







 本文介绍了如何基于开源代码改造一个简单的智能车,包括硬件需求(如超声波模块、舵机、电机驱动等)、小车搭建步骤(电机控制、蓝牙连接、避障循迹功能实现)以及项目源码分享。作者还提供了电路设计和调试建议。
本文介绍了如何基于开源代码改造一个简单的智能车,包括硬件需求(如超声波模块、舵机、电机驱动等)、小车搭建步骤(电机控制、蓝牙连接、避障循迹功能实现)以及项目源码分享。作者还提供了电路设计和调试建议。
【智能车入门】(实现最简单的蓝牙遥控、超声波避障、红外循迹),本篇博客源码是b站up主(枫林晚Vx)开源的,在他的基础上进行修改
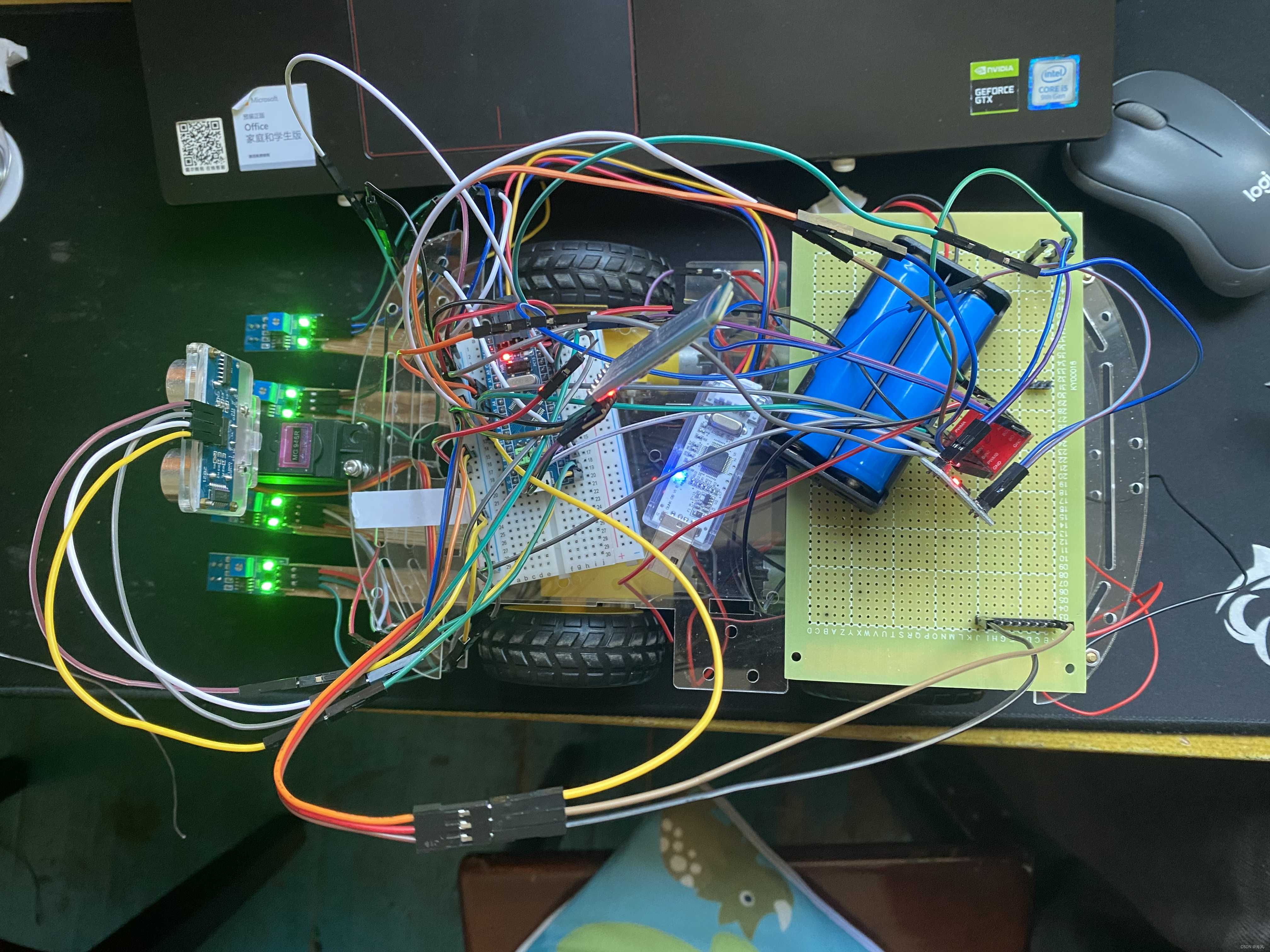
实物图及最终效果

