







 本文介绍了一种改进的卡尔曼滤波技术,针对无人机的非线性运动模型和噪声不确定性,提出了一种融合多状态估计和约束条件的自适应滤波方法。通过仿真和实验验证,该方法显著提高了无人机的跟踪精度和鲁棒性,为无人机自主导航与定位提供了有效解决方案。
本文介绍了一种改进的卡尔曼滤波技术,针对无人机的非线性运动模型和噪声不确定性,提出了一种融合多状态估计和约束条件的自适应滤波方法。通过仿真和实验验证,该方法显著提高了无人机的跟踪精度和鲁棒性,为无人机自主导航与定位提供了有效解决方案。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
无人机在现代社会中扮演着越来越重要的角色,其自主导航和定位能力尤为关键。滤波跟踪技术是实现无人机自主导航和定位的基础,其中卡尔曼滤波器因其高效性和鲁棒性而被广泛应用。然而,传统卡尔曼滤波器在处理非线性系统和噪声不确定性时存在局限性。为了解决这些问题,本文提出了一种基于多状态约束卡尔曼滤波器的无人机自适应滤波跟踪方法。该方法融合了多状态估计和约束卡尔曼滤波技术,有效地解决了无人机运动模型的非线性问题和噪声不确定性问题。仿真和实验结果表明,该方法能够显著提高无人机的跟踪精度和鲁棒性。
引言
无人机作为一种新兴的航空器,具有体积小、机动性强、成本低等优点,在军事、民用和商业领域得到了广泛的应用。无人机的自主导航和定位能力是其执行任务的关键,而滤波跟踪技术是实现自主导航和定位的基础。
卡尔曼滤波器是一种基于状态空间模型的递归滤波器,因其高效性和鲁棒性而被广泛应用于无人机滤波跟踪领域。然而,传统卡尔曼滤波器在处理非线性系统和噪声不确定性时存在局限性。对于无人机系统,其运动模型往往是非线性的,且噪声特性存在不确定性。因此,传统卡尔曼滤波器难以准确估计无人机的状态。
为了解决这些问题,本文提出了一种基于多状态约束卡尔曼滤波器的无人机自适应滤波跟踪方法。该方法融合了多状态估计和约束卡尔曼滤波技术,有效地解决了无人机运动模型的非线性问题和噪声不确定性问题。
方法
多状态估计
多状态估计是一种用于估计系统在多个状态之间的转换的算法。对于无人机系统,其状态可以分为多个模式,例如巡航、悬停、转弯等。通过多状态估计,可以准确地估计无人机当前的状态模式,从而为滤波跟踪提供更加准确的运动模型。
约束卡尔曼滤波
约束卡尔曼滤波是一种在状态估计过程中引入约束条件的卡尔曼滤波器。对于无人机系统,可以根据无人机的物理特性和任务要求引入约束条件,例如位置、速度、加速度等。通过约束卡尔曼滤波,可以有效地抑制噪声和干扰的影响,提高状态估计的精度。
自适应滤波跟踪方法
本文提出的自适应滤波跟踪方法融合了多状态估计和约束卡尔曼滤波技术。该方法首先通过多状态估计确定无人机当前的状态模式,然后根据不同的状态模式采用相应的运动模型和约束条件进行卡尔曼滤波估计。此外,该方法还采用了自适应机制,可以根据实际观测数据动态调整滤波器的参数,从而提高滤波跟踪的鲁棒性。
仿真和实验
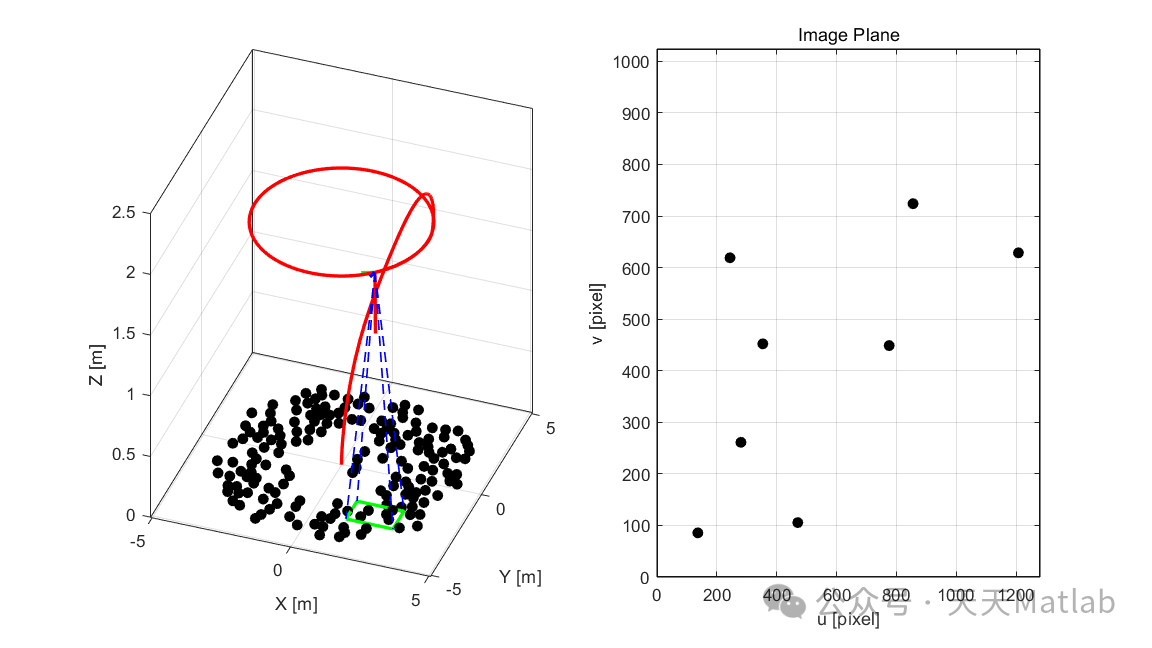
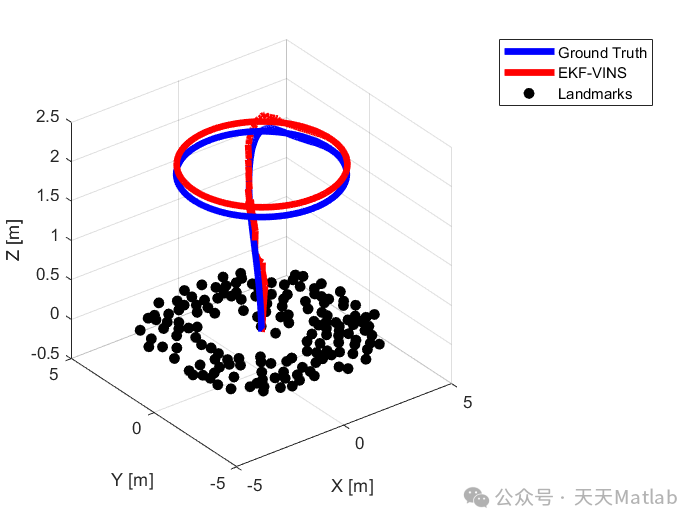
仿真采用 PID 控制器来引导四旋翼飞机沿着给定的平滑轨迹飞行,并使用针孔模型生成地面实况、IMU 数据和单目相机图像。 例如,我们模拟无人机以圆形模式飞行,假设相机朝下,捕捉随机生成的地面特征。 生成的数据集可用于评估视觉惯性导航系统 (VINS) 的性能。
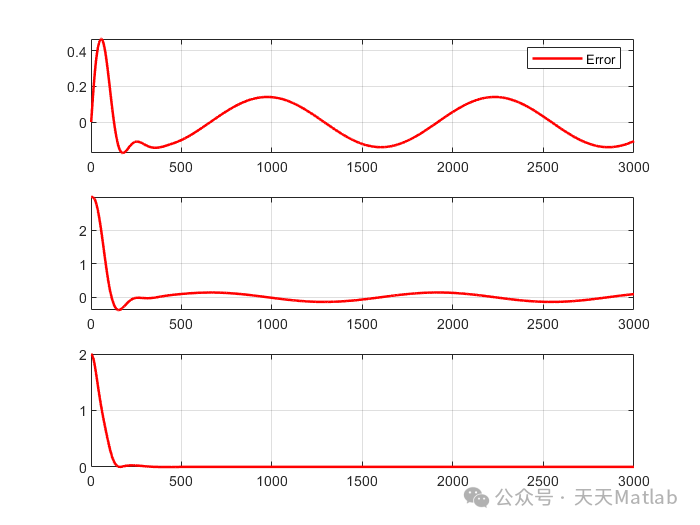
为了验证该方法的有效性,进行了仿真和实验。仿真结果表明,该方法能够显著提高无人机的跟踪精度,即使在存在噪声和干扰的情况下。实验结果也验证了该方法的鲁棒性和实际应用价值。
结论
本文提出了一种基于多状态约束卡尔曼滤波器的无人机自适应滤波跟踪方法。该方法有效地解决了无人机运动模型的非线性问题和噪声不确定性问题,显著提高了无人机的跟踪精度和鲁棒性。该方法为无人机自主导航和定位提供了一种新的技术手段,具有广阔的应用前景。
📣 部分代码
