






 文章讲述了如何为游戏中的静态网格体模型设置碰撞,以避免角色穿过物体。通过调整碰撞复杂程度和在详情及细节面板中设置,可以解决穿透问题。此外,介绍了如何通过合并Actor功能,将多个静态网格体整合为一个整体,便于在新关卡中复用,提高工作效率。
文章讲述了如何为游戏中的静态网格体模型设置碰撞,以避免角色穿过物体。通过调整碰撞复杂程度和在详情及细节面板中设置,可以解决穿透问题。此外,介绍了如何通过合并Actor功能,将多个静态网格体整合为一个整体,便于在新关卡中复用,提高工作效率。
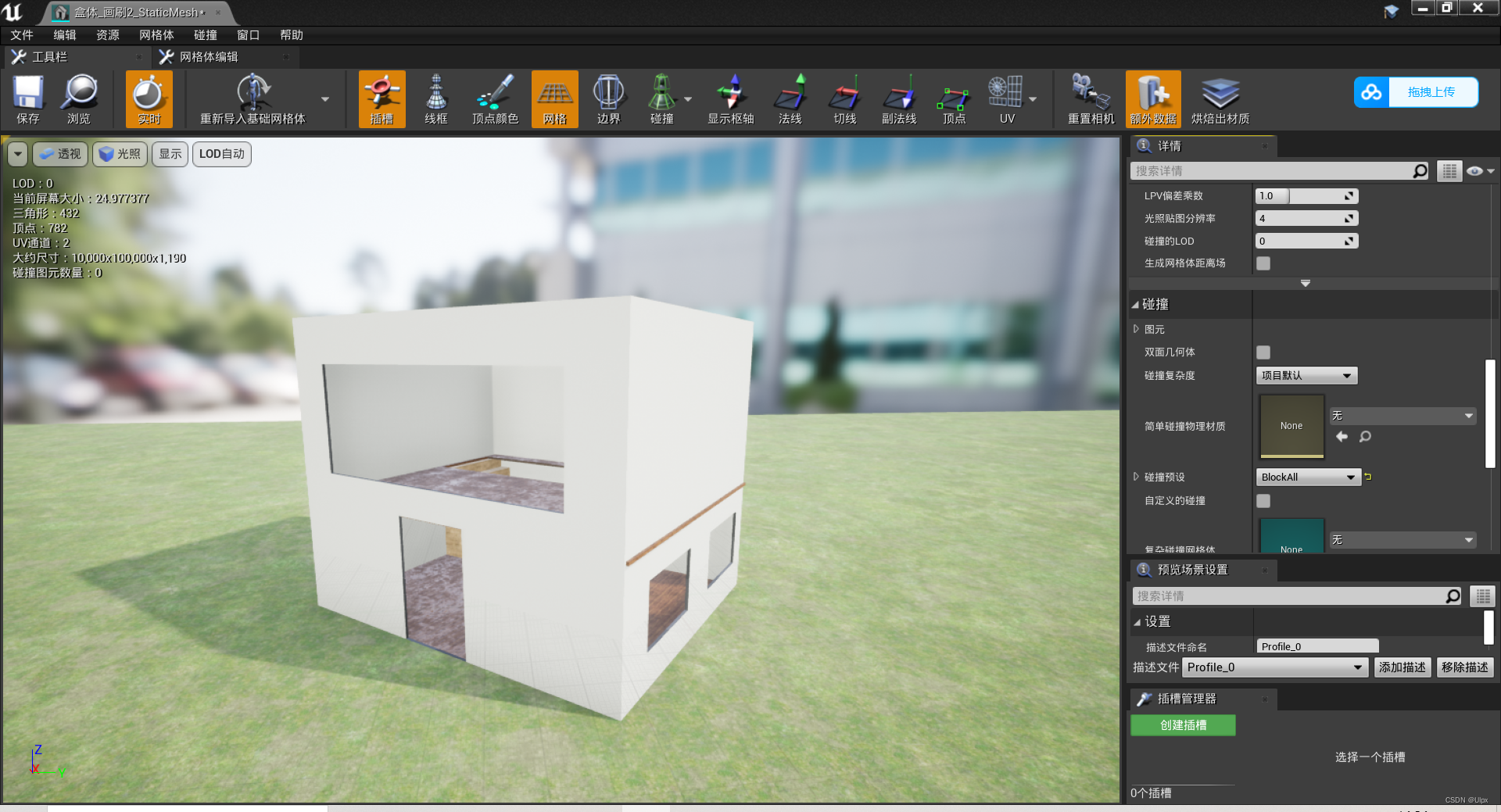
上一期学到把构建好的房子模型变成一个静态网格体(也是一个模型)
但是静态网格体是没有碰撞的 所以要给这个模型设置碰撞
静态网格模型碰撞设置
1.双击创建好的静态网格体
