






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
🔥 内容介绍
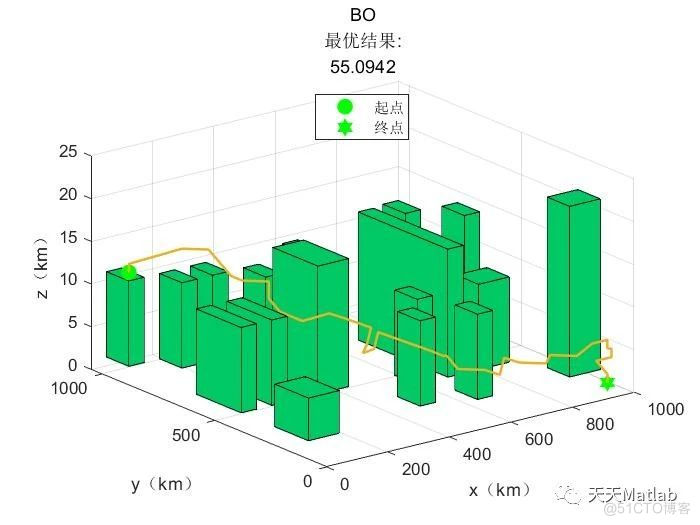
无人机技术的发展使得其在军事、民用、科研等领域得到广泛应用。然而,在实际应用中,无人机遇到的障碍物和复杂地形会给其飞行带来很大的挑战。因此,无人机的避障和航迹规划问题一直是无人机领域的研究热点。
贝叶斯算法是一种基于概率统计的算法,其主要思想是利用已知的先验概率和新的观察数据,来更新概率模型,得到后验概率。在无人机避障和航迹规划问题中,贝叶斯算法可以用来对无人机周围环境的障碍物进行建模,并且基于这个模型来进行航迹规划,从而实现无人机的自主避障。
在实际应用中,无人机需要实时获取周围环境的信息,并根据这些信息进行避障和航迹规划。这个过程需要用到多个传感器,如激光雷达、摄像头、超声波传感器等。这些传感器可以帮助无人机获取周围环境的信息,例如障碍物的位置、大小、形状等。然后,利用这些信息,无人机可以建立一个障碍物的概率模型,从而进行航迹规划。
在贝叶斯算法中,概率模型可以用贝叶斯网络来表示。贝叶斯网络是一种图形模型,用于表示变量之间的依赖关系和概率分布。在无人机避障和航迹规划问题中,贝叶斯网络可以用来表示无人机周围环境中的障碍物和无人机的位置之间的依赖关系。例如,如果无人机周围有一个障碍物,那么无人机的位置就不能在障碍物的范围内。
基于贝叶斯网络的航迹规划算法可以分为两个步骤:建模和规划。在建模阶段,无人机需要收集周围环境的信息,并将这些信息用贝叶斯网络建模。在规划阶段,无人机需要根据建好的贝叶斯网络,进行航迹规划。具体来说,规划算法需要考虑无人机的当前位置、目标位置、周围环境中的障碍物等因素,从而生成一条安全的航迹。
总之,基于贝叶斯算法实现复杂地形下的无人机避障三维航迹规划,是一项非常有挑战性的任务。这个任务需要无人机具备实时获取周围环境信息的能力,以及对这些信息进行建模和规划的能力。同时,这个任务也需要研究人员在贝叶斯算法的基础上,开发出高效的航迹规划算法,以满足实际应用的需求。
📣 部分代码
function DrawPic(result1,data,str)
figure
plot3(data.S0(:,1)*data.unit(1),data.S0(:,2)*data.unit(2),data.S0(:,3)*data.unit(3),'o','LineWidth',1.5,...
'MarkerEdgeColor','g',...
'MarkerFaceColor','g',...
'MarkerSize',8)
hold on
plot3(data.E0(:,1)*data.unit(1),data.E0(:,2)*data.unit(2),data.E0(:,3)*data.unit(3),'h','LineWidth',1.5,...
'MarkerEdgeColor','g',...
'MarkerFaceColor','g',...
'MarkerSize',8)
plot3(result1.path(:,1).*data.unit(1),result1.path(:,2).*data.unit(2),result1.path(:,3).*data.unit(3),'-','LineWidth',1.5,...
'MarkerEdgeColor','g',...
'MarkerFaceColor','g',...
'MarkerSize',10)
for i=1:data.numObstacles
x=1+data.Obstacle(i,1);
y=1+data.Obstacle(i,2);
z=1+data.Obstacle(i,3);
long=data.Obstacle(i,4);
wide=data.Obstacle(i,5);
pretty=data.Obstacle(i,6);
x0=ceil(x/data.unit(1))*data.unit(1);
y0=ceil(y/data.unit(2))*data.unit(2);
z0=ceil(z/data.unit(3))*data.unit(3);
long0=ceil(long/data.unit(1))*data.unit(1);
