







速度可调:
在Prescan中环境构建完成以后,右键单击车辆,选择“Generate trajectory definition file(s) for...”,之后就会在simulink中生成可以改变速度的模块。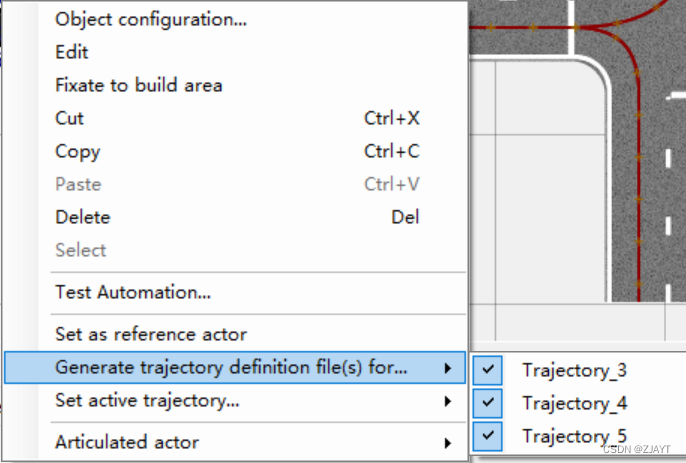
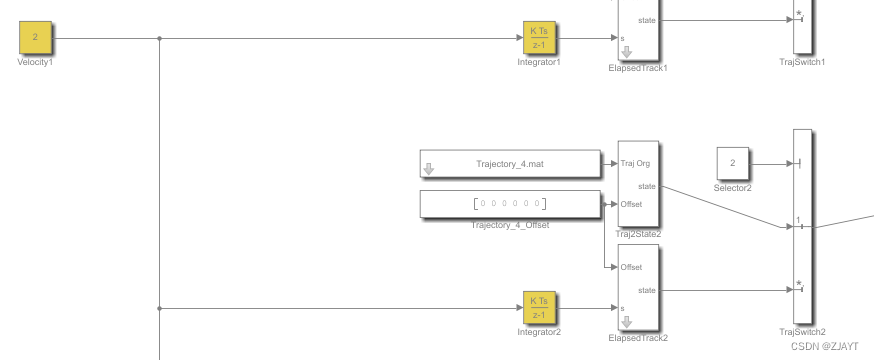
进入simulink之后,可以点击车辆'Trajectories'模块左下角的小箭头进入模型界面,将ElapsedTrack1模块的输入s替换为Velocity-Integrator1的输出,之后通过Velocity这个常数模块就可以对车速进行控制了。
路径选择:
1.首先需要在Prescan中构建3条路径,他们起点相同,终点不同。
2.右键点击车辆,进入车辆配置。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1343
1343

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









