







这是一篇适合小白阅读的博客,帮助理解如何使用 CloudCompare 工具计算点云之间的距离,并解释如何评估计算结果。
在测量和分析点云数据时,了解两期点云的偏差或者变化是非常重要的,尤其是在地理信息、建筑物监测等领域。在本篇文章中,我将使用 CloudCompare 这一强大的开源软件来计算两期校园点云数据(分别是 2010 年和 2020 年的 LAS 数据)之间的距离,并通过计算结果帮助我们分析这两期点云的对齐精度。
什么是点云数据?
点云数据是通过激光扫描(LiDAR)或其他 3D 测量方法收集的空间数据,表示物体或场景的表面。每个点云中的“点”都是在三维空间中的一个坐标,通常包含位置(X, Y, Z)信息。通过点云数据,我们可以创建非常精确的地理信息模型。
为什么要计算点云之间的距离?
在点云分析中,计算两期点云之间的距离可以帮助我们:
- 检测变化:判断物体、建筑、地形等在不同时间点的变化。
- 验证对齐:确保两期点云正确对齐,如果有偏差,可以进一步调整。
- 精度评估:通过比较两期点云的差异,评估数据的质量和处理精度。
在这篇文章中,我将使用 CloudCompare 来计算2010年和2020年两期校园点云之间的距离,并分析这些数据。
步骤一:准备数据
有两份点云数据,分别是2010年和2020年的校园点云数据,格式为 LAS。在开始计算之前,我们要确保这两期点云已经对齐。如果数据存在偏差(先做一个粗计算),我们需要使用 CloudCompare 中的配准工具(例如 ICP 配准)对其进行调整。
在 CloudCompare 中加载数据
- 打开 CloudCompare。
- 点击 “文件 > 打开” 来导入你的 2010.las 和 2020.las 点云数据。
- 确保两期点云位于同一坐标系,并大体上对齐。(放大点云视图,切换数据时,基本重叠即可)
步骤二:计算点云之间的距离
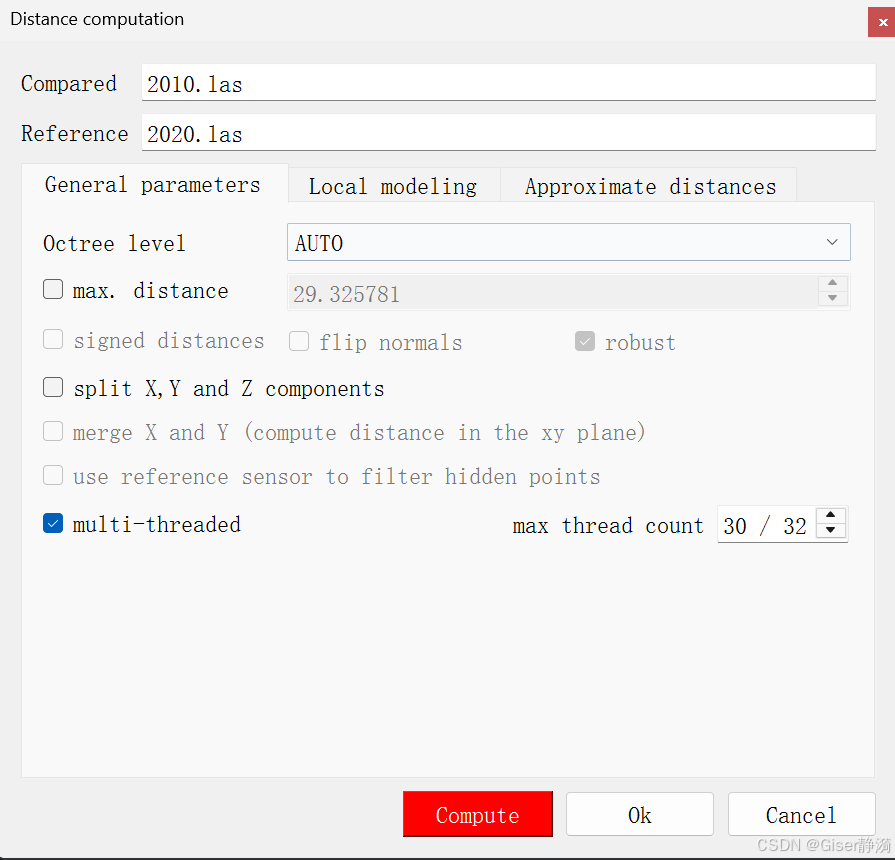
- 选择 2010.las 作为“对比点云”(Compared),选择 2020.las 作为“参考点云”(Reference)。
- 在菜单栏选择 Tools > Distances > Cloud-to-Cloud Distance。
- 在弹出的窗口中,你会看到多个参数设置,主要包括:
- Octree level(八叉树级别):CloudCompare 会自动选择适当的分辨率,通常保留 AUTO 即可。
- Max Distance(最大距离):如果你知道点云之间的最大变化不会超过某个数值,可以设置最大距离进行筛选。在此例中,我们不勾选该项,以免丢失有效数据。
- Robust:启用后,CloudCompare 会对点云进行稳健处理,排除离群点对结果的影响。建议勾选。
我的数据量很小,密度不错,用默认参数即可。
参数解释:
