







ROS学习:环境搭建
在Ubuntu20.04系统中,搭建noetic环境。
官方资料:
https://wiki.ros.org/noetic/Installation/Ubuntu
顺序执行以下所有指令
获取软件包
这里使用清华的镜像源,可以在https://wiki.ros.org/noetic/Installation/Ubuntu里寻找其他镜像源使用。
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
更新 安装
sudo apt-get update
sudo apt install curl
wget http://packages.ros.org/ros.key
sudo apt-key add ros.key
sudo apt-get update --fix-missing
sudo apt install ros-noetic-desktop-full
sudo apt update
设置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
启动ROS
roscore
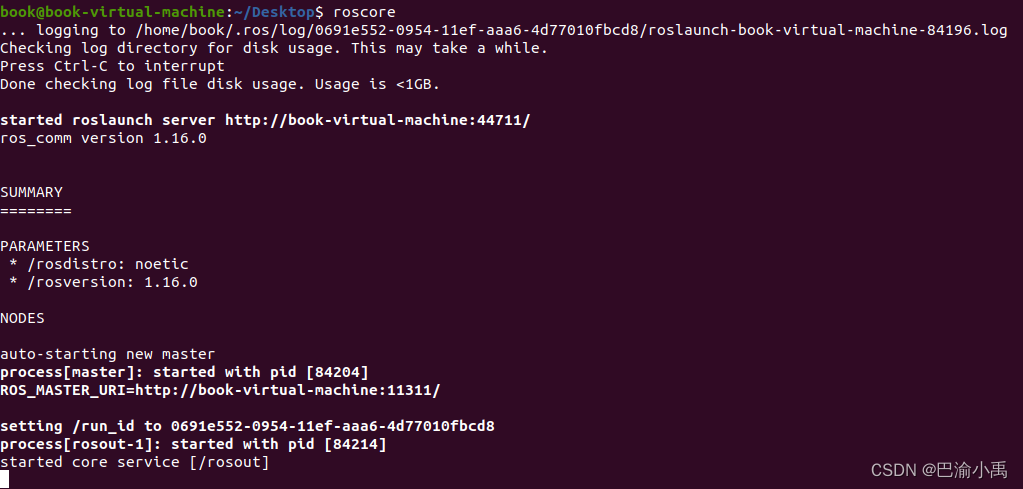
出现如图,则安装成功。ctrl+c退出进行后续命令。
ROS依赖包工具初始化
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
rosdep 资源文件更改为国内地址
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
初始化并更新 rosdep
sudo rosdep init
rosdep update















 9984
9984

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









