






读写备份寄存器&实时时钟
读写备份寄存器

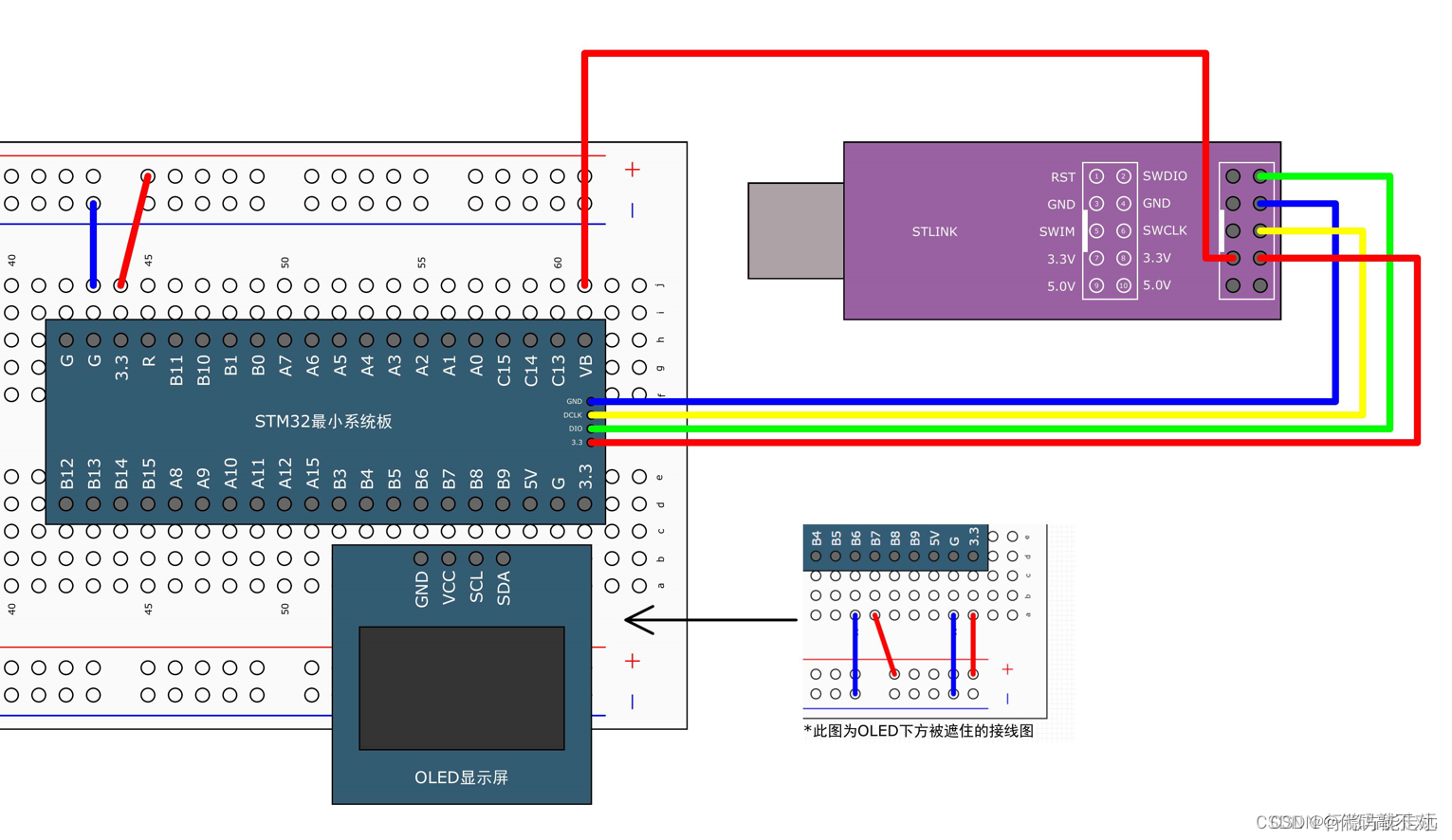
VBAT接STKINL的3.3V引脚,PB1接按键。
BKP初始化步骤:
第一步,开启PWR和BKP的时钟
第二步,使用PWR_CR的DBP函数,使能对BKP和RTC的访问。
第三步,写入数据,使用BKP写入数据函数;读取数据,使用BKP读取数据函数。
BKP常用库函数:
void BKP_DeInit(void); // 恢复缺省配置,将所有配置清0 纽扣电池一直有电后不会自动清0的。
// 用于Tamper侵入检测功能
void BKP_TamperPinLevelConfig(uint16_t BKP_TamperPinLevel); // 侵入检测功能 配置Tamper引脚有效电平高电平、低电平触发
void BKP_TamperPinCmd(FunctionalState NewState); // 是否开启侵入检测功能
void BKP_ITConfig(FunctionalState NewState); // 配置中断
void BKP_RTCOutputConfig(uint16_t BKP_RTCOutputSource); // 时钟输出功能的配置 可以选择在RTC引脚上输出时钟信号 输出RTC校准时钟RTC闹钟脉冲或者秒脉冲
void BKP_SetRTCCalibrationValue(uint8_t CalibrationValue); // 设置RTC校准值(写入RTC校准寄存器)
// 读写BKP
void BKP_WriteBackupRegister(uint16_t BKP_DR, uint16_t Data); //写备份寄存器;第一个参数指定,写在哪个DR里,第二个参数,写入的数据
uint16_t BKP_ReadBackupRegister(uint16_t BKP_DR); //读备份寄存器
FlagStatus BKP_GetFlagStatus(void);
void BKP_ClearFlag(void);
ITStatus BKP_GetITStatus(void);
void BKP_ClearITPendingBit(void);
PWR外设库函数
void PWR_DeInit(void);
void PWR_BackupAccessCmd(FunctionalState NewState); //备份寄存器访问使能 前面讲的设置PWR_CR的DBP,使能对BKP和RTC的访问
void PWR_PVDCmd(FunctionalState NewState);
void PWR_PVDLevelConfig(uint32_t PWR_PVDLevel);
void PWR_WakeUpPinCmd(FunctionalState NewState);
void PWR_EnterSTOPMode(uint32_t PWR_Regulator, uint8_t PWR_STOPEntry);
void PWR_EnterSTANDBYMode(void);
FlagStatus PWR_GetFlagStatus(uint32_t PWR_FLAG);
void PWR_ClearFlag(uint32_t PWR_FLAG);
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Key.h"
uint8_t KeyNum; //定义用于接收按键键码的变量
uint16_t ArrayWrite[] = {0x1234, 0x5678}; //定义要写入数据的测试数组
uint16_t ArrayRead[2]; //定义要读取数据的测试数组
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
Key_Init(); //按键初始化
/*显示静态字符串*/
OLED_ShowString(1, 1, "W:");
OLED_ShowString(2, 1, "R:");
