






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
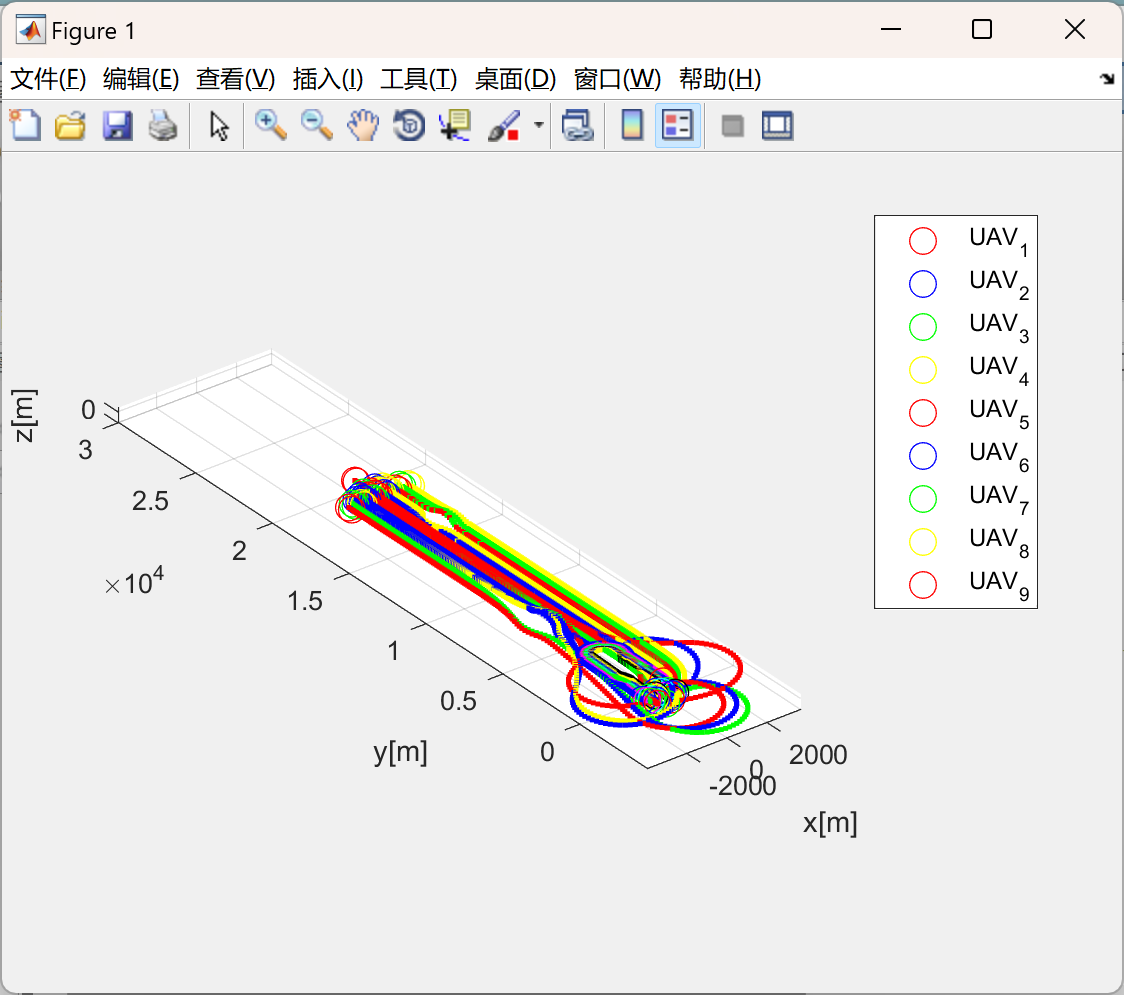
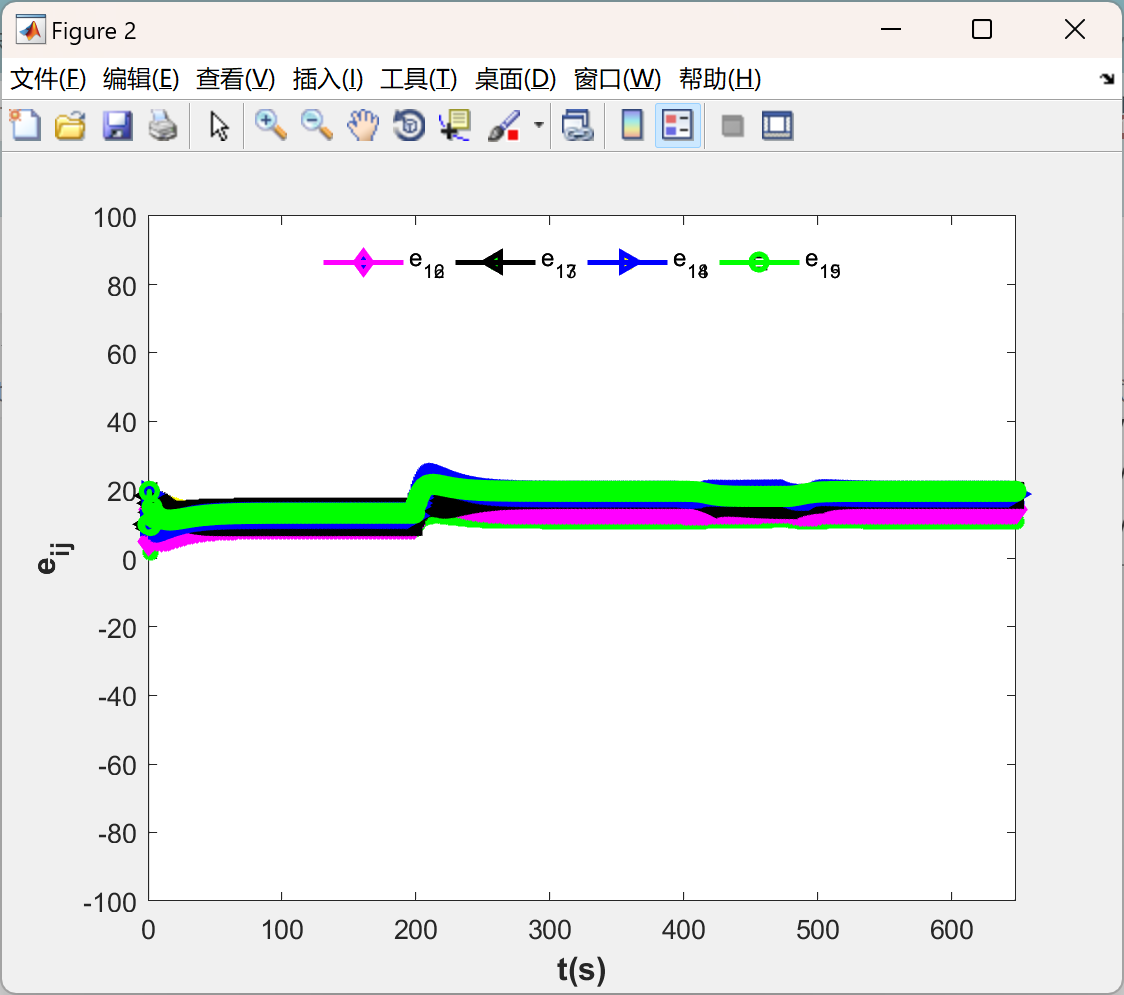
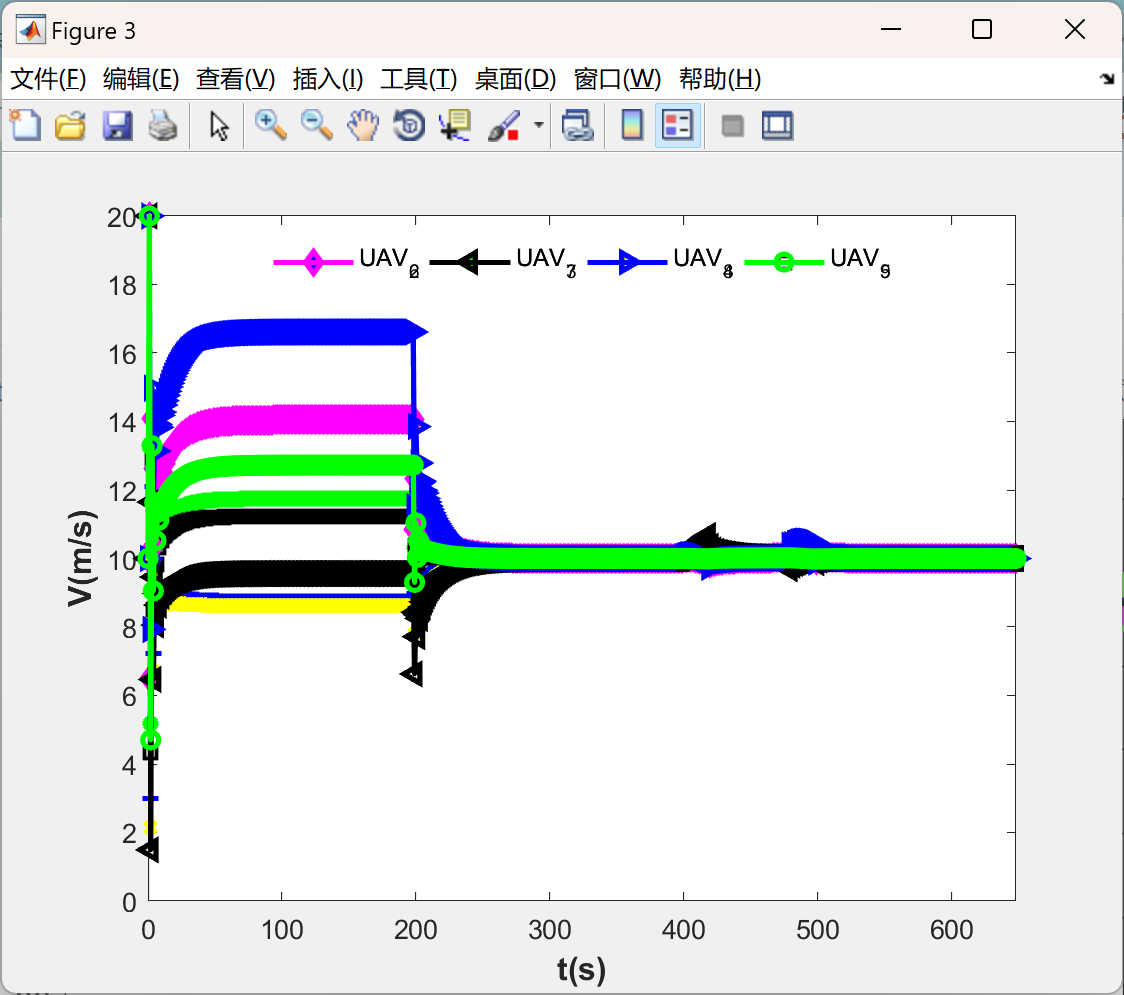
无人机群在三维环境中的碰撞和静态避障仿真旨在模拟多架无人机在复杂的三维空间中安全飞行的情景。这种仿真涉及到多个方面,包括无人机的动力学行为、环境地形的建模、碰撞检测与避免策略等。该仿真会对无人机的动力学模型进行建模,以准确描述无人机的运动特性,包括位置、速度和加速度等。然后,仿真环境将三维空间划分为网格或连续空间,并在其中标识出障碍物、目标位置以及无人机的起始位置。在仿真过程中,无人机将根据其动力学模型和控制算法进行运动规划,以达到预定的目标位置。同时,系统会实时监测无人机之间以及无人机与环境障碍物之间的距离,进行碰撞检测。通过这种仿真,可以评估不同的碰撞检测与避免策略在多无人机场景下的性能表现,并优化无人机飞行的安全性和效率。这种仿真在无人机系统设计、飞行控制算法验证以及无人机应用场景的规划与优化等方面具有重要意义。
📚2 运行结果
主函数部分代码:
clc
clear all;
T=[200 0 500;%Leader %初始位置坐标矩阵
-300 -200 300;%1
200 -500 200;%2
0 -600 100;%3
0 -800 100;%4
0 -450 80;%5
100 250 0;%6
50 200 0;%7
20 100 0;%8
40 50 0;%9
160 0 0;%10
80 -130 0;%11
