






一.什么是FMCW雷达
首先什么是FMCW雷达呢,调频连续波雷达,顾名思义,就是可以发射周期性宽带FM脉冲,频率在脉冲期间线性增加,单个FMCW脉冲可以写成

![]()
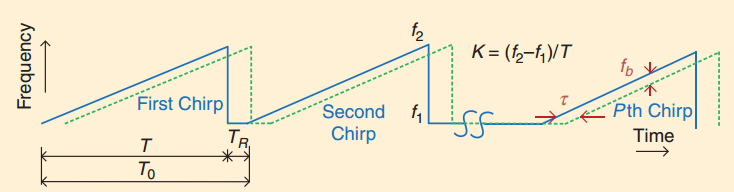
注意,这是一幅时频图像,而不是常见的时域图或频谱图

至于为什么要用拍频,主要是因为我们还要测速度,就是测出多普勒频率,用拍频的话会更简便,后面会讲
注:Chrip可以翻译为脉冲或啁啾,意思就是一个周期的脉冲
二.FMCW雷达怎么测距离速度和角度
2.1 发射信号与接收信号模型
接下来,FMCW是怎么探测物体的距离、速度和角度的呢?其实我们接收到回波后不会直接对回波做处理,而是会把回波和发射信号做共轭混合(conjugately mix),其实就是类似于混频,理论上,两个信号在时频图像上只有相位不一样(就像上图所示),但实际上会有衰减、噪声干扰,接收到的信号可以模型化表示为

其中α是一个复标量,其幅度表示由于天线增益、路径损耗和目标的RCS引起的衰减,可以理解为衰减系数
𝜏是延时,这个不必多说
ω(t)是具有零均值和方差的加性高斯白噪声,实际噪声可能更复杂,但是我们先理想化
2.2 雷达接收机的共轭混合(混频)处理
我们的共轭混合处理之前肯定有去噪、滤波、放大等处理,中间常用匹配滤波等过程,我们只关心共轭混合的结果
其实共轭混合的过程就是把混频,然后滤除高频分量,得到低频拍频信号
我们假设经过处理,接收到的信号是s(t−τ)而发射信号是s(t)
然后把它们做混频
![]()
![]()
![]()

混频方式很多,可以先让它们相乘,然后可以做一个类似于积化和差的运算,使得表达式里有一个低频量以及一个高频量,低频量只和τ有关(积化和差的差),就是因为τ才出现的。也可以先相加再平方,然后滤波,也可以做到混频的结果。
2.3 雷达接收机输出数据表达式
做完这整个处理,再采样,我们就可以得到最关键的表达式,也就是FMCW雷达接收机输出的表达式

其中自变量有两个,n和p,但是正常情况下只有一个就是时间t,或者离散的采样点n
这里就是FMCW雷达在处理数据的时候,分出了一个快时间n,和慢时间p(事实上,很多雷达都有这样的规定)
2.3.1 快时间和慢时间理解
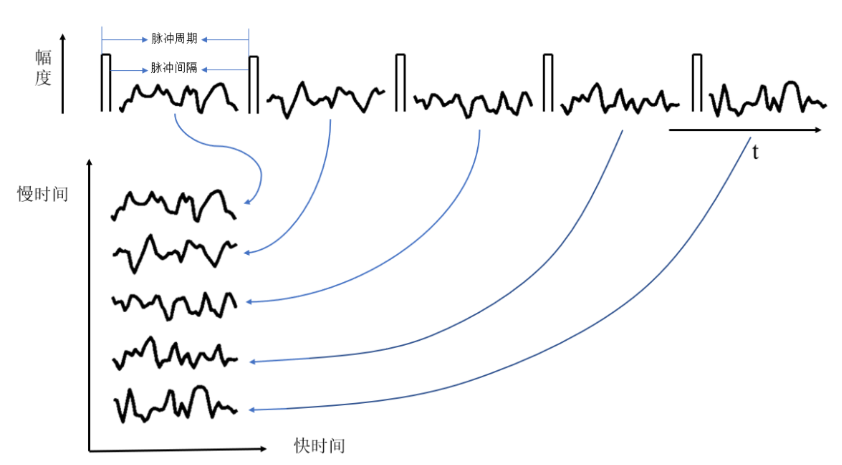
快时间:因为FMCW雷达在发射信号的时候发射的是一个个的脉冲,就是发射一段脉冲,然后休息,等待回波接收,然后再发射下一个脉冲,重复这样的过程,由于脉冲本质上是电磁波,以光速传播,非常快,相比于发射脉冲的周期和间隔,来回的时间很短很短(回波间隔比发射间隔小了好几个数量级),所以我们把一个脉冲内的n个采样称为快时间(时间过得很快,就是时间很短很短),在快时间内,移动的物体也可以看作静止,所以快时间用来测量物体的距离。
慢时间:假设一共发射了p个脉冲,每个脉冲的间隔就是周期,前面说过,这个时间相比于电磁波来回的时间太长了,所以我们把每个脉冲作为慢时间维度(时间过得很慢,也就是相比于快时间很长),慢时间主要用来和快时间一起测量物体的速度。
那么假设我们有组雷达信号,读取的时候就是这样的:读到第p个脉冲(慢时间),在第p个脉冲内的第n个采样点值是多少(快时间),我们可以把雷达接收机处理后的数据看作一个矩阵,横坐标是快时间,纵坐标是慢时间,如下图所示
2.3.2 数据输出表达式整体理解
回到FMCW雷达接收机处理后的数据输出表达式


