传感器采集到的位置、速度数据作为观测值,然后通过卡尔曼滤波实现状态估计。
具体来说,首先需要建立系统状态空间模型。例如可以将位置坐标x、y和速度vx、vy作为系统状态,则状态向量为:
x=[x y vx vy]T
然后建立系统状态转移函数,描述状态在时间间隔内的变化:
x(k)=F*x(k-1)+w
其中F为状态转移矩阵,w为过程噪声。
接着建立观测模型。例如GPS可以直接观测位置坐标,惯性传感器可以观测加速度来推导速度,则观测向量为:
z=[x y vx vy]T
观测函数为:
z=H*x+v
其中H为观测矩阵,v为观测噪声。
然后,在每次有新观测值更新时,就可以通过卡尔曼滤波算法更新状态估计。
通过上述方法,就可以实现不同传感器数据的有效融合,从而提高整体导航系统的定位精度。卡尔曼滤波由于其简单实用的特点,广泛应用于各类导航系统的数据融合中。
📣 部分代码
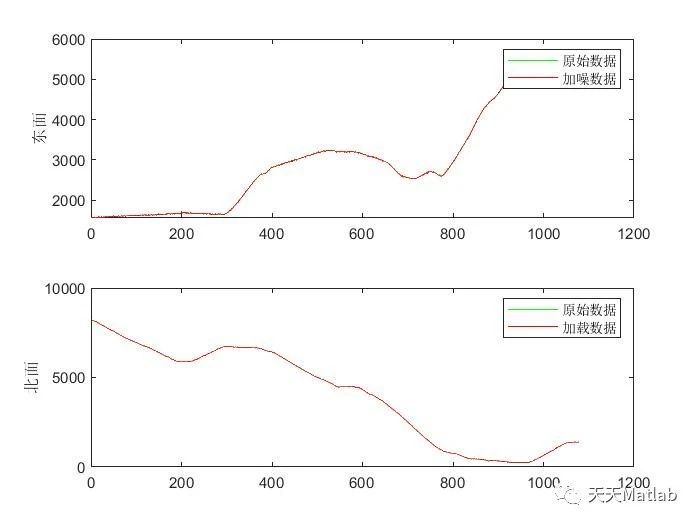
% read original dataX = load('z+n.txt');posOfEast = X(:, 1);posOfNorth = X(:, 2);GPSHeading = heading_preprocess(X(:, 3));% GPSHeading = X(:, 3);GPSSpeed = X(:, 4);GyroAngularRate = X(:, 5);Odometer = X(:, 6);% add gaussian white noise (mean=0, variance=8)posOfEastNoisy = posOfEast + randn(length(posOfEast), 1)*8;posOfNorthNoisy = posOfNorth + randn(length(posOfEast), 1)*8;% draw curve with and without noise to comparefigure(1)x = 1:length(posOfEast);subplot(211);plot(x, posOfEast-690000, 'g');hold on;plot(x, posOfEastNoisy-690000, 'r');legend('原始数据', '加噪数据');ylabel('东面');subplot(212);plot(x, posOfNorth-4850000, 'g');hold on;plot(x, posOfNorthNoisy-4850000, 'r');
⛳️ 运行结果


















 209
209











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