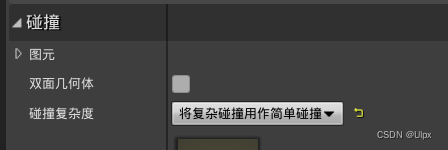
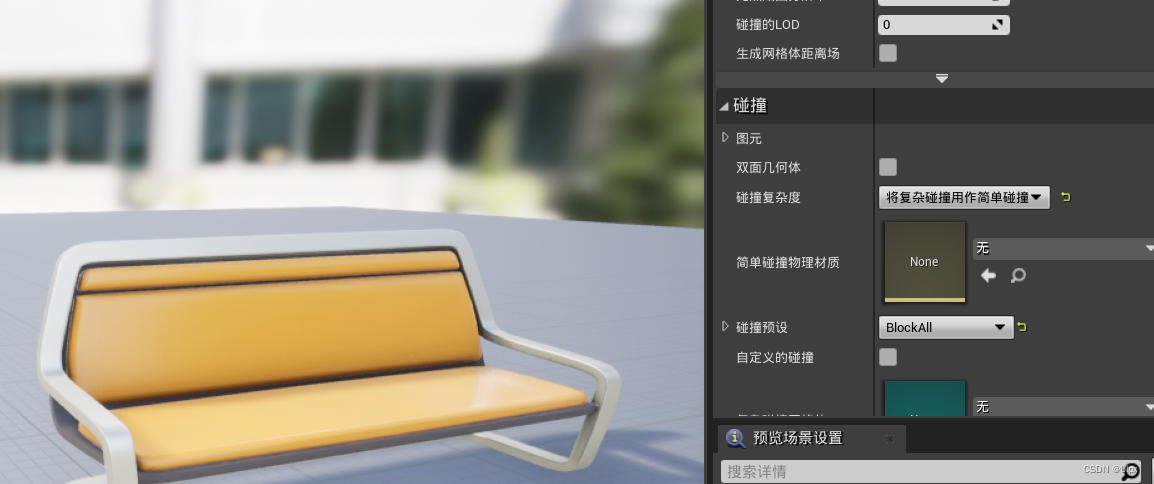
2.在左上方的详情面板中找到碰撞
3.找到碰撞复杂程度---选择第四个 将复杂碰撞用作简单碰撞
当播放演示时,会发现人物会穿过沙发
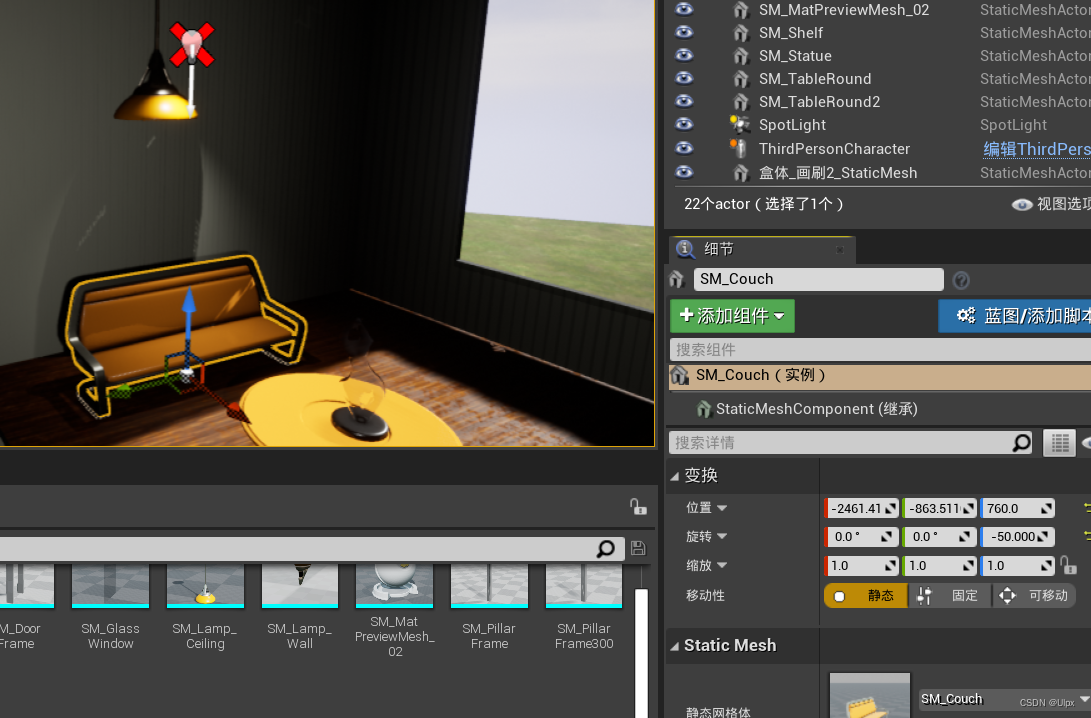
1.找到右边的细节面板
2. 找到Static Mesh
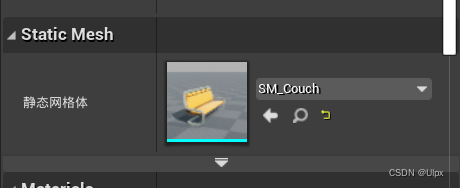
3.双击静态网格体模型
4.就可以设置碰撞类型了
5.修改之后,人物模型就不会再穿过沙发了
合并Actor(合并静态网格体)
在点击隐藏后会发现 沙发椅子那些是无法隐藏掉的,如果想要这些模型和房子一起变成一个整体,则可以:
1.在世界大纲中搜索Static Mesh---ctrl+a全选所有的静态网格模型