- Octree level:这是一个控制点云分辨率的参数。Octree 是一种空间数据结构,用于优化点云的计算。如果你的点云非常密集,Octree level 设置得较高可以更精确地计算距离,但计算量也会增大。一般情况下,CloudCompare 会自动设置这个参数,但你也可以手动调整。
- Max Distance:这个参数用于设置计算中允许的最大距离。如果某些点的距离超出了这个阈值,它们会被忽略。这个功能对于排除那些由于噪声或数据偏差导致的异常点非常有用。比如,如果你知道两期点云的最大变化不会超过 10 米,可以设置最大距离为 10 米来加速计算。
- Robust:提高计算的稳定性,避免噪声和离群点影响结果。
步骤三:分析计算结果
结果输出
[23:29:46] [ComputeDistances] Mean distance = 0.634018 / std deviation = 1.41546
在完成计算后,CloudCompare 会生成以下几个重要的结果:
-
Mean Distance(平均距离):这是所有对比点云与参考点云之间的平均距离。我们得到的结果是 0.634018,即平均偏差约为 0.63 cm。这个值表示,2010年和2020年这两期点云的大多数点之间的偏差约为 0.63 cm,即它们大体上对齐。
-
Standard Deviation(标准差):标准差为 1.41546,表示两期点云之间的距离波动较大,某些区域的误差大于平均值。这个值表明,虽然两期点云的大部分点偏差较小,但也有一些点的偏差较大,可能是由于数据噪声或局部对齐不完全导致的。
参数解释
-
平均距离(Mean Distance):这个值代表了所有对比点云与参考点云之间的平均偏差。如果你计算出平均距离较小(如几厘米),说明两期点云大体对齐;如果平均距离很大,说明可能存在对齐不完全的情况,需要进一步调整配准。
-
标准差(Standard Deviation):标准差表示的是所有点的距离分布情况。标准差较小表示大多数点的偏差都比较接近平均值,说明点云对齐效果较好;而标准差较大则意味着一些区域的偏差较大,可能存在配准不精确的地方。
步骤四:优化结果
1、如果当前的对齐精度满足任务要求,可以继续进行点云变化检测(如 M3C2)。
2、如果标准差较大且影响较多,建议进一步优化点云的对齐过程。可以尝试使用更精确的配准方法(如 ICP 或增加配准点)或者通过手动调整对齐进行优化。
如果标准差较大,表示某些区域的对齐精度较差。这时,我们可以:
- 使用 ICP 配准 进行更精确的点云对齐。
- 调整 Octree level 和 Max Distance,优化计算过程。
- 在 CloudCompare 中再次计算并检查结果,直到得到较小的标准差和满意的对齐精度。
希望这篇博客能帮助你更好地理解点云分析的基本操作和评估方法。如果你有任何问题,欢迎在评论区留言,我会尽力为你解答!

















 1941
1941

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









