







Microseconds 1us微秒
Ticks 0.25us
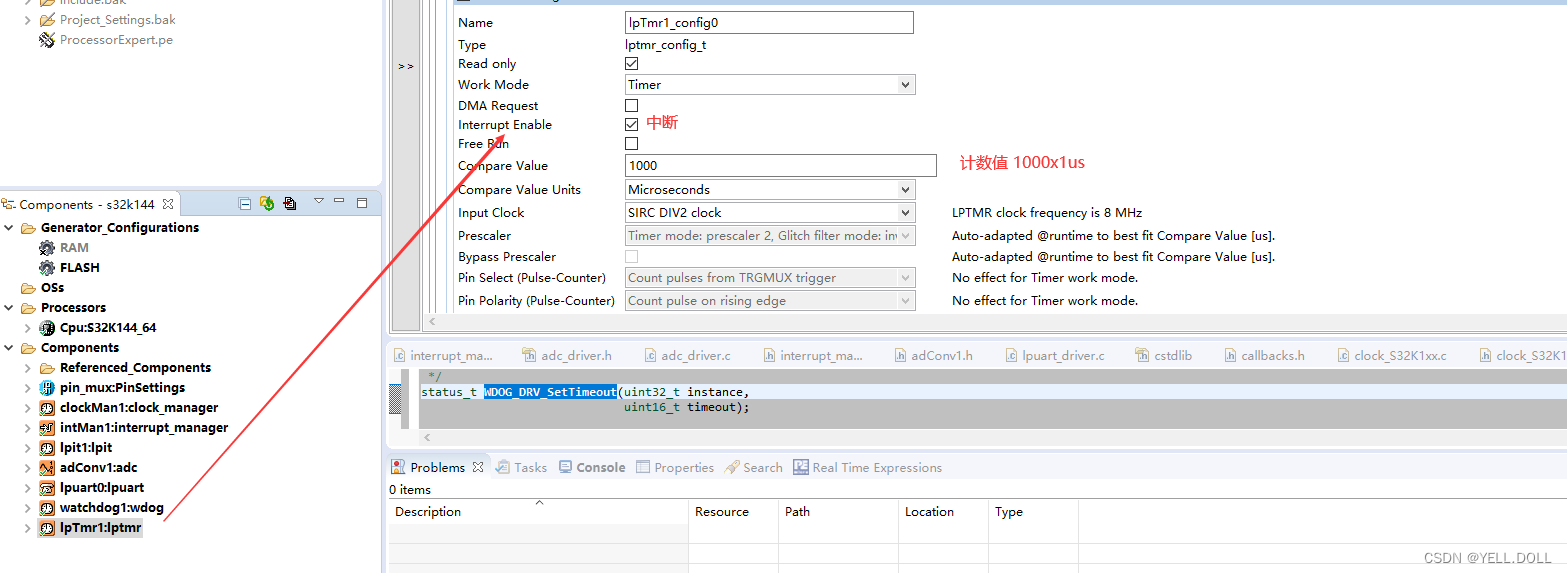
- lptmr0定时器初始化配置
- 设置定时器中断回调函数
void lptmr1_init(){
//初始化 lptmr
LPTMR_DRV_Init(INST_LPTMR1, &lpTmr1_config0,1);
//系统绑定lptmr中断函数
INT_SYS_InstallHandler(LPTMR0_IRQn,&LPTMR0_IRQn_Handler,NULL);
//使能系统
INT_SYS_EnableIRQ(LPTMR0_IRQn);
//设置中断优先级
INT_SYS_SetPriority(LPTMR0_IRQn,2);
//lptmr开始计数
LPTMR_DRV_StartCounter(INST_LPTMR1);
}
//中断函数
void LPTMR0_IRQn_Handler(void){
LPTMR_DRV_ClearCompareFlag(INST_LPTMR1);
}
















 528
528











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











