







 本文详细介绍了KUKAiiwa机器人的FRI通信环境配置过程,包括StationSetup.cat文件的配置、Windows和Ubuntu系统的客户端配置,以及如何解决常见问题。
本文详细介绍了KUKAiiwa机器人的FRI通信环境配置过程,包括StationSetup.cat文件的配置、Windows和Ubuntu系统的客户端配置,以及如何解决常见问题。
KUKA iiwa 机器人实时控制 – 2. 基本环境配置
本文将对KUKA iiwa FRI 通信的基本环境配置部分进行介绍。
本教程其他文章请通过下面链接查看
KUKA iiwa 机器人实时控制 – 1. FRI通信硬件连接
KUKA iiwa 机器人实时控制 – 2. 基本环境配置
KUKA iiwa 机器人实时控制 – 3. 控制柜FRI JAVA程序
KUKA iiwa 机器人实时控制 – 4. 客户端FRI C++程序
测试平台
KUKA 机器人:KUKA iiwa 14
KUKA iiwa编程软件: Sunrise Workbench 1.7
KUKA iiwa 通信包: KUKA Sunrise.Connectivity FRI 1.7
操作系统:
- Windows 10 运行Sunrise Workbench软件
- Ubuntu 20.04 运行 FRI 客户端程序
本文不对Sunrise Workbench工程创建进行详细介绍,如需了解,请参考Sunrise Workbench工程创建。
1 StationSetup.cat配置与安装
该部分内容在Windows系统中进行。确保电脑已安装供应商提供的Sunrise Workbench软件,建立新的JAVA工程,用于FRI通信测试,工程中需要包含FRI通信所需的jar库文件。
新工程创建好之后,首先要对StationSetup.cat文件进行配置,该文件是对机器人控制柜硬件底层的配置,如网口IP配置、FRI通信包安装等,均通过该文件进行配置。
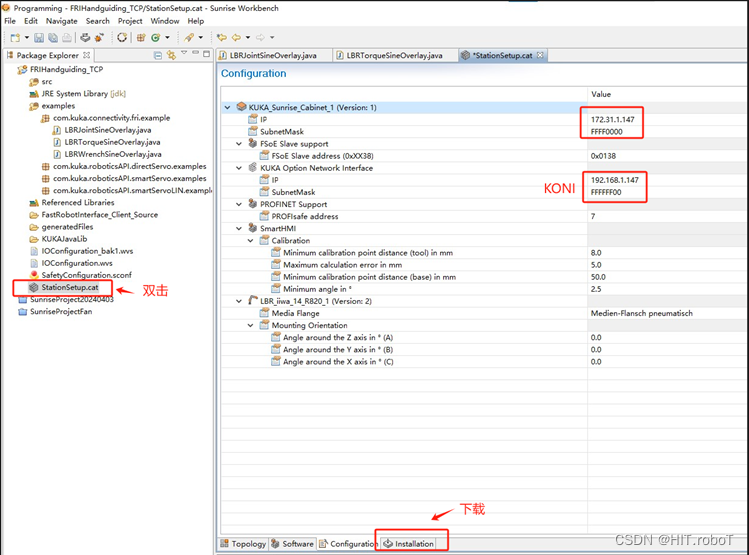
打开StationSetup.cat文件,在Topology 选项中,导入指定型号iiwa机器人,在Software选项中勾选 FRI (Fast Robot Interface)库,然后在Configuration选项中,配置机器人控制柜两个网口的地址,如下图所示。
注意:Configuration选项中的Media Flange 是要根据自己iiwa机器人末端法兰类型进行设置的,这里如果和机器人不匹配将无法正常执行程序。
配置完成后,确保KUKA机器人已正常启动,在Installation选项卡中点击 下载按钮,开始下载工程。这里如果提示下载IP地址错误,无法下载请检查网线连接,参考 KUKA iiwa 机器人实时控制 – 1. FRI通信硬件连接。
若无异常,需要等待下载好配置后,系统自动重启。重启后如果 iiwa 的 smartPAD 中Satety选项有红色错误提示,请检查下面内容:
(1)
Satety选项中激活按钮是否已执行,若未激活请点击激活按钮,输入密码激活;
(2) 若已完成激活,仍然有红色错误提示,请检查JAVA工程文件中的SafetyConfigration.sconf是否正确配置。
2 FRI客户端平台配置
在运行Ubuntu系统的电脑中,将与KONI连接的网口对应的网卡IP修改为192.168.1.13,子网掩码设置为 255.255.255.0,这里IP地址可以修改为同一网段的其他值。
将KUKA Smartpad 调节为AUT 模式。在Ubuntu系统电脑中执行下面命令
ping 192.168.1.147
若反馈正常,则进行下一步。若无法ping通,则执行命令
arp -a
观察返回结果,如果返回的IP列表中没有192.168.1.13,则证明KUKA iiwa控制柜的KONI网口未被正确配置,按下面步骤处理( 参考链接 ):
(1)关机状态下,拔掉Smartpad,控制柜连接显示器(DVI-I的接头),键盘和鼠标;
(2)Win + D进入桌面,右键单击系统托盘中的绿色图标(右下角时间显示旁边),然后单击Stop KRC。
(3)打开命令窗口 执行命令
C:\KUKA\Hardware\Manager\KUKAHardwareManager.exe -assign OptionNIC -os RTOS
(4)关闭控制柜,连接Smartpad,启动控制柜。
完成上述配置后,需要再次执行第 1 步的操作,将StationSetup.cat配置下载至控制柜。按照上述内容再次测试与KONI网口的通信是否正常。
完成上述步骤后,FRI通信的基本环境配置完成,下面对KUKA iiwa控制柜中的JAVA程序进行介绍。
KUKA iiwa 机器人实时控制 – 3. 控制柜FRI JAVA程序

















 1569
1569

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