那么我们为了便于理解,把上式做一个整理
![]()
对比一下

![]()

2.4 从数据中如何提取距离和速度量----傅里叶变换
我们现在有了这样的数据矩阵d(n, p)

![]()
![]()

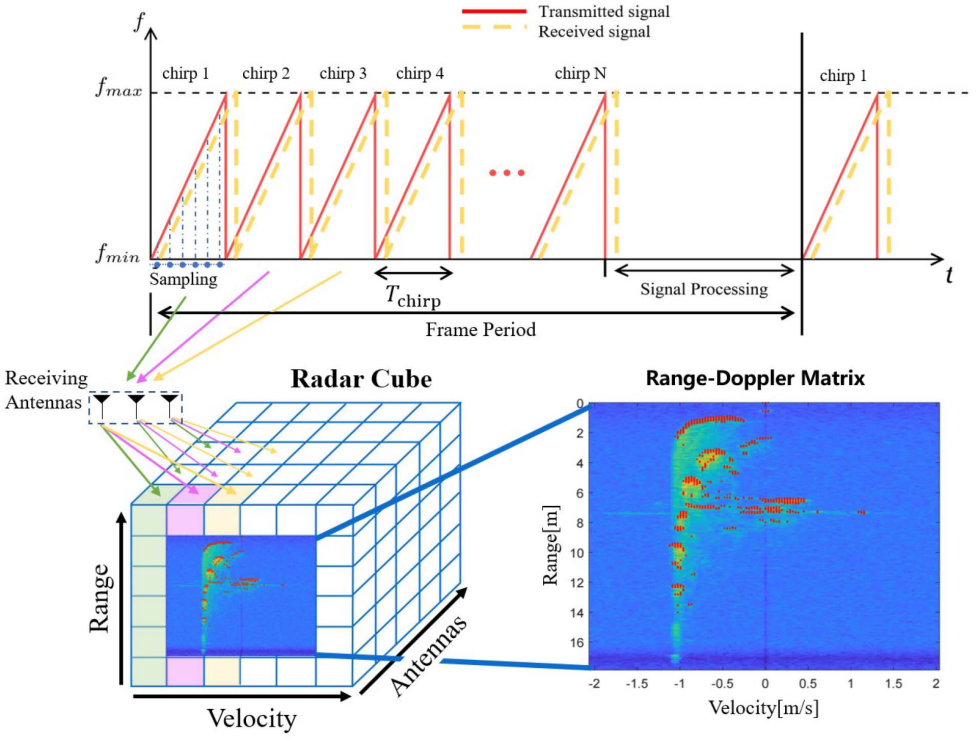
做完第一次一维傅里叶变换后,对n和p做一次二维傅里叶变换就可以得到速度和距离的对应矩阵,如下图
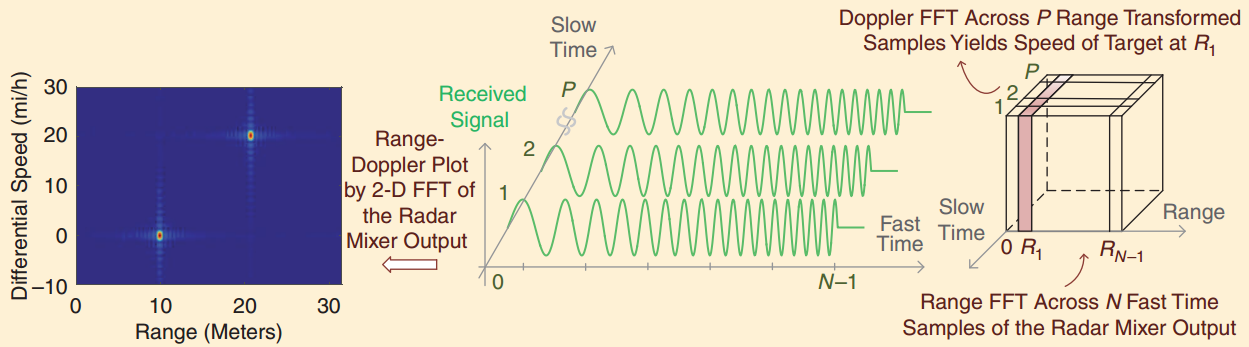
左图就是做完两次傅里叶变换的最终的结果,亮点就是信息点,横坐标代表位置,纵坐标代表对应的速度,中间图代表傅里叶处理前的信号,右图代表雷达数据立方体的两个维度:距离和速度
小总结一下,在快时间维度,即使一个移动的物体,我们也可以看作不动,那么对于快时间维度进行FFT就可以得到距离,而在这个基础上,我们在慢时间进行FFT的时候,物体可以看作移动了,这时我们提取2维fft中携带的相位(多普勒)信息就可以获得物体的速度了。
三.雷达数据立方体
3.1 通过雷达阵列的相互延时测量角度