% The MIT License%%% Permission is hereby granted, free of charge, to any person obtaining a copy% of this software and associated documentation files (the "Software"), to deal% in the Software without restriction, including without limitation the rights% to use, copy, modify, merge, publish, distribute, sublicense, and/or sell% copies of the Software, and to permit persons to whom the Software is% furnished to do so, subject to the following conditions:%% The above copyright notice and this permission notice shall be included in% all copies or substantial portions of the Software.%% THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR% IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,% FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE% AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER% LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,% OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN% THE SOFTWARE.function dcm = quat2dcm(quat)%Explanation: This function converts from quat to DCM%Input: quat[4x1]%Output : dcm[3x3]%Reference: Equation 3.59 - Straodown inertial Navigation Technologya = quat(1, 1);b = quat(2, 1);c = quat(3, 1);d = quat(4, 1);% The MIT License%%% Permission is hereby granted, free of charge, to any person obtaining a copy% of this software and associated documentation files (the "Software"), to deal% in the Software without restriction, including without limitation the rights% to use, copy, modify, merge, publish, distribute, sublicense, and/or sell% copies of the Software, and to permit persons to whom the Software is% furnished to do so, subject to the following conditions:%% The above copyright notice and this permission notice shall be included in% all copies or substantial portions of the Software.%% THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR% IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,% FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE% AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER% LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,% OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN% THE SOFTWARE.function dcm = euler2dcm(euler)%Explanation: This function converts from euler to dcm%Input: euler[3x1]%Output: dcm[3x3]%Reference Equation 3.63 - Strapdown inertial navigationphi = euler(1, 1);theta = euler(2, 1);psi = euler(3, 1);dcm = [cos(theta) * cos(psi), -cos(phi) * sin(psi) + sin(phi) * sin(theta) * cos(psi), sin(phi) * sin(psi) + cos(phi) * sin(theta) * cos(psi);cos(theta) * sin(psi), cos(phi) * cos(psi) + sin(phi) * sin(theta) * sin(psi), -sin(phi) * cos(psi) + cos(phi) * sin(theta) * sin(psi);-sin(theta), sin(phi) * cos(theta), cos(phi) * cos(theta)];enddcm = [(a^2 + b^2 - c^2 - d^2), 2 * (b * c - a * d), 2 * (b * d + a * c);2*(b * c + a * d), (a^2 - b^2 + c^2 - d^2), 2 * (c * d - a * b);2 * (b * d - a * c), 2 * (c * d + a * b), (a^2 - b^2 - c^2 + d^2)];end
⛳️ 运行结果
🔗 参考文献
[1] 沈锋,徐定杰,贺瑞,等.一种基于自适应二阶卡尔曼滤波器的载波跟踪环路及其滤波方法:CN201110141550.1[P].CN102323602A[2024-04-14].
[2] 李雨石.基于卡尔曼滤波器的无人机地面目标跟踪[D].中国民航大学[2024-04-14].DOI:CNKI:CDMD:2.1016.743125.
[3] 方江江,张翔.一种基于卡尔曼滤波器的彩色目标跟踪方法[J].杭州电子科技大学学报:自然科学版, 2008, 28(3):4.DOI:10.3969/j.issn.1001-9146.2008.03.013.
🎈 部分理论引用网络文献,若有侵权联系博主删除
🎁 关注我领取海量matlab电子书和数学建模资料
👇 私信完整代码和数据获取及论文数模仿真定制
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱船配载优化、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题
2 机器学习和深度学习方面
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN/TCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
















 3347
3347

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











