







 本文介绍了如何在Simulink环境中使用FuzzyLogicDesigner设计模糊PID控制器,包括设置输入/输出、模糊规则和导出控制器。同时,详细解释了在仿真过程中遇到的数值求解器问题及其可能的解决方案,以及对模糊PID控制效果的讨论。
本文介绍了如何在Simulink环境中使用FuzzyLogicDesigner设计模糊PID控制器,包括设置输入/输出、模糊规则和导出控制器。同时,详细解释了在仿真过程中遇到的数值求解器问题及其可能的解决方案,以及对模糊PID控制效果的讨论。
基于Simulink的模糊PID控制
Simulink 是一个模块图环境,用于多域仿真以及基于模型的设计。它支持系统级设计、仿真、自动代码生成以及嵌入式系统的连续测试和验证。Simulink 提供图形编辑器、可自定义的模块库以及求解器,能够进行动态系统建模和仿真。
模糊控制论 是以模糊集合,模糊语言变量及模糊逻辑推理为基础的计算机智能控制。该机制的输入是透过模糊化将原本0和1的资料变成0到1之间的数值,相对于原本的非零即一的二分法较接近人类的思维。在推论的过程中资料为模糊的,但透过解模糊化的步骤,可使得输出为精确值。模糊控制常用于智能运算、建构专家系统、和类神经网络共同应用。
最近在课程中用到了PID与模糊控制,为防止遗忘,写下此博客。
题目描述

在本次实践中我们主要应用了 Fuzzy Logic Designer 工具箱去设计模糊控制的输入/输出隶属度函数以及模糊规则,再使用 Simulink 进行仿真。
进行 模糊+PID(FPID) 控制的系统结构图如下所示:
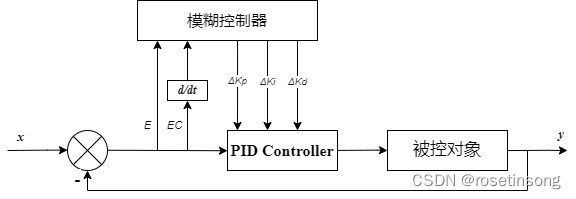
系统框图很清晰的表示了信号流的流向。我们将误差信号以及误差的微分信号作为模糊控制器的输入,控制器的输出为 Δ K p \Delta K_p ΔKp
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5026
5026

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