100 -60 0;%12
200 -500 0;%13
100 -400 0;%14
0 -300 0;%15
-100 -200 0;%16
-200 -100 0;%17
-300 0 0;%18
-300 300 0;%19
-400 400 0];%20
plot3(T(1,1),T(1,2),T(1,3),'o','Markersize',10,'color','r');%画出初始位置
% text(T(1,1)-5,T(1,2)-5,T(1,3)-5,'UAV_1');%标注名称
hold on
plot3(T(2,1),T(2,2),T(2,3),'o','Markersize',10,'color','b');
hold on
plot3(T(3,1),T(3,2),T(3,3),'o','Markersize',10,'color','g');
hold on
plot3(T(4,1),T(4,2),T(4,3),'o','Markersize',10,'color','y');
hold on
plot3(T(5,1),T(5,2),T(5,3),'o','Markersize',10,'color','r');%画出初始位置
hold on
plot3(T(6,1),T(6,2),T(6,3),'o','Markersize',10,'color','b');
hold on
plot3(T(7,1),T(7,2),T(7,3),'o','Markersize',10,'color','g');
hold on
plot3(T(8,1),T(8,2),T(8,3),'o','Markersize',10,'color','y');
hold on
plot3(T(9,1),T(9,2),T(9,3),'o','Markersize',10,'color','r');%画出初始位置
hold on
plot3(T(10,1),T(10,2),T(10,3),'o','Markersize',10,'color','b');
hold on
plot3(T(11,1),T(11,2),T(11,3),'o','Markersize',10,'color','g');
hold on
plot3(T(12,1),T(12,2),T(12,3),'o','Markersize',10,'color','y');
hold on
plot3(T(13,1),T(13,2),T(13,3),'o','Markersize',10,'color','r');%画出初始位置
hold on
plot3(T(14,1),T(14,2),T(14,3),'o','Markersize',10,'color','b');
hold on
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]董昌. 科技撑腰,增产增收底气足[N]. 河北日报,2024-05-09(011).
[2]张宇宸,段海滨,魏晨.基于深度强化学习的无人机集群数字孪生编队避障[J/OL].工程科学学报:1-12[2024-05-11].http://kns.cnki.net/kcms/detail/10.1297.TF.20240412.1109.003.html.














 1937
1937











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









