







一. 工训机器人 V1
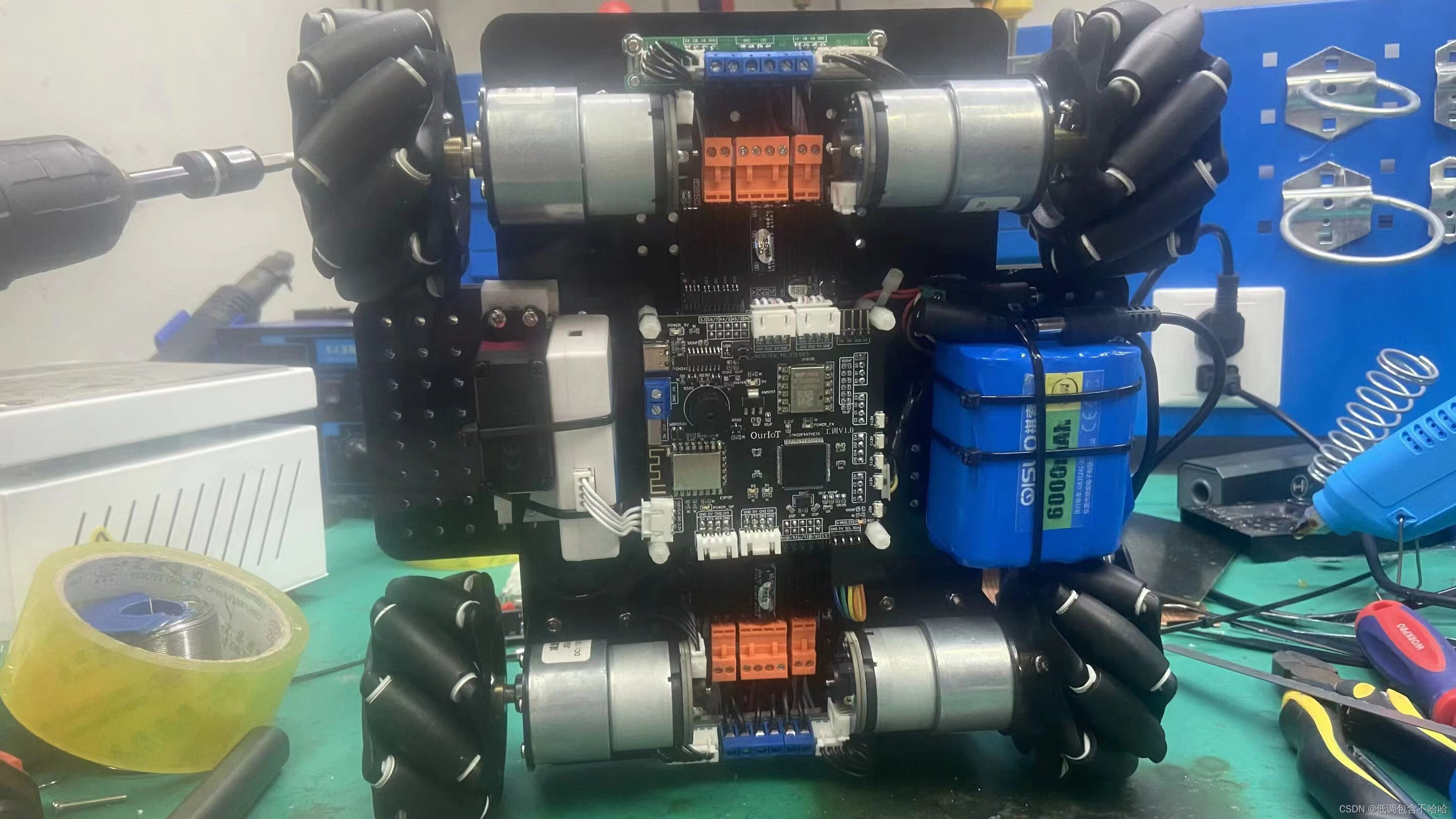
1. 实物
将自制的F4开发板放置车底板下方,节省上方空间,且能保证布线方便整齐。
2. SW仿真
使用SolidWorks进行仿真,且绘制3D打印件。
工训仿真
3.3D打印爪测试
机械爪测试
二. 工训机器人 V2
1. 实物
工训机器人V2不同于V1,采用了全封闭结构,我们不能看到内部结构也仿真了外部环境对内部电路造成干扰。

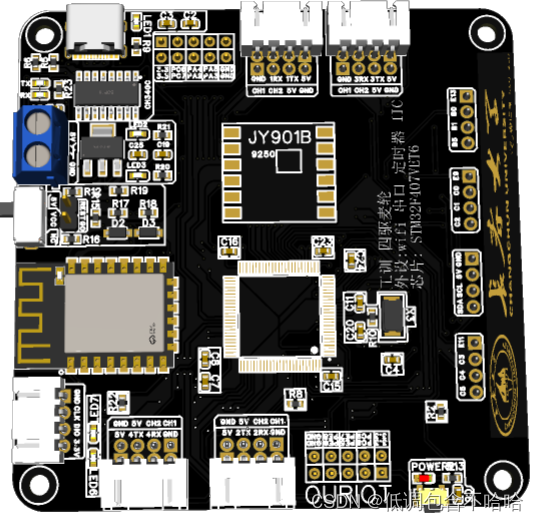
2. PCB的3D图
提前在立创EDA上绘制STM32F407VET6的系统板,用此系统板控制工训车完成任务。
3. 部分工训车运行视频
运行
4. 物料识别
树莓派使用Opencv库识别物料的演示视频。
物料识别



















 247
247

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