/*1.开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE); //开启PWR的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP, ENABLE); //开启BKP的时钟
/*2.备份寄存器访问使能*/
PWR_BackupAccessCmd(ENABLE); //使用PWR开启对备份寄存器的访问
while (1)
{
KeyNum = Key_GetNum(); //获取按键键码
if (KeyNum == 1) //按键1按下
{
ArrayWrite[0] ++; //测试数据自增
ArrayWrite[1] ++;
BKP_WriteBackupRegister(BKP_DR1, ArrayWrite[0]); //3.写入测试数据到备份寄存器
BKP_WriteBackupRegister(BKP_DR2, ArrayWrite[1]); //把ArrayWrite[1]的值写入到BKP_DR2里
OLED_ShowHexNum(1, 3, ArrayWrite[0], 4); //显示写入的测试数据
OLED_ShowHexNum(1, 8, ArrayWrite[1], 4);
}
//当按键没有按下,也不断读取DR1和DR2,刷新显示到OLED上
ArrayRead[0] = BKP_ReadBackupRegister(BKP_DR1); //读取备份寄存器的数据
ArrayRead[1] = BKP_ReadBackupRegister(BKP_DR2);
OLED_ShowHexNum(2, 3, ArrayRead[0], 4); //显示读取的备份寄存器数据
OLED_ShowHexNum(2, 8, ArrayRead[1], 4);
}
}
程序现象: 读取的数据和写入的一样
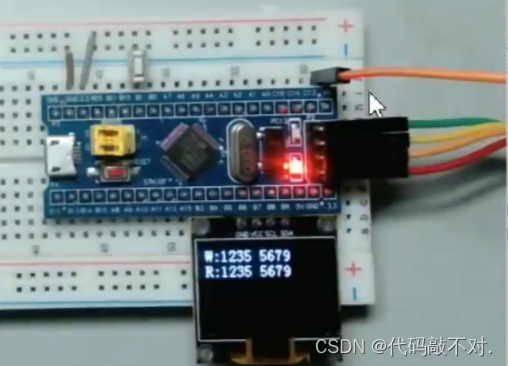
之后,主电源掉电,再重新上电,目前上电后,还没有写入。读取的值,是掉电前最后一次写入数据的值。

RTC实时时钟
初始化流程:
第一步,开启PWR和BKP的时钟
第二步,使用PWR_CR的DBP函数,使能对BKP和RTC的访问。
第三步,启动RTC时钟的LSE时钟,LSE时钟,默认关闭,需要手动开启。
第四步,配置RTCCLK数据选择器,指定LSE为RTCCLK。
第五步,调用两个等待函数,一个等待同步,另一个等待上一次操作完成。(1.若在读取RTC寄存器时,RTC的APB1接口曾经处于禁止状态,则软件首先必须等待RTC_CRL寄存器中的RSF位(寄存器同步标志)被硬件置1)。(2.对RTC任何寄存器的写操作,都必须在前一次写操作结束后进行。可以通过查询RTC_CR寄存器中的RTOFF状态位,判断RTC寄存器是否处于更新中。仅当RTOFF状态位是1时,才可以写入RTC寄存器)。
第六步,配置预分频器,给PRL重装寄存器一个合适的分频值,以确保输出给计数器的频率是1Hz。
第七步,配置CNT的值,给这个RTC一个初始时间。如需要闹钟,配置闹钟值;如需要中断,配置中断。
RTC库函数
void RCC_LSEConfig(uint8_t RCC_LSE); // 启动LSE时钟
void RCC_LSICmd(FunctionalState NewState); // 配置LSI内部低速时钟
void RCC_RTCCLKConfig(uint32_t RCC_RTCCLKSource); // 配置CLK时钟源,数据选择器
void RCC_RTCCLKCmd(FunctionalState NewState); // 启动RCCCLK;调用完函数时钟后,再调用RTCCLKCmd使能
void RCC_GetClocksFreq(RCC_ClocksTypeDef *RCC_Clocks);
void RCC_AHBPeriphClockCmd(uint32_t RCC_AHBPeriph, FunctionalState
NewState);
void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState
NewState);
void RCC_APB1PeriphClockCmd(uint32_t RCC_APB1Periph, FunctionalState