2.选择窗口---点击开发者工具---合并Actor
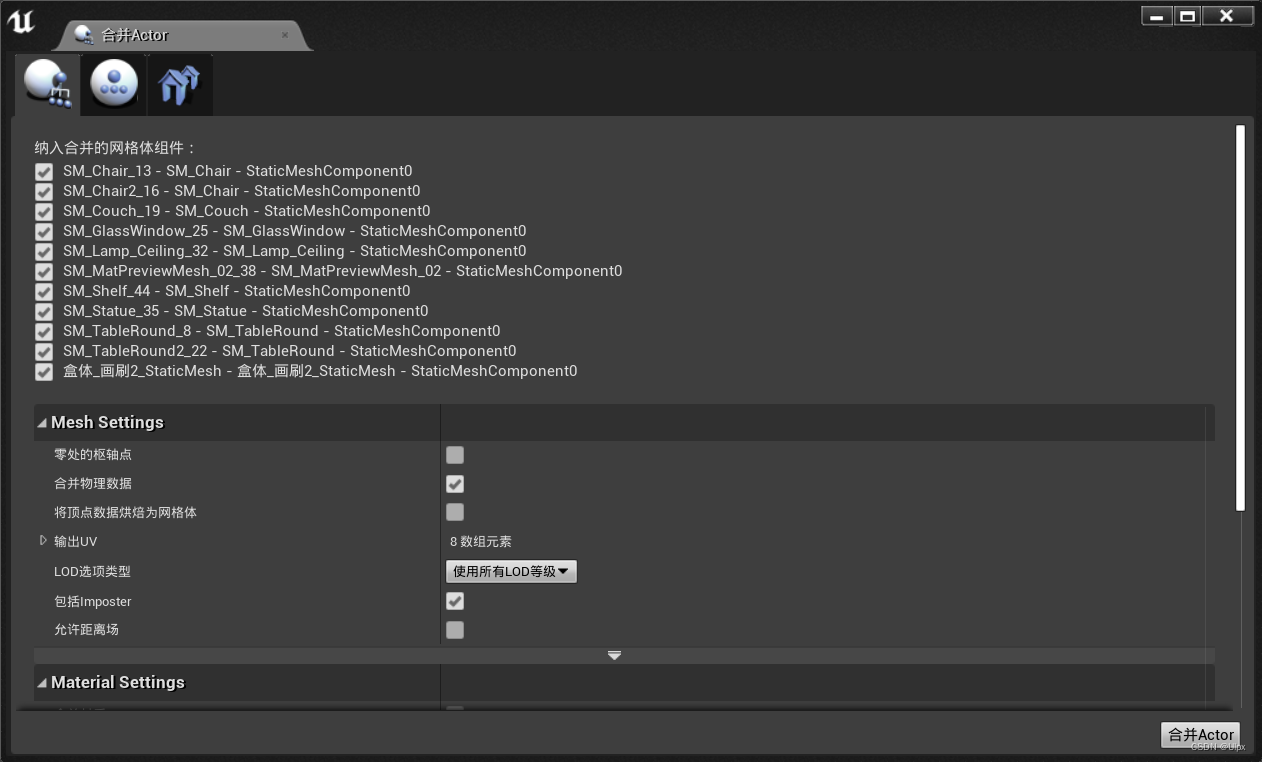
3.点击合并actor 创建一个具有所有模型的静态网格体

 合并actor在于 当制作一个新的关卡需要用到之前所做的一些模型时,可以直接拖拽静态网格体到视口中去,十分方便
合并actor在于 当制作一个新的关卡需要用到之前所做的一些模型时,可以直接拖拽静态网格体到视口中去,十分方便
//ok!!第六章的学习终于结束!重开一篇开始第七章(地形工具的使用吧)

















 1384
1384

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









