







💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
模糊逻辑控制是由模糊集理论、模糊语言变量、模糊控制推理组成的一种智能逻辑控制方法。随着现代科学技术和工业体系的快速发展,外界环境的影响造成的不确定性因素增多,结构对象难以建立精确数学模型,即便结构对象能够建立数学模型,但系统分析的复杂性和控制性会使其难以实施。基于此,模糊控制理论应运而生,在近几十年也取得了许多的研究成果。如王志伟等人为了更合理、方便地控制土木工程结构地震动力反应,提出一种基于反向传播神经网络的结构振动模态模糊控制算法[1] ;杨超亚针对多层建筑模型需要建立在精确模型基础上的问题以及集中控制的缺点,引入模糊控制算法以及分散控制策略[2] ;王永提出了一种基于PID 控制下的振动模糊控制算法,达到了调节和优化结构减震效果的目的[3] ;
随着经济社会的飞速发展和人民生活水平的提升,公众对绿色生活的需求日益增长。一个低成本、可靠性强的植物种植系统可满足大部分人的种植需求,这种种植方式对家庭保湿、空气调节和环境绿化都起到了一定作用[1]。运用物联网和控制技术相结合的控制系统可以对植物生长环境进行准确调控[2],控制系统中的控制器接收来自传感器采集的数据,并根据智能控制算法向执行器发送指令,实现温室环境参数的控制,无需人工干预,从而极大减少人为差错。目前,关于智能控制算法研究,国内外已有很多可借鉴的成果。鲍义东等[3]提出一种温湿度智能控制系统软件设计方法,利用 PID 算法对温湿度目标函数进行求解,但该方法具有许多非线性行为以及所涉及的所有参数和因素。傅以盘等[4]研究出一种温室控制系统,该系统将模糊 PID 控制与温度模型相结合,得到的结果与真实值误差较低,该方法优于传统 PID 系统和传统模糊控制系统,但其制时精度低、抗干扰能力差。