







1 内容介绍
基于粒子群算法优化无人机编队布局实现车载网络通信覆盖。

2 仿真代码
function z = objfuntest(x, y, v, u, k)% Number of Uncovered VehiclesnVehicle = y;% Initializing Vehicles Position Structvehicle = v;% Radio coverage of UAV in metersUAVRadius = 500;% Infrastructure RadiusinfRadius = 500;% Communication Range between RSU and UAV or UAV and UAVlosRange = 1200;% Position of infrastructurepos = u;niter = k;endendends1 = 0;s2 = 0;% Calculating Fitness for Vehicles (Moving Towards Center)for j=1:Mc1 = 1/(1 + exp(-(center_covered_vehicle(j).c_eval)));d1 = sqrt(sum((x - center_covered_vehicle(j).Position) .^2));e1 = d1/UAVRadius;normalize1 = 0.5 * e1 + 0.5;multi1 = normalize1*c1;s1 = s1 + multi1;end% Calculating Fitness for Vehicles (Moving Towards Edge)for k=1:Nc2 = 1/(1 + exp(-(edge_covered_vehicle(k).c_eval)));d2 = sqrt(sum((x - edge_covered_vehicle(k).Position) .^2));e2 = d2/UAVRadius;normalize2 = 1 - (0.5 * e2 + 0.5);multi2 = normalize2*c2;s2 = s2 + multi2;endeval_f1 = (s1 + s2)/vehicle_count;elseeval_f1 = 0;end% Return Fitness Value and number of UAVif M > 0 || N > 0z.Fitness = eval_f1;z.M = M;z.N = N;z.V = vehicle_count;elsez.Fitness = -inf;z.M = M;z.N = N;z.V = vehicle_count;endend
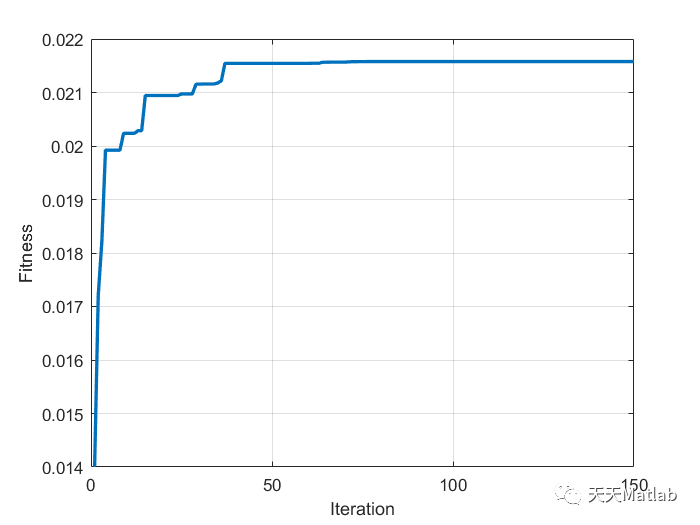
3 运行结果

4 参考文献
[1]陈维宗. 基于粒子群的无线传感器网络覆盖控制策略研究[D]. 西北师范大学, 2015.
[2]张亚斌. 网络攻击环境下无人机集群控制算法研究.
[3]杨遵, and 雷虎民. "采用粒子群优化算法规划无人机侦察航路." 电光与控制 14.2(2007):5.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。
















 4919
4919











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