至此,我们已经讲完了FMCW雷达数据立方体的两个维度,第三个维度就是角度,它一般无法由一个FMCW得到,主要是从雷达阵列得到的,如下图
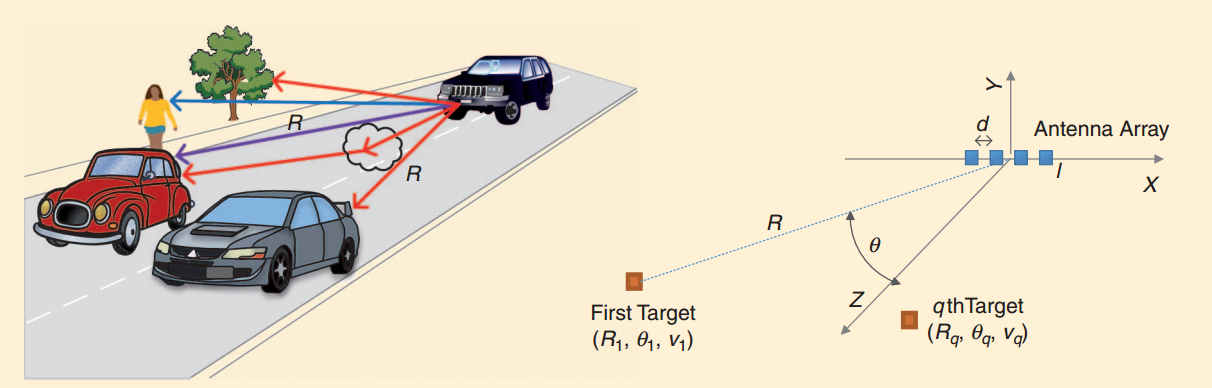

对于第q个目标,位于原点的发射器和位于坐标l的接收器之间的往返时间延迟由下式给出
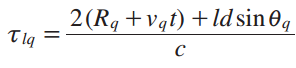
将该式和d(n, p)的表达式结合起来,就可以得到最终的信号表达式
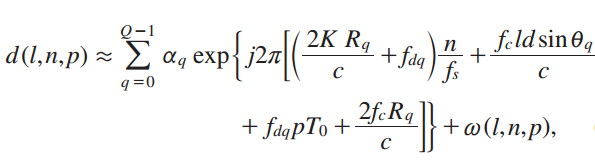
3.2 最终的雷达数据立方体结构
对该式做三维FFT就可以得到目标的二维位置(距离和角度)和速度估计信息(也可以理解为在前面两次FFT的基础上再做一次三维FFT)
如下图所示
这就是为什么,雷达的数据处理一般是一个立方体数据,三个维度:距离、速度、角度















 1163
1163











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