wide0=ceil(wide/data.unit(2))*data.unit(2);
pretty0=ceil(pretty/data.unit(3))*data.unit(3);
[V,F] = DrawCuboid(long0, wide0, pretty0, x0,y0,z0);
end
legend('起点','终点','location','north')
grid on
%axis equal
xlabel('x(km)')
ylabel('y(km)')
zlabel('z(km)')
title([str, '最优结果:', num2str(result1.fit)])
% figure
% plot3(data.S0(:,1)*data.unit(1),data.S0(:,2)*data.unit(2),data.S0(:,3)*data.unit(3),'o','LineWidth',2,...
% 'MarkerEdgeColor','r',...
% 'MarkerFaceColor','r',...
% 'MarkerSize',10)
% hold on
% plot3(data.E0(:,1)*data.unit(1),data.E0(:,2)*data.unit(2),data.E0(:,3)*data.unit(3),'h','LineWidth',2,...
% 'MarkerEdgeColor','r',...
% 'MarkerFaceColor','r',...
% 'MarkerSize',10)
% plot3(result1.path(:,1).*data.unit(1),result1.path(:,2).*data.unit(2),result1.path(:,3).*data.unit(3),'-','LineWidth',2,...
% 'MarkerEdgeColor','k',...
% 'MarkerFaceColor','r',...
% 'MarkerSize',10)
% for i=1:data.numObstacles
% x=1+data.Obstacle(i,1);
% y=1+data.Obstacle(i,2);
% z=1+data.Obstacle(i,3);
% long=data.Obstacle(i,4);
% wide=data.Obstacle(i,5);
% pretty=data.Obstacle(i,6);
%
% x0=ceil(x/data.unit(1))*data.unit(1);
% y0=ceil(y/data.unit(2))*data.unit(2);
% z0=ceil(z/data.unit(3))*data.unit(3);
% long0=ceil(long/data.unit(1))*data.unit(1);
% wide0=ceil(wide/data.unit(2))*data.unit(2);
% pretty0=ceil(pretty/data.unit(3))*data.unit(3);
% [V,F] = DrawCuboid(long0, wide0, pretty0, x0,y0,z0);
% end
% legend('起点','终点','location','north')
% grid on
% xlabel('x(km)')
% ylabel('y(km)')
% zlabel('z(km)')
% title([str, '最优结果:', num2str(result1.fit)])
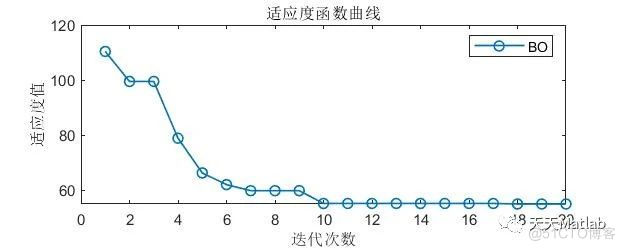
end⛳️ 运行结果
🔗 参考文献
[1] 单光瑞,赵金,徐婷,等.贝叶斯框架下基于灰狼优化策略的多无人机巡检航迹规划[J].计算机应用与软件, 2023, 40(2):82-88.
[2] 杜晓玉,郭启程,李茵茵,et al.城市环境下基于改进鲸鱼算法的无人机三维路径规划方法[J].计算机科学, 2021, 48(12):8.DOI:10.11896/jsjkx.201000021.
















 3615
3615











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