NewState);
FlagStatus RCC_GetFlagStatus(uint8_t RCC_FLAG); // 获取标志位(LSE时钟不是调用完就立马启动的,需等待一下标志位,等RCC的LSERDY标志位置1后,时钟才算启动完成。)
main.c
void RTC_ITConfig(uint16_t RTC_IT, FunctionalState NewState); // RTC中断配置输出
void RTC_EnterConfigMode(void); // 进入配置模式 必须设置RTC_CRL寄存器中的CNF位为1,使RTC进入配置模式后,才能写入RTC_PRL、RTC_CNT、RTC_ALR寄存器
RTC_CRL_CNF = 1 void RTC_ExitConfigMode(void); // 退出配置模式 就是把CNF位清0
uint32_t RTC_GetCounter(void); // 获取CNT计数器的值 读取时钟靠这个函数
void RTC_SetCounter(uint32_t CounterValue); // 写入CNT计数器的值设置时间
void RTC_SetPrescaler(uint32_t PrescalerValue); // PSC 预分频器分频系数
void RTC_SetAlarm(uint32_t AlarmValue); // 写入闹钟值
uint32_t RTC_GetDivider(void); // 读取DIV余数寄存器 是一个自减计数器,获取余数寄存器的值,是为了得到更细致的时间,因为CNT计数间隔最短就是1S,如更细的时间,分秒、毫秒要用到
void RTC_WaitForLastTask(void); // 等待上一次操作完成(前面讲的等待RTOFF状态为1)
void RTC_WaitForSynchro(void); // 等待同步(前面讲的等待RSF标志位置1)
//标志位相关的函数
FlagStatus RTC_GetFlagStatus(uint16_t RTC_FLAG);
void RTC_ClearFlag(uint16_t RTC_FLAG);
ITStatus RTC_GetITStatus(uint16_t RTC_IT);
void RTC_ClearITPendingBit(uint16_t RTC_IT);
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MyRTC.h"
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
MyRTC_Init(); //RTC初始化
/*显示静态字符串*/
OLED_ShowString(1, 1, "Date:XXXX-XX-XX");
OLED_ShowString(2, 1, "Time:XX:XX:XX");
OLED_ShowString(3, 1, "CNT :");
OLED_ShowString(4, 1, "DIV :");
while (1)
{
MyRTC_ReadTime(); //RTC读取时间,最新的时间存储到MyRTC_Time数组中
OLED_ShowNum(1, 6, MyRTC_Time[0], 4); //显示MyRTC_Time数组中的时间值,年
OLED_ShowNum(1, 11, MyRTC_Time[1], 2); //月
OLED_ShowNum(1, 14, MyRTC_Time[2], 2); //日
OLED_ShowNum(2, 6, MyRTC_Time[3], 2); //时
OLED_ShowNum(2, 9, MyRTC_Time[4], 2); //分
OLED_ShowNum(2, 12, MyRTC_Time[5], 2); //秒
OLED_ShowNum(3, 6, RTC_GetCounter(), 10); //显示32位的秒计数器
OLED_ShowNum(4, 6, RTC_GetDivider(), 10); //显示余数寄存器
}
}
MyRTC.c
#include "stm32f10x.h" // Device header
#include <time.h>
