







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
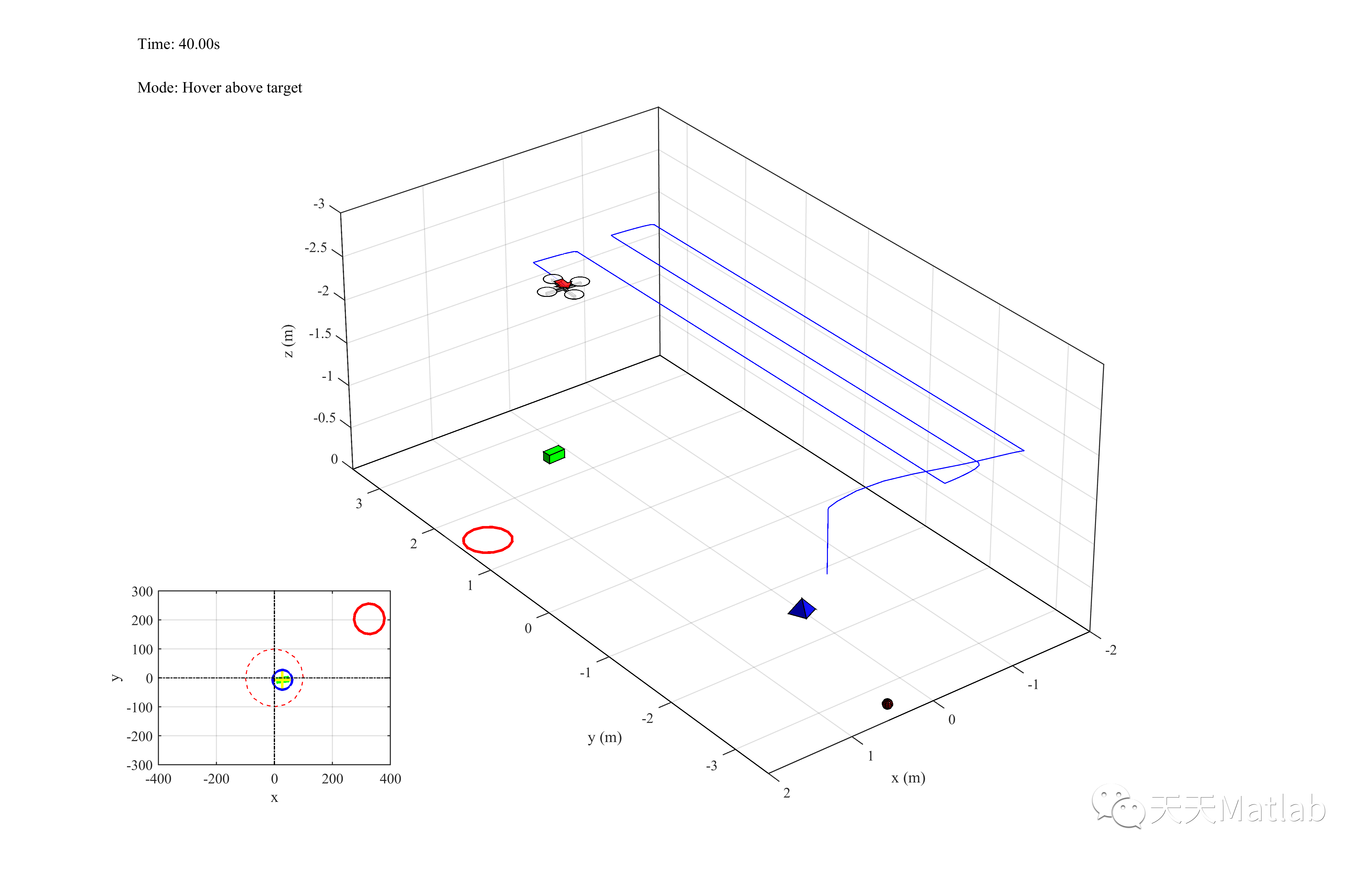
PRISM(Probabilistic Reactive InSiMulation)模型是一种用于无人机目标搜索和避碰的概率反应仿真模型。以下是基于PRISM模型实现无人机目标搜索和避碰的简要步骤:
-
环境建模:对搜索区域进行模拟和建模,包括地形、障碍物、目标位置等信息。这可以通过地图数据、传感器信息或环境感知算法获取。
-
无人机传感和感知:使用传感器(如摄像头、激光雷达等)获取环境信息,并进行感知和识别目标。这可以通过目标检测和跟踪算法来实现。
-
目标搜索策略:根据任务需求和搜索目标制定搜索策略。常见的策略有格子搜索、螺旋搜索、梯度下降等。PRISM模型考虑了无人机周围可能出现的威胁并计算避碰概率。
-
避碰控制:基于PRISM模型,设计避碰控制策略以规避与其他目标或障碍物的碰撞。避碰策略可以基于避碰概率、航迹规划、轨迹规划等进行决策。
-
实时决策和控制:根据控制。这可能涉及路径规划、速度调整等。
-
监测和更新:持续监测环境变化,与目标或障碍物的动态更新进行交互,并及时更新控制策略。
-
目标追踪和搜索评估:跟踪已发现的目标并评估搜索成果。根据任务要求和性能指标进行结果评估和优化。
需要注意的是,PRISM模型的实现可能需要结合其他技术,如传感器融合、路径规划算法、机器学习等。可根据具体应用场景和任务需求调整步骤和方法。此外,无人机飞行安全是关键考虑因素,必须遵守相关航空法规和操作规程,确保安全操作。
⛄ 部分代码
function [stateTable, transitionTable] = LoadDecisions(dataName)% close all% clear% clc%dataName = 'scenario3b_5x5_1';%% Load data% Load statesstateDataRaw = importdata(['ControllerV2/',dataName,'.sta']);% Load transitionstransDataFile = fopen(['ControllerV2/',dataName,'.tra']);transDataRaw = textscan(transDataFile, '%s %s %s %s %s');fclose(transDataFile);%% Format states% Remove brackets and split at commafor i = 1:size(stateDataRaw,1)% Find bracketsstartBr = strfind(stateDataRaw{i},'(');endBr = strfind(stateDataRaw{i},')');% First element in row is stateif i == 1state = 'state';elsestate = stateDataRaw{i}(1:startBr-2);end% Keep only characters in betweenrow = stateDataRaw{i}(startBr+1:endBr-1);% Split string at commasrow = strsplit(row,',');% Add to new arraystateData(i,:) = [state row];end% Split datastateHeaders = stateData(1,:);stateValues = zeros(size(stateData,1), size(stateData,2));stateValues = str2double(stateData(2:end,:));stateTableOld = array2table(stateValues, 'VariableNames', stateHeaders);stateTable = array2table(stateValues(:,1:5), 'VariableNames', stateHeaders(1:5));gpsStates = stateValues(:,6:end-1);stateTable.gps = gpsStates;stateTable.b = stateValues(:,end);%% Format transitions% Fix thingsfor i = 2:length(transDataRaw{1})currentState(i,1) = str2num(transDataRaw{1}{i});something(i,1) = str2num(transDataRaw{2}{i});nextState(i,1) = str2num(transDataRaw{3}{i});probability(i,1) = str2num(transDataRaw{4}{i});direction(i,1) = transDataRaw{5}(i);endtransitionTable = table(currentState,nextState,probability,direction,...'VariableNames', {'state','next','prob','dir'});
⛄ 运行结果
⛄ 参考文献
[1] 王瑾.变质量无人机编队控制技术及其在农业植保场景下的应用研究[D].浙江大学[2023-06-25].
[2] 张立鹏,赵建辉,肖永德.基于最大可知度的无人机协同搜索控制方法[J].电光与控制, 2014, 21(11):8.DOI:10.3969/j.issn.1671-637X.2014.11.007.
[3] 赖云晖.四旋翼无人机编队控制系统设计及实现[D].电子科技大学[2023-06-25].
[4] 郭军,朱凡,刘远飞.基于马尔科夫链预测的多无人机协同搜索控制[J].弹箭与制导学报, 2007, 27(5):4.DOI:10.3969/j.issn.1673-9728.2007.05.097.
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
🍅 仿真咨询
1.卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
2.图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
3.旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划
4.无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配
5.传感器部署优化、通信协议优化、路由优化、目标定位
6.信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号
7.生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化
8.微电网优化、无功优化、配电网重构、储能配置
9.元胞自动机交通流 人群疏散 病毒扩散 晶体生长
















 743
743











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











