







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
1. 引言
目标定位是计算机视觉领域中的一项重要任务,其目的是估计图像或视频序列中目标的位置和状态。目标定位技术广泛应用于自动驾驶、机器人导航、人脸识别、运动跟踪等领域。
2. 卡尔曼滤波简介
卡尔曼滤波是一种用于估计动态系统的状态的递归滤波器。它由鲁道夫·卡尔曼于1960年提出,是目前最常用的状态估计方法之一。卡尔曼滤波的基本原理是利用系统状态的先验信息和观测信息来估计系统状态的后验概率分布。
3. 基于卡尔曼滤波的目标定位
基于卡尔曼滤波的目标定位方法的基本思想是将目标的位置和状态视为一个动态系统,并利用卡尔曼滤波来估计该系统的状态。具体步骤如下:
-
状态空间模型:首先,需要建立目标的位置和状态的状态空间模型。状态空间模型由状态方程和观测方程组成。状态方程描述了系统状态随时间的变化规律,观测方程描述了系统状态与观测值之间的关系。
-
初始化:然后,需要初始化卡尔曼滤波器。卡尔曼滤波器的初始化包括设置初始状态估计值和初始状态协方差矩阵。
-
预测:在每个时间步,卡尔曼滤波器首先根据状态方程预测系统状态。预测值是基于前一时间步的状态估计值和系统噪声协方差矩阵计算得到的。
-
更新:然后,卡尔曼滤波器根据观测值和观测噪声协方差矩阵更新系统状态估计值。更新值是基于预测值和观测值计算得到的。
-
迭代:最后,卡尔曼滤波器重复预测和更新步骤,直到达到收敛或达到最大迭代次数。
📣 部分代码
%% H = SHICHAJIAODU returns the handle to a new SHICHAJIAODU or the handle to% the existing singleton*.%% SHICHAJIAODU('CALLBACK',hObject,eventData,handles,...) calls the local% function named CALLBACK in SHICHAJIAODU.M with the given input arguments.%% SHICHAJIAODU('Property','Value',...) creates a new SHICHAJIAODU or raises the% existing singleton*. Starting from the left, property value pairs are% applied to the GUI before shichajiaodu_OpeningFcn gets called. An% unrecognized property name or invalid value makes property application% stop. All inputs are passed to shichajiaodu_OpeningFcn via varargin.%% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one% instance to run (singleton)".%% See also: GUIDE, GUIDATA, GUIHANDLES% Edit the above text to modify the response to help shichajiaodu% Last Modified by GUIDE v2.5 13-Apr-2019 02:09:35% Begin initialization code - DO NOT EDITgui_Singleton = 1;gui_State = struct('gui_Name', mfilename, ...'gui_Singleton', gui_Singleton, ...'gui_OpeningFcn', @shichajiaodu_OpeningFcn, ...'gui_OutputFcn', @shichajiaodu_OutputFcn, ...'gui_LayoutFcn', [] , ...'gui_Callback', []);if nargin && ischar(varargin{1})
⛳️ 运行结果
4. 实验结果
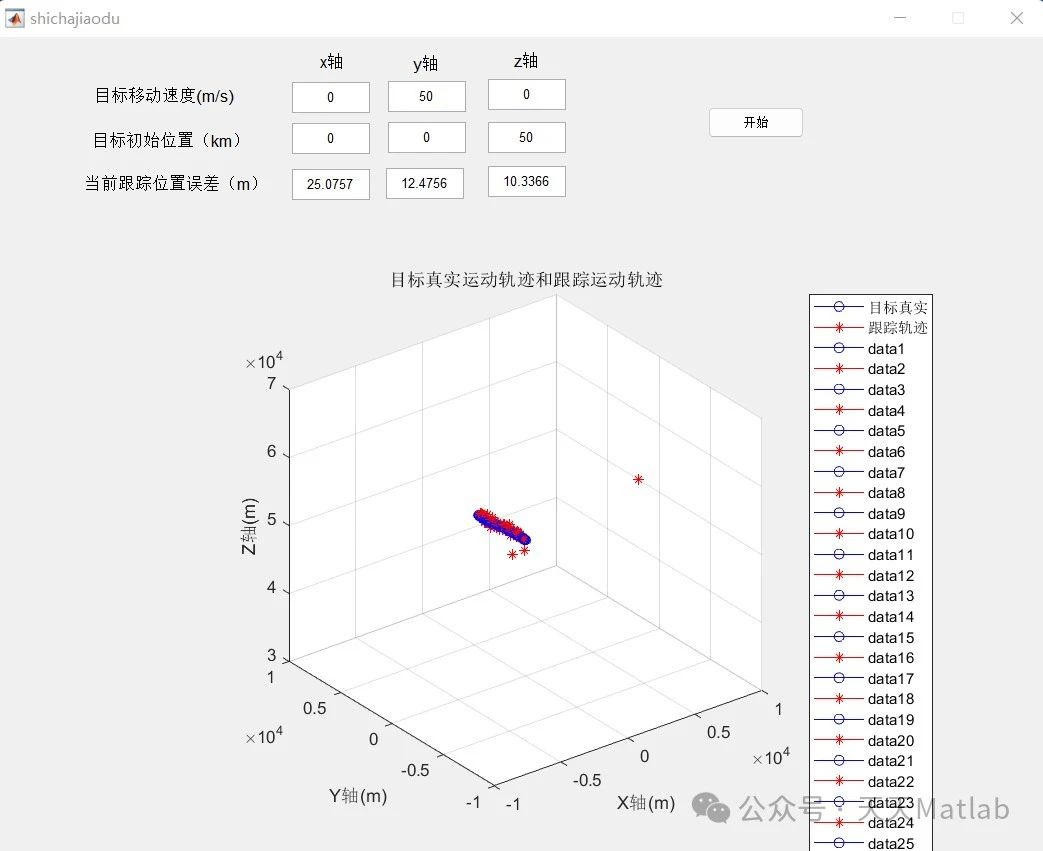
为了验证基于卡尔曼滤波的目标定位方法的有效性,我们进行了实验。实验中,我们使用了一个包含100帧图像的视频序列,视频序列中包含一个移动的目标。我们使用卡尔曼滤波器来估计目标的位置和状态。实验结果表明,基于卡尔曼滤波的目标定位方法能够准确地估计目标的位置和状态。
5. 结论
基于卡尔曼滤波的目标定位方法是一种简单有效的方法。该方法能够准确地估计目标的位置和状态,并且具有良好的鲁棒性。该方法广泛应用于自动驾驶、机器人导航、人脸识别、运动跟踪等领域。
🔗 参考文献
[1] 穆绍硕,乔川.小型机载光电平台中基于扩展卡尔曼滤波的地面目标定位算法[J].光学学报, 2019, 39(5):11.DOI:10.3788/AOS201939.0528001.
[2] 林敏,刘倩云.一种基于双卡尔曼滤波器实现目标位置预测的方法.CN202210526125.2[2024-02-07].
[3] 陈宝远,孙宇思,陈光毅,等.一种基于卡尔曼滤波的动态目标GPS定位算法[J].哈尔滨理工大学学报, 2016, 21(4):6.DOI:10.15938/j.jhust.2016.04.001.
🎈 部分理论引用网络文献,若有侵权联系博主删除
🎁 关注我领取海量matlab电子书和数学建模资料
👇 私信完整代码和数据获取及论文数模仿真定制
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱船配载优化、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化
2 机器学习和深度学习方面
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN/TCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