胡香玲等[5]提出一种神经网络 PID 的控制方法,将神经网络自学习算法与PID 算法相结合,控制效果明显,其具有学习能力强、模糊逻辑以及计算时间短、计算量小等优点,但神经网络结构复杂,可能产生不确定的结果。模糊逻辑方法具有简单的结构和快速的计算时间,模糊逻辑控制器是控制植物生长环境的较好选择[6]。而设计模糊逻辑控制器需要专家经
验生成控制规则和表达成员函数。
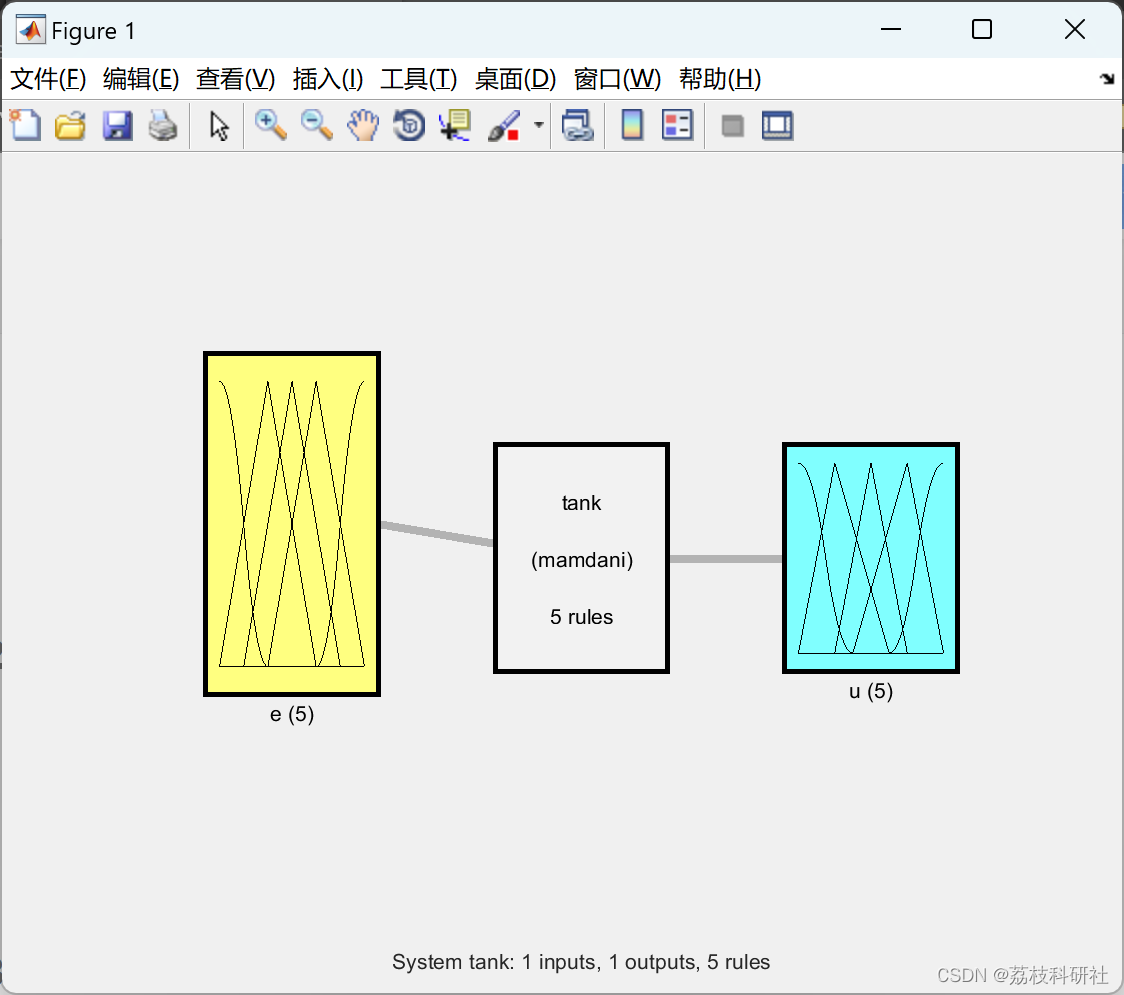
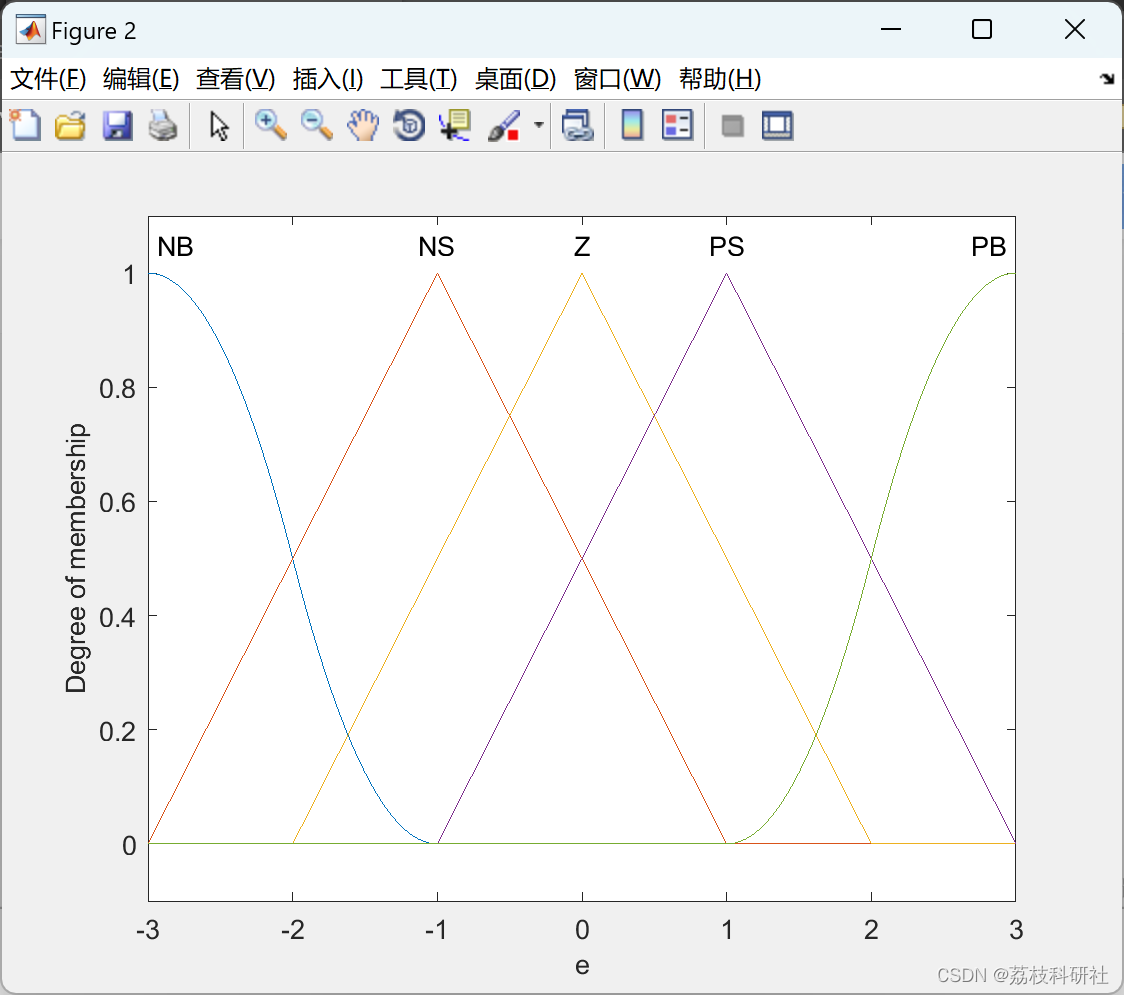
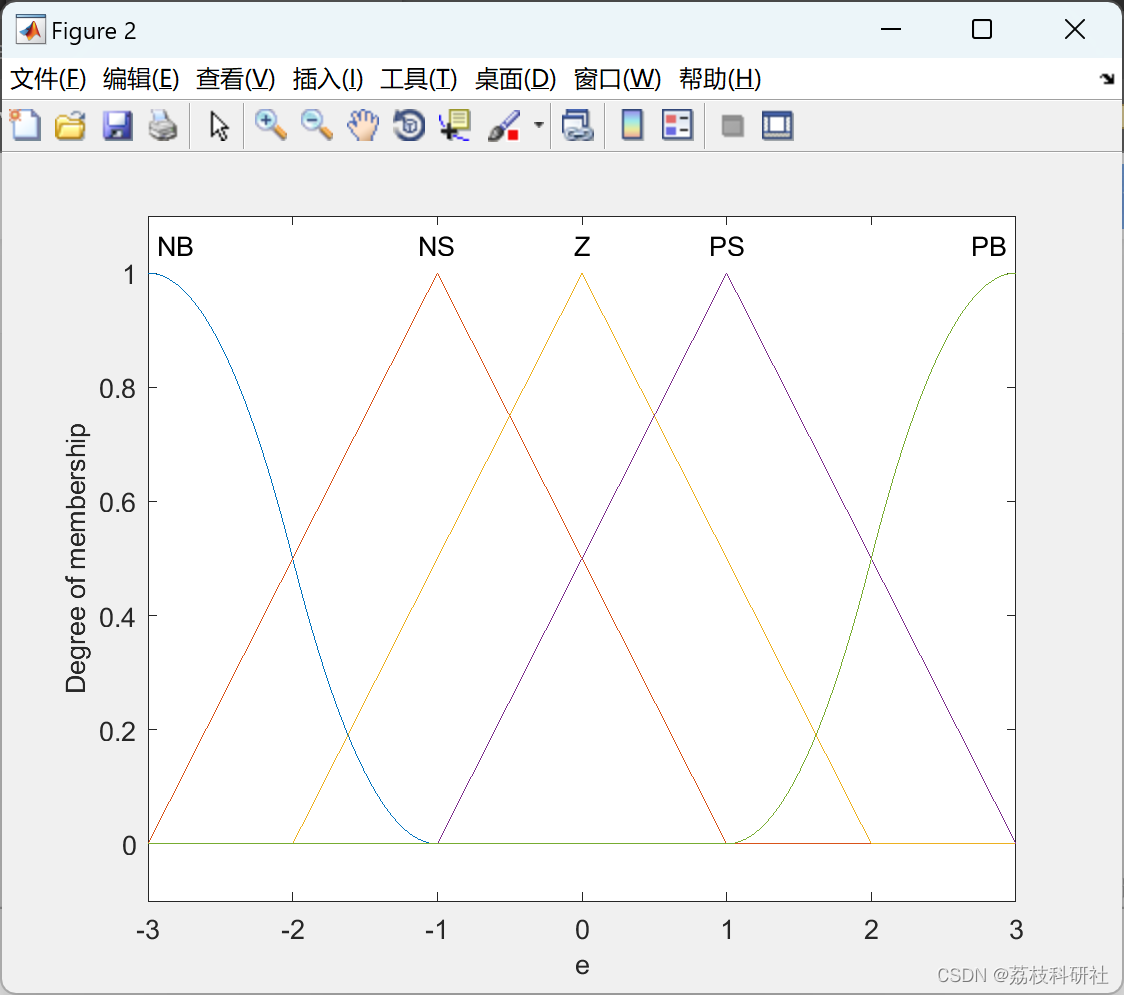
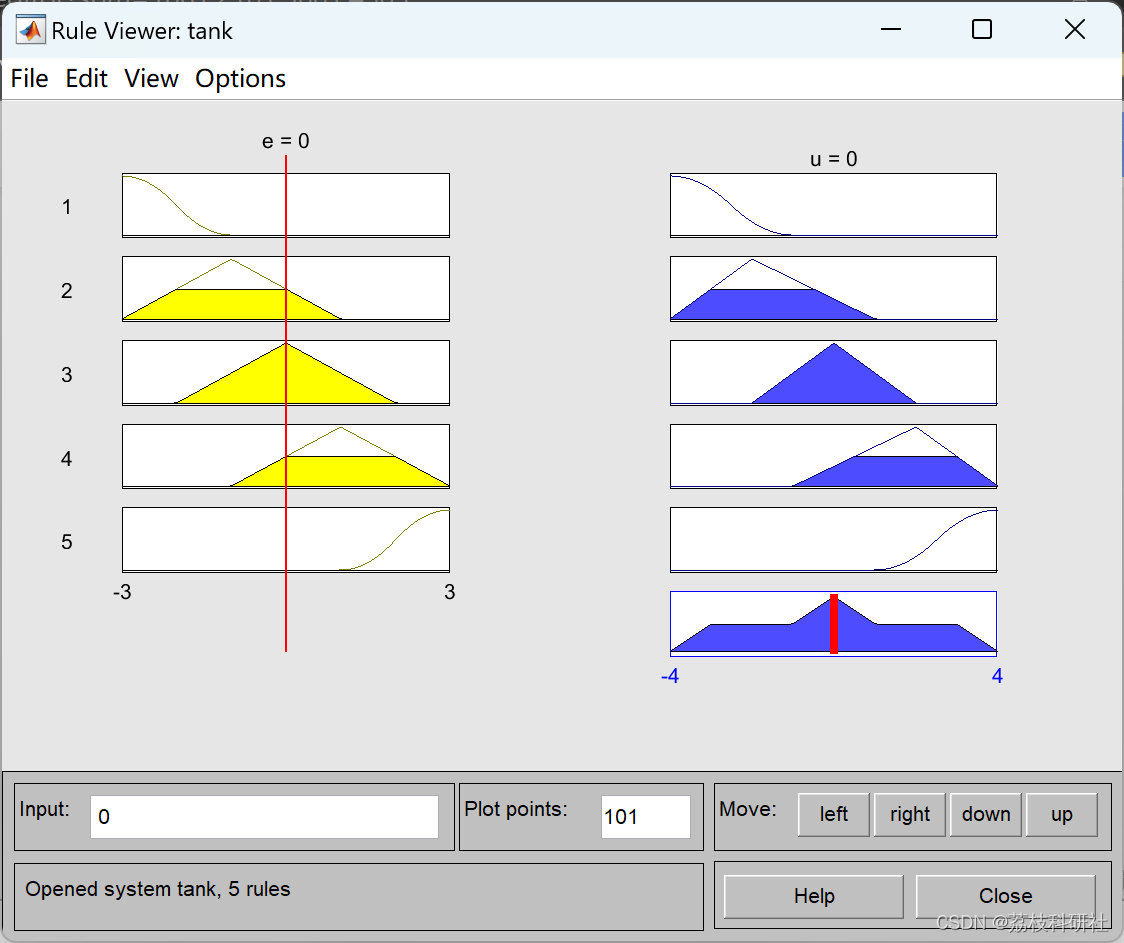
📚2 运行结果
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]徐苑露,张珣.基于模糊控制算法的微型植物生长系统[J].软件导刊,2023,22(05):97-102.
[2]魏芬,王素青,邓海琴,郝雯娟.基于模糊控制算法的一级倒立摆控制研究[J].计算机仿真,2023,40(03):320-325.
[3]黄琪,曾春平,马琨,刘彦君.基于模糊控制算法的抗震减震效果研究[J].现代电子技术,2023,46(08):149-153.DOI:10.16652/j.issn.1004-373x.2023.08.026.















 979
979











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









