






 本文介绍了如何在Ubuntu系统上安装ROS1.0,包括添加ROS源、安装步骤、ROS基本命令如小海龟示例和命令行工具的使用。重点讲解了如何用C++和Python控制小海龟画圆,以及如何实现远程小海龟实验。
本文介绍了如何在Ubuntu系统上安装ROS1.0,包括添加ROS源、安装步骤、ROS基本命令如小海龟示例和命令行工具的使用。重点讲解了如何用C++和Python控制小海龟画圆,以及如何实现远程小海龟实验。
ROS入门
任务简介
1.在Ubuntu16/18/20系统中,安装对应版本的ROS1.0软件
2.熟悉ROS基本命令,并运行小海龟demo例子,通过键盘控制小海龟运动。同时用话题查看器查看两个node之间的消息传递;
3.用C++或python写一个程序,控制小海龟走一个标准的圆形;成功后,再采用两台电脑,重新进行远程小海龟实验。
一、ROS简介
ROS(Robot Operating System,机器人操作系统)
ROS 是一个适用于机器人的开源的元操作系统,提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。相比于普通的OS,有着可用于异构硬件的特性。它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。在某些方面 ROS 相当于一种 “机器人框架(Robot frameworks)。此外,它还以库的形式提供了机器人应用程序所需的多数不同类型的硬件之间的数据传输/接收、调度和错误处理等功能。这个概念也被称为中间件(Middleware)或软件框架(Software framework)
了解更多的ros基本知识可以参考以下链接
链接: link
二、ROS安装
1、添加ros源
打开终端,输入以下指令
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
2、添加密匙
打开终端,输入以下指令
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
我这里不是第一次添加了,所以结果和初次添加有些许不同

3、更新软件源
sudo apt update
成功后的结果如下:
4、ROS安装
sudo apt install ros-noetic-desktop-full
指令输入后的界面
5、初始化rosdep
sudo rosdep init
推荐以下链接,踩坑较多
链接: link
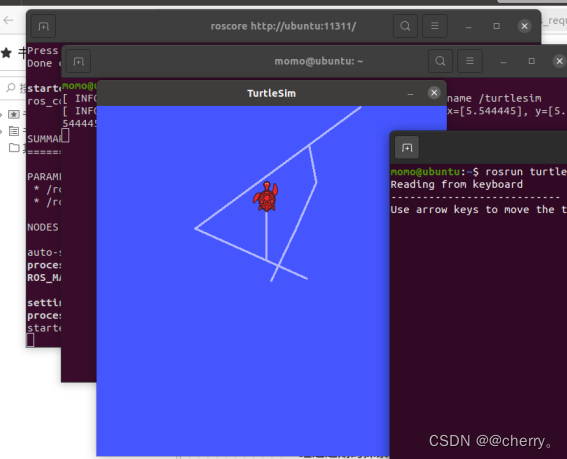
三、ROS第一个例程——小海龟
开启小海龟仿真的步骤:
①启动ROS Master
roscore

