






FMCW体制雷达
FMCW(Frequency Modulated Continuous Wave,调频连续波) Radar,顾名思义,这种雷达发射的波形为调频连续波。
信号模型
假设发射信号
s
1
(
t
)
\rm{s}_1(t)
s1(t)为:
s
1
(
t
)
=
exp
{
j
2
π
(
f
0
t
+
0.5
K
t
2
)
}
,
0
≤
t
≤
T
\rm{s}_1(t)=\exp \left\{ {j2\pi ({f_0}t + 0.5K{t^2})} \right\},0 \le t \le T
s1(t)=exp{j2π(f0t+0.5Kt2)},0≤t≤T
其中,
T
\rm{T}
T是一个chirp的持续时间,
K
\rm{K}
K是调频斜率。在一个周期T内,此信号的频率随着时间变化,
f
=
k
t
f = kt
f=kt。
f
0
{{f_0}}
f0表示载波,这个线性调频信号类似于一些调制,例如幅度调制角度调制等。
此信号也可以表示为:
s
1
(
t
)
=
exp
(
j
2
π
f
0
t
)
×
exp
(
j
2
π
×
0.5
K
t
2
)
{{\rm{s}}_1}(t) = \exp (j2\pi {f_0}t) \times \exp (j2\pi \times 0.5K{t^2})
s1(t)=exp(j2πf0t)×exp(j2π×0.5Kt2)
exp
(
j
2
π
f
0
t
)
\exp (j2\pi {f_0}t)
exp(j2πf0t)就是频率为
f
0
{f_0}
f0的信号,成为载波。那么第二项就是调制信号(为方便理解,这里也可称之为“被调制信号”,需要注意的是所有教材中均称之为“调制信号”)。
反射信号
发射信号经过目标反射后,得到回波 s 2 ( t ) = p s 1 ( t − τ ) {{\rm{s}}_2}(t) = p{{\rm{s}}_1}(t - \tau ) s2(t)=ps1(t−τ),这里假定 p = 1 p = 1 p=1。
所以,回波信号
s
2
(
t
)
{{\rm{s}}_2}(t)
s2(t)可以表示为:
s
2
(
t
)
=
p
s
1
(
t
−
τ
)
=
exp
{
j
2
π
(
f
0
(
t
−
τ
)
+
0.5
K
(
t
−
τ
)
2
)
}
{{\rm{s}}_2}(t) = p{{\rm{s}}_1}(t - \tau ) = \exp \left\{ {j2\pi ({f_0}(t - \tau ) + 0.5K{{(t - \tau )}^2})} \right\}
s2(t)=ps1(t−τ)=exp{j2π(f0(t−τ)+0.5K(t−τ)2)}
对于FMCW体制的雷达,一般将回波信号与参考信号进行混频处理,以降低器件的成本。
混频信号
那么混频信号
s
3
(
t
)
{{\rm{s}}_3}(t)
s3(t)可以表示为:
s
3
(
t
)
=
s
1
(
t
)
×
s
2
∗
(
t
)
=
exp
{
j
2
π
(
f
0
τ
+
K
τ
t
−
0.5
K
τ
2
)
}
{{\rm{s}}_3}(t) = {{\rm{s}}_1}(t) \times {\rm{s}}_2^*(t) = \exp \{ j2\pi ({f_0}\tau + K\tau t - 0.5K{\tau ^2})\}
s3(t)=s1(t)×s2∗(t)=exp{j2π(f0τ+Kτt−0.5Kτ2)}
上式第一项是载频相位延迟,第二项
K
τ
K\tau
Kτ保存着距离信息(
τ
=
2
R
c
\tau = \frac{{2R}}{c}
τ=c2R,
R
R
R为雷达与目标之间的距离,
c
c
c为光速),而第三项也就是RVP(residual video phase)项可以忽略掉。
提取距离信息
保留有距离信息的频率
K
τ
K\tau
Kτ(K的单位为Hz/s,
τ
\tau
τ的单位为s)称之为中频或者拍频,用符号
f
I
F
{f_{IF}}
fIF表示。
对混频信号
s
3
(
t
)
{{\rm{s}}_3}(t)
s3(t)进行傅里叶变换即可得到距离信息。
S
3
(
f
)
=
F
F
T
(
s
3
(
t
)
)
=
e
j
2
π
f
0
τ
×
sin
c
(
π
T
(
f
−
2
K
R
c
)
)
{{\rm{S}}_3}{\rm{(f) = FFT(}}{{\rm{s}}_3}(t){\rm{) = }}{{\rm{e}}^{j2\pi {f_0}\tau }} \times \sin c(\pi T(f - \frac{{2KR}}{c}))\
S3(f)=FFT(s3(t))=ej2πf0τ×sinc(πT(f−c2KR))
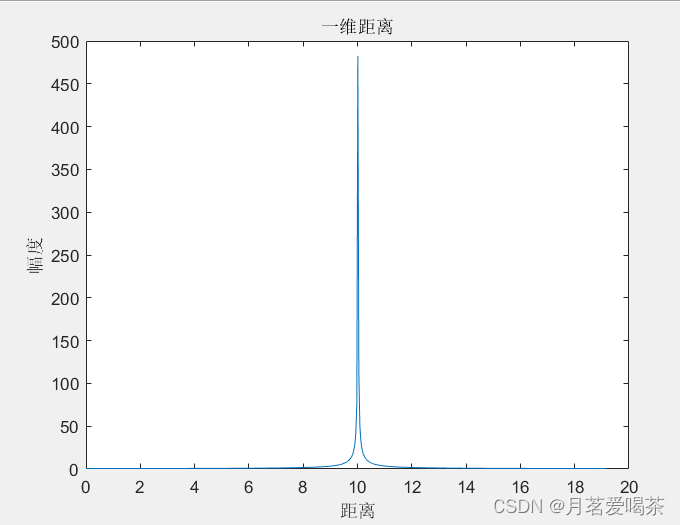
对上述函数进行傅里叶变换后是一个辛克函数,显然,在没有噪声的理想情况下,最终会在频率
f
=
K
τ
f=K\tau
f=Kτ处得到最大值,也就是距离对应的中频频率。
f
I
F
=
K
τ
=
K
2
R
c
{f_{IF}} = K\tau = K\frac{{2R}}{c}
fIF=Kτ=Kc2R
仿真结果
假设有个目标距离雷达距离为10米,并进行仿真结果如下:
Matlab代码
作者上传资源 FMCW毫米波雷达测距仿真代码(matlab)(免费)
















 2671
2671











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