uint16_t MyRTC_Time[] = {2023, 1, 1, 23, 59, 55}; //定义全局的时间数组,数组内容分别为年、月、日、时、分、秒
void MyRTC_SetTime(void); //函数声明
/**
* 函 数:RTC初始化
* 参 数:无
* 返 回 值:无
*/
void MyRTC_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE); //开启PWR的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP, ENABLE); //开启BKP的时钟
/*备份寄存器访问使能*/
PWR_BackupAccessCmd(ENABLE); //使用PWR开启对备份寄存器的访问
if (BKP_ReadBackupRegister(BKP_DR1) != 0xA5A5) //通过写入备份寄存器的标志位,判断RTC是否是第一次配置。0xA5A5随便的数据当标志位//对BKP 写入数据,如上电检测,数据没清0,表示备用电池存在。这样就不再初始化,重新设置时间。如上电检测,数据清0,表示系统断电
//if成立则执行第一次的RTC配置
{
RCC_LSEConfig(RCC_LSE_ON); //开启LSE时钟
while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) != SET); //等待LSE准备就绪
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE); //选择RTCCLK来源为LSE
RCC_RTCCLKCmd(ENABLE); //RTCCLK使能
RTC_WaitForSynchro(); //等待同步
RTC_WaitForLastTask(); //等待上一次操作完成
//配置RTC预分频器,LSE频率是32768hz。分频系数:32768 - 1。减1是因为计数值包含0
RTC_SetPrescaler(32768 - 1); //设置RTC预分频器,预分频后的计数频率为1Hz
RTC_WaitForLastTask(); //等待上一次操作完成
MyRTC_SetTime(); //设置时间,调用此函数,全局数组里时间值刷新到RTC硬件电路
BKP_WriteBackupRegister(BKP_DR1, 0xA5A5); //在备份寄存器写入自己规定的标志位,用于判断RTC是不是第一次执行配置
}
else //RTC不是第一次配置
{
RTC_WaitForSynchro(); //等待同步
RTC_WaitForLastTask(); //等待上一次操作完成
}
}
//如果LSE无法起振导致程序卡死在初始化函数中
//可将初始化函数替换为下述代码,使用LSI当作RTCCLK
//LSI无法由备用电源供电,故主电源掉电时,RTC走时会暂停
/*
void MyRTC_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
if (BKP_ReadBackupRegister(BKP_DR1) != 0xA5A5)
{
RCC_LSICmd(ENABLE);
while (RCC_GetFlagStatus(RCC_FLAG_LSIRDY) != SET);
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSI);
RCC_RTCCLKCmd(ENABLE);
RTC_WaitForSynchro();
RTC_WaitForLastTask();
RTC_SetPrescaler(40000 - 1);
RTC_WaitForLastTask();
MyRTC_SetTime();
BKP_WriteBackupRegister(BKP_DR1, 0xA5A5);
}
else
{
RCC_LSICmd(ENABLE); //即使不是第一次配置,也需要再次开启LSI时钟
while (RCC_GetFlagStatus(RCC_FLAG_LSIRDY) != SET);
