







ROS2——话题、服务、动作编程
在做完小海龟的实验之后,我们继续熟悉ROS基础中的话题,服务和动作编程
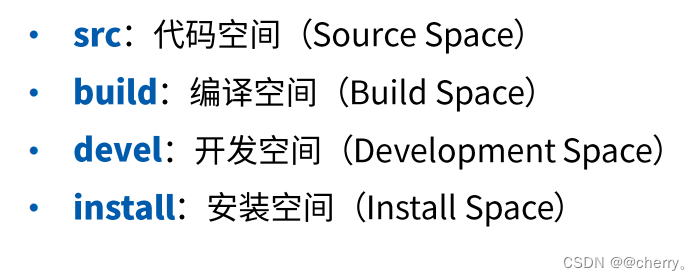
一、工作空间
1、什么是工作空间
工作空间思存放工程开发相关文件的文件夹
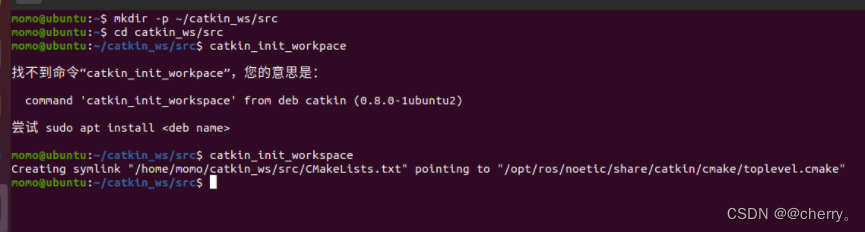
2、工作空间的创建
1、创建名为catkin_ws的工作区
mkdir -p ~/catkin_ws/src
2、进入该工作空间的src文件夹
cd ~/catkin_ws/src
3、初始化
catkin_init_workspace
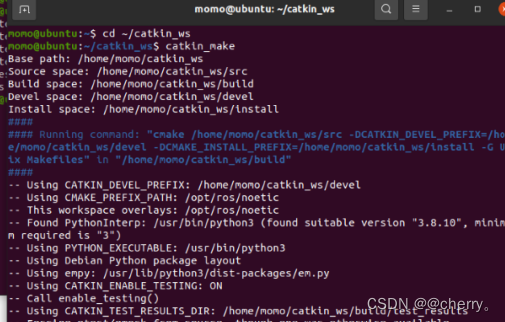
3、编译工作空间
cd ~/catkin_ws/
catkin_make
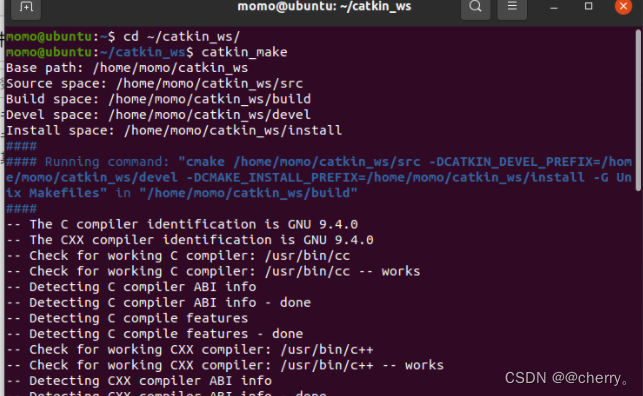
这时候,会在当前文件夹下生成devel,build这两个子文件夹,在devel文件夹下能看到几个setup.*sh文件
当前文件夹下生成devel,build这两个子文件夹如下图
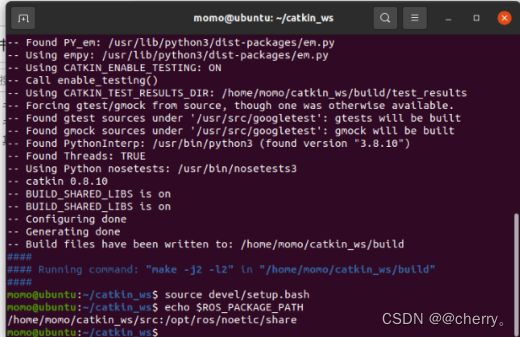
4、设置并检查环境变量
设置环境变量
source devel/setup.bash
检查环境变量
echo $ROS_PACKAGE_PATH
二、创建一个ROS工程包
在一个工作区内,可能会包含多个ROS工程包。而最基本ROS工程包中会包括CmakeLists.txt和Package.xml这两个文件,其中Package.xml中主要包含本项目信息和各种依赖(depends),而CmakeLists.txt中包含了如何编译和安装代码的信息。
1、切换到工作区
cd ~/catkin_ws/src
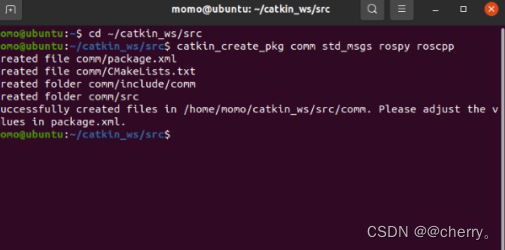
2、创建一个叫comm(通信)包
catkin_create_pkg comm std_msgs rospy roscpp
如下
3、编译工程包
如下即可:
4、创建通信的发、收节点
节点(node)是连接到ROS网络中可执行的基本单元。我们在这创建一个发布者—“talker”节点,这个节点持续对外发布消息。
1、切换到我们的comm
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