按ctrl+alt+t打开一个新的终端,输入以下命令
②启动小海龟仿真器
rosrun turtlesim turtlesim_node
按ctrl+alt+t打开一个新的终端,输入以下命令
③启动海龟控制节点
rosrun turtlesim turtle_teleop_key
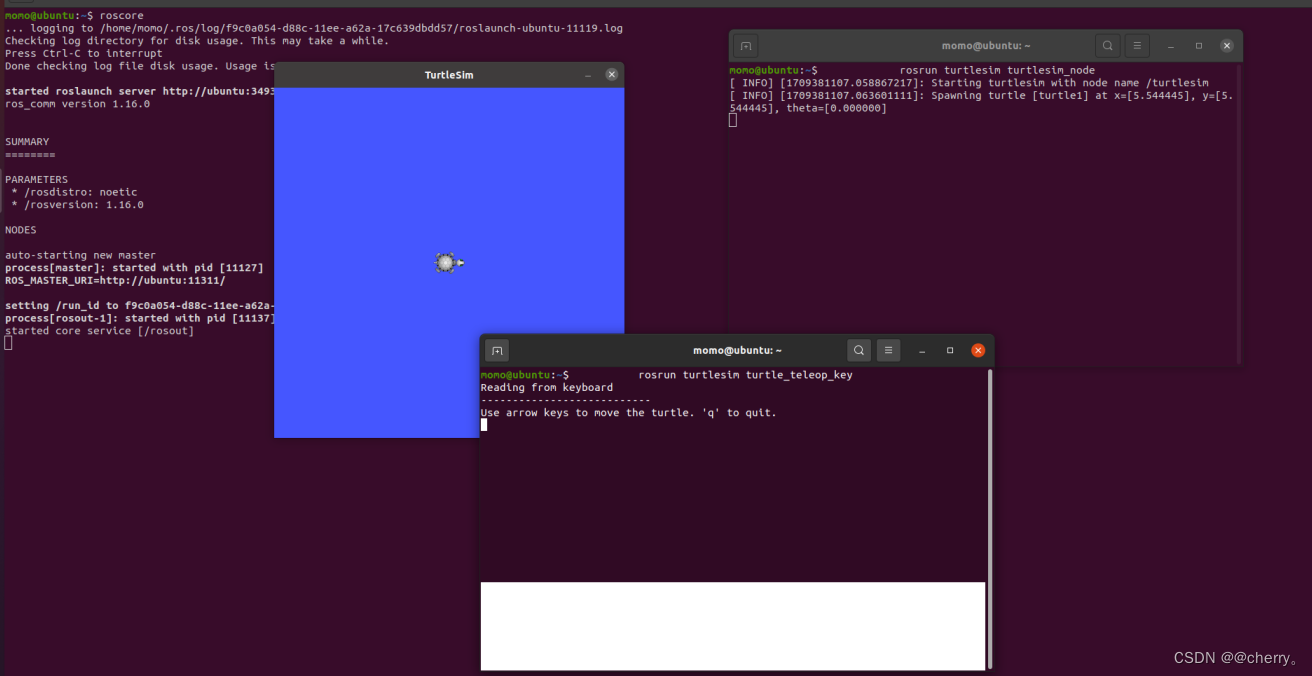
效果如下
四、ROS命令行工具使用
1、节点管理器
在运行ros必须首先运行的命令,通过如下命令启动
roscore
可以参考小乌龟的例子
2、运行节点
这里我们要在运行 roscore 命令的前提下,在第二个终端中运行 rosrun
注意:每次都要使用一个新命令行窗口来运行一个新的节点(ctrl+alt+t打开一个新的终端)
rosrun 是用来运行某个功能包中某个节点的指令
# rosrun 包名 节点名
rosrun turtlesim turtlesim_node
这里和上面的例子一样就不在赘述
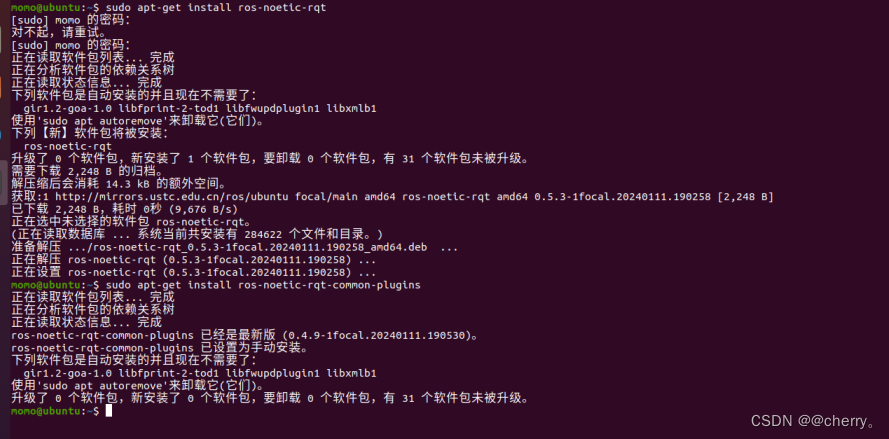
3、可视化工具
ros 中有很多基于 qt 开发的可视化工具,这里我们可以很方便的看到一些信息
首先我们要安装 rqt 相关内容,这里我们使用的是 Noetic 版本的 ros ,安装命令如下:
sudo apt-get install ros-noetic-rqt
sudo apt-get install ros-noetic-rqt-common-plugins
4、常用工具
rosnode
直接输入 rosnode 会得到使用提示
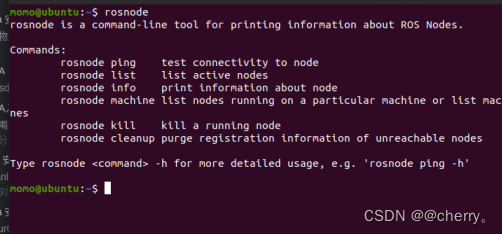
rosnode list
把所有系统中的节点都列出来,但是与 rqt_graph 有一定区别,多出一个 rosout ,一个 ros 默认的话题,用于采集所有节点的一些信息,然后放在界面上进行显示
五、控制小海龟画圆
1、ROS工作空间的建立
1.打开Home目录,在空白处右击,点击新建文件夹(New Folder)建立一个文件夹,命名为catkin_ws
2.在文件夹 catkin_ws 下创建一个文件夹 src
3.在src目录下右键在终端中打开(Open in Terminal),输入catkin_init_workspace。在src文件夹中出现CMakeLists.txt文件
4.在catkin_ws文件夹下打开终端(Open in Terminal),输入catkin_make。在catkin_ws文件夹里生成build和devel两个文件夹。
5、设置环境变量是为了让系统知道功能包的位置在哪,以便能找到。确保安装脚本正确地覆盖了工作空间,ROS_PACKAGE_PATH环境变量包含在目录中。
在catkin_ws路径下终端输入source devel/setup.bash,使系统知道功能包放置在catkin_ws这个工作空间下。