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSI);
RCC_RTCCLKCmd(ENABLE);
RTC_WaitForSynchro();
RTC_WaitForLastTask();
}
}*/
/**
* 函 数:RTC设置时间
* 参 数:无
* 返 回 值:无
* 说 明:调用此函数后,全局数组里时间值将刷新到RTC硬件电路
*/
void MyRTC_SetTime(void) // 1.把数组指定的时间,填充到structure tm结构体里
//2.使用mktime函数,得到秒数
//3.将秒数写入到RTC的CNT中
{
time_t time_cnt; //定义秒计数器数据类型
struct tm time_date; //定义日期时间数据类型
time_date.tm_year = MyRTC_Time[0] - 1900; //将数组的时间赋值给日期时间结构体。年要减去一个偏移量1900
time_date.tm_mon = MyRTC_Time[1] - 1; //月减去1
time_date.tm_mday = MyRTC_Time[2];
time_date.tm_hour = MyRTC_Time[3];
time_date.tm_min = MyRTC_Time[4];
time_date.tm_sec = MyRTC_Time[5];
time_cnt = mktime(&time_date) - 8 * 60 * 60; //调用mktime函数,将日期时间转换为秒计数器格式
//- 8 * 60 * 60为东八区的时区调整。-8小时
RTC_SetCounter(time_cnt); //将秒计数器写入到RTC的CNT中
RTC_WaitForLastTask(); //等待上一次操作完成
}
/**
* 函 数:RTC读取时间
* 参 数:无
* 返 回 值:无
* 说 明:调用此函数后,RTC硬件电路里时间值将刷新到全局数组
*/
void MyRTC_ReadTime(void) //1.RTC_GetCounter,读取CNT的秒数,存储到time_cnt里
//2.使用localtime函数,得到日期时间
//把time_date的日期时间,转移到数组里
{
time_t time_cnt; //定义秒计数器数据类型
struct tm time_date; //定义日期时间数据类型
time_cnt = RTC_GetCounter() + 8 * 60 * 60; //读取RTC的CNT,获取当前的秒计数器
//+ 8 * 60 * 60s为东八区的时区调整。+8个小时的偏移 变为北京时间
time_date = *localtime(&time_cnt); //使用localtime函数,将秒计数器转换为日期时间格式
MyRTC_Time[0] = time_date.tm_year + 1900; //将日期时间结构体赋值给数组的时间
MyRTC_Time[1] = time_date.tm_mon + 1;
MyRTC_Time[2] = time_date.tm_mday;
MyRTC_Time[3] = time_date.tm_hour;
MyRTC_Time[4] = time_date.tm_min;
MyRTC_Time[5] = time_date.tm_sec;
}
MyRTC.h
#ifndef __MYRTC_H
#define __MYRTC_H
extern uint16_t MyRTC_Time[];
void MyRTC_Init(void);
void MyRTC_SetTime(void);
void MyRTC_ReadTime(void);
#endif
程序现象
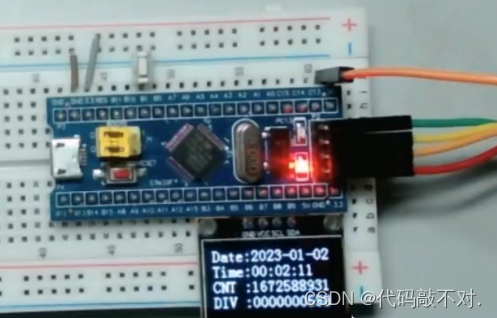
最后一个DIV正在快速的自减,自减的范围是32767~0,DIV每自减一轮,CNT秒数加1,有了这个数我们就可以对秒数进行更细的划分,获取分秒厘秒毫秒这些参数。















 1358
1358











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









