







双目摄像头中进行矫正所求的畸变参数有五个,那么为什么要求解畸变参数呢?受镜头制造精度的影响,计算机视觉系统拍摄的图像会出现不同程度的畸变,这种畸变可以分为径向畸变和切向畸变两种。对一般低精度要求的场合,只考虑径向畸变就可以,因为切向畸变的影响远小于径向畸变。
径向畸变(Radial distortion):径向畸变的效应一般有两种情况,分别是桶形畸变(barrel distortion),另一种是枕形畸变(pincushion distortion),下面的图片可以形象的表现出来。

径向畸变可以用如下公式修正:
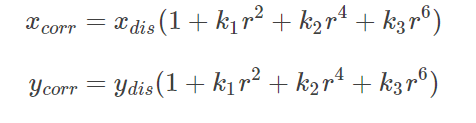
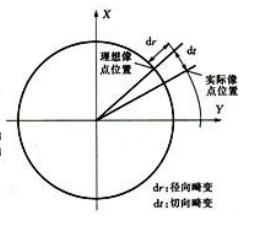
切向畸变(tangential distortion):切向畸变是由于摄像机制造上的缺陷使得透镜本身与图像平面不平行而产生的,“切向畸变”就是矢量端点沿切线方向发生的变化,也就是角度的变化dt。我觉得下面的图片不仅区分了径向畸变和切向畸变的不同,也表现出了切向畸变的现象

切向畸变可以用如下公式修正:

















 2176
2176











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









