








 超级会员免费看
超级会员免费看

论文地址:Excellent-Paper-For-Daily-Reading/application/centerline at main
应用:应用——中心线
时间:2023/11/07
摘要
线激光条纹中心线提取的精度和速度是线激光三维测量技术的关键,针对现有的激光条纹中心提 取方法在速度快和精度高之间的矛盾,提出一种改进细化法的线激光条纹中心线提取方法。首先对图像进行 滤波操作,阈值分割,再基于改进的细化算法,对提取中心进行冗余去除和补线处理,实现了线激光条纹中心快速和高精度的提取。通过实验结果表明,相比灰度重心法,所提方法在精度上提高近 1 倍,相较于 Steger 算法,在运行速度上提高近 15 倍。因此,所提算法具有复杂度低,且具有提取速度和精度高的优点。
传统细化法
线激光头投射到物体表面时,会发生漫散射,会产生一些噪声,类似于椒盐噪声,导致图像质量不佳。因此,为获得更好的图像质量,要进行滤波去噪。常见的滤波方式有高斯滤波,均值滤波,中值滤波等。采用适合去除椒盐噪声效果较好的中值滤波方法进行滤波处理。此外,线激光投射出来的激光线灰度值呈高斯分布状,两侧的灰度值相对较小,中间灰度值较高,成单峰状。因此,提取线激光光条纹中心的关键是找到灰度条纹图像的高斯中心,一般情况下,可 以通过阈值分割来寻找高斯中心。迭代阈值法是一 种自适应阈值分割方法,它是通过迭代方法来求出最佳的阈值。通过迭代阈值法将目标区域与背景区域分离出来,阈值分割后利用细化法提取线激光中心。
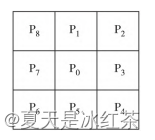
与 P0 相邻的 8 个邻 域所组成的像素点集合称为像素点的 8 邻域,P0 到 P8 顺时针排序。根据全局图像像素点进行 8 邻域运算,重复执行逻辑运算,遇到符合非骨架点的删除条件时,对像素进行标记,在遍历完全部图像像素之后再统一执行删除操作。分为 2 个并行子过程:
子过程 1: 若同时满足以下 4 个条件,则标记 P0 为可删除点。
(1)1<N( p0) <7
(2)N(p0) = 1
(3)p1×p5×p7 = 0
(4)p1×p3×p7 = 0
条件 1 判断 P0 是否为端点,条件 2 检测 P0 的 8 邻域是否有 0 到 1 之间的变化,保证骨架像素点不被标记。条件 3 标记 8 邻域东南边的非骨架像素点。条件 4 标记 8 邻域西北边的非骨架像素点。
子过程 2: 若同时满足以下四个条件,则标记 P0 为可删除的点。
(1)1<N( p0 ) <7
(2)N( p0 ) = 1
(3)p1×p3×p5 = 0
(4)p3×p5×p7 = 0
子过程 2 中条件 1、条件 2 与子过程 1 相同。条件 3 标记 8 邻域西北边的非骨架像素点。条件 4 是标记 8 邻域的东南边的非骨架像素点。算法重复迭代上述两个子过程,对目标图像中的非骨架像素点进行标记。在迭代过程中检测是否有标记的点,若有则继续重复进行迭代过程,否则就删除所有被标记的点,细化算法结束,此时剩下的点所构成的区域即为骨架。
传统细化法优点是细化处理后对图像骨架拓扑信息保存完整,迭代次数相对较少,运算速度快; 但是此算法在处理斜线问题时会出现冗余和毛刺现象,造成骨架提取不完整。
改进细化法
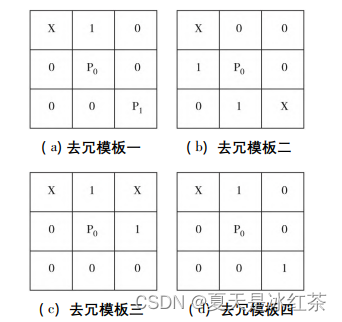
为更好地提取线激光条纹中心,对传统的细化算法做出以下改进,即在原有算法上加上如下图所示的去冗模板。其原理为:
P0 为目标像素点,以目标像素的附近的 8 个像素作为 P0 的邻域,“0”表示背景像素,“1”表示前景像素,X 表示可为“0”或“1”,(a) 、(b) 、(c) 和(d) 分别表示去除的斜线左上方,左下方,右上方,右下方的冗余像素。进行传统细化操作后,再次遍历图像,将目标像素点的 8 邻域与(a) 、(b) 、(c) 和(d) 的去冗模板进行比对,如若符合,则标定为可删除像素点并进行删除。
然而,再加上去冗模板发现:
当斜线处毛刺较为密集时,删除模板在标记删除像素点时,会误删骨架 上的像素点,因此,会导致出现断点现象,导致提取的线激光条纹中心不连续,在此基础上,增加如下图所示的保留模板,来解决这一问题。其原理为 P0为目标 像素点,以 P0 为中心,它以周围的 11 个像素的组成 11 邻域,X 表示“0”或“1”,当遍历图像像素时,目标像素点的 11 邻域符合(a) 、(b) 、(c) 和(d) 中的 11 邻域时,保留该目标像素点。

结合去冗模板和保留模板,所提出的改进细化算法步骤总体描述如下:
步骤一: 遍历目标图像,若像素点 P0 满足传统细化算法子过程 1 和 2 的条件时,标记为可删除标记,待结束后删去该像素点;
步骤二: 判断删除标记,若有可删除标记,转到步骤一,若没有,则跳转下一步;
步骤三: 再次遍历图像,寻找可疑像素点 P0,是否符合去冗模板中的 8 邻域相互匹配,若有匹配,标记为可疑像素,进入可疑像素集合库;
步骤四: 在可疑像素库里进一步判断标记的可疑像素点 P0,若像素 P0 的 11 邻域符合上述所提的保留模板像素中任意一个模板,则保留该像素点; 否则删除这个像素点。直至判断结束,整个细化过程结束。
总结
论文提出一种新的线激光中心提取算法,即改进细化算法,利用传统细化算法进行改进,添加去冗模板和保留模板。所提改进细化算法在提取精度方面和 Steger 算法提取精度相当,在提取速度方面远优于 Steger 算法,提升约 15 倍,相较于灰度重心法精度提升约 1 倍。所提出的改进细化算法实现简单,且具有精度和速度兼顾的特性,可以为在线检测、焊缝追踪、 三维重建技术的应用提供前期基础。
















 2308
2308











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