6、ROS机器人画圆程序的编写
#include "ros/ros.h"
#include<geometry_msgs/Twist.h> //运动速度结构体类型 geometry_msgs::Twist的定义文件
int main(int argc, char *argv[])
{
ros::init(argc, argv, "vel_ctrl"); //对该节点进行初始化操作
ros::NodeHandle n; //申明一个NodeHandle对象n,并用n生成一个广播对象vel_pub
ros::Publisher vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
//vel_pub会在主题"/cmd_vel"(机器人速度控制主题)里广播geometry_msgs::Twist类型的数据
ROS_INFO("draw_circle start...");//输出显示信息
while(ros::ok())
{
geometry_msgs::Twist vel_cmd; //声明一个geometry_msgs::Twist 类型的对象vel_cmd,并将速度的值赋值到这个对象里面
vel_cmd.linear.x = 2.0;//前后(+-) m/s
vel_cmd.linear.y = 0.0; //左右(+-) m/s
vel_cmd.linear.z = 0.0;
vel_cmd.angular.x = 0;
vel_cmd.angular.y = 0;
vel_cmd.angular.z = 1.8; //机器人的自转速度,+左转,-右转,单位是rad/s
vel_pub.publish(vel_cmd); //赋值完毕后,发送到主题"/cmd_vel"。机器人的核心节点会从这个主题接受发送过去的速度值,并转发到硬件体上去执行
ros::spinOnce();//调用此函数给其他回调函数得以执行(比例程未使用回调函数)
}
return 0;
}
7、在CMakeLists.txt文件中找到##Declare a C++ executable,在这一行的前面添加如下内容:
add_executable(draw_circle src/draw_circle.cpp)
target_link_libraries(draw_circle ${catkin_LIBRARIES})
8、保存并退出CMakeLists.txt文件。然后在terminal中继续输入如下命令进行编译:
$ cd ~/catkin_ws/
$ catkin_make
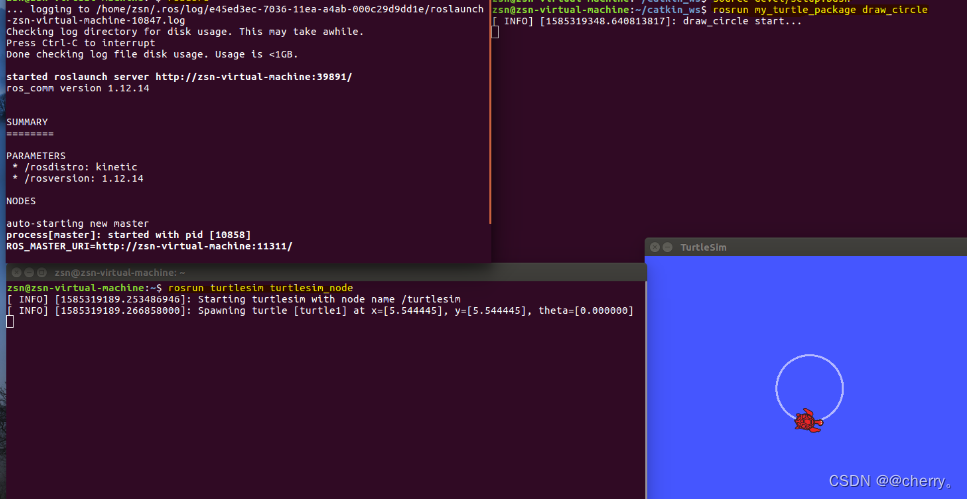
9、启动ROS机器人
10、打开第一个终端(terminal),启动ros
输入 roscore
11.打开第二个终端(terminal),启动rosnode
输入 rosrun turtlesim turtlesim_node
12.打开第三个终端(terminal),启动my_turtle_package节点
cd ~/catkin_ws/ source
devel/setup.bash
rosrun my_turtle_package draw_circle
小乌龟开始画圆了。按下Ctr+C退出节点,小乌龟停止。

















 758
758

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