最终蓝牙app的控制界面是这样的:
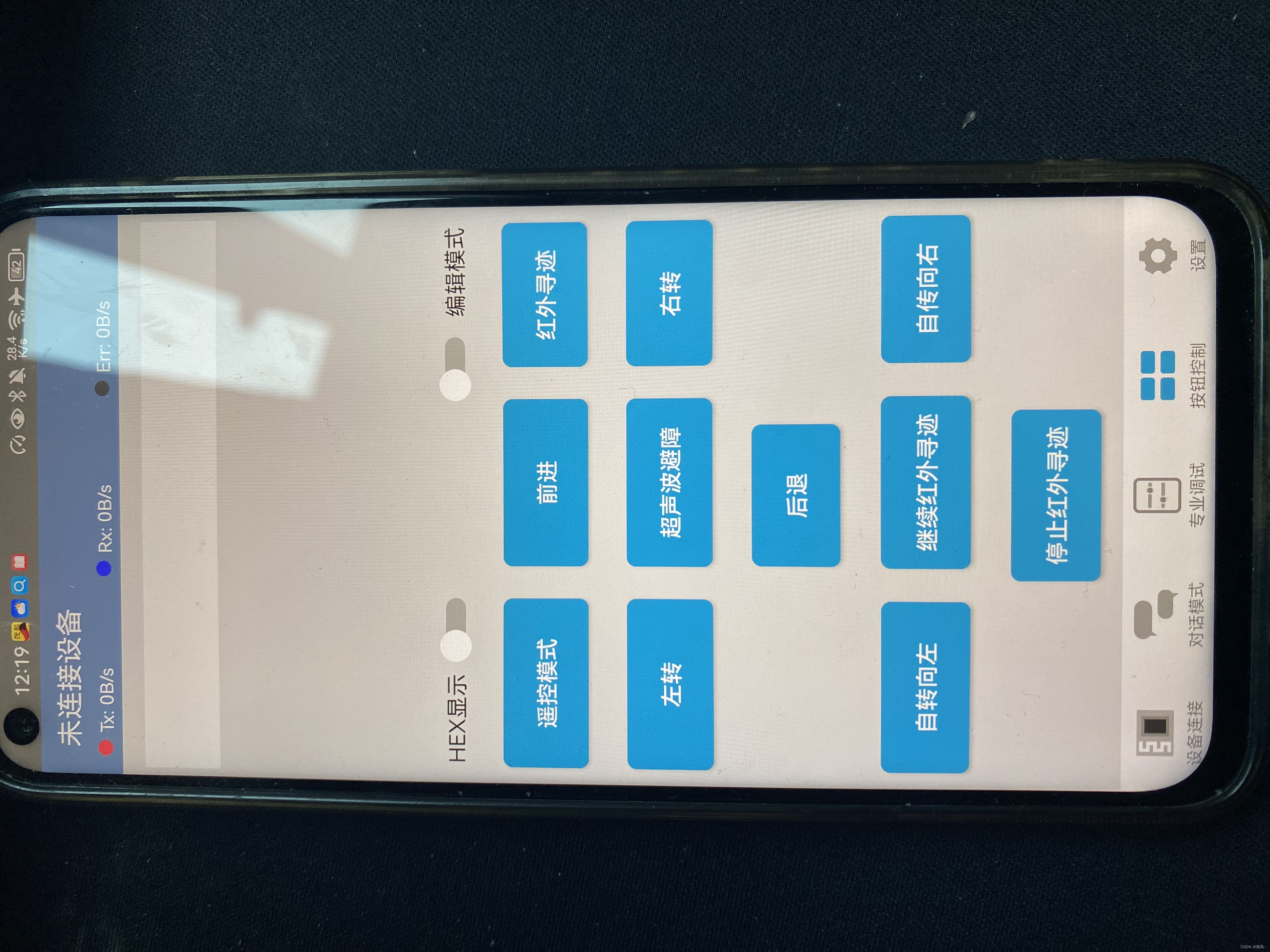
可以使用蓝牙控制小车,并且用蓝牙切换模式。
最终效果:
红外循迹:
超声波避障:
这样子看起来还是很凌乱,并且接线容易松动,所以画了电路板。
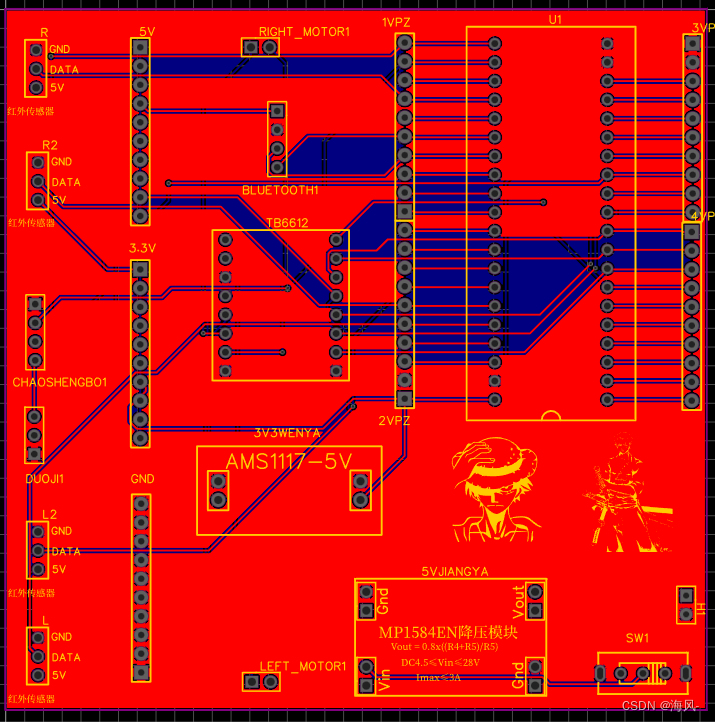
pcb版的小车在这篇博客中:https://blog.csdn.net/m0_71523511/article/details/136222225
一、硬件需求
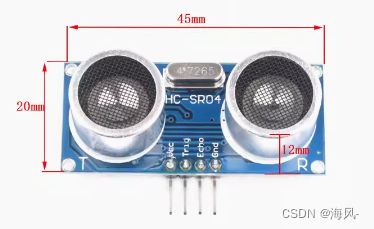
①超声波模块
②舵机
可以用sg90,也可以用更好的

③舵机云台

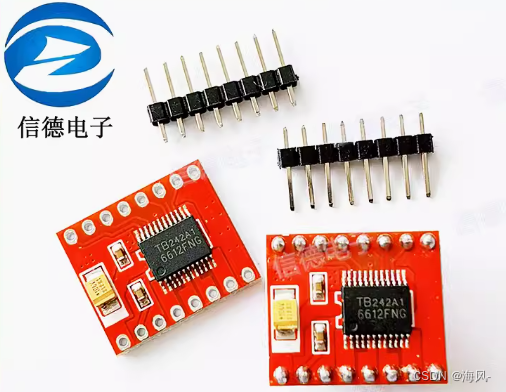
④TB6612电机驱动芯片
⑤3.3V降压模块

⑥5V降压模块

⑦STM32F103C8T6
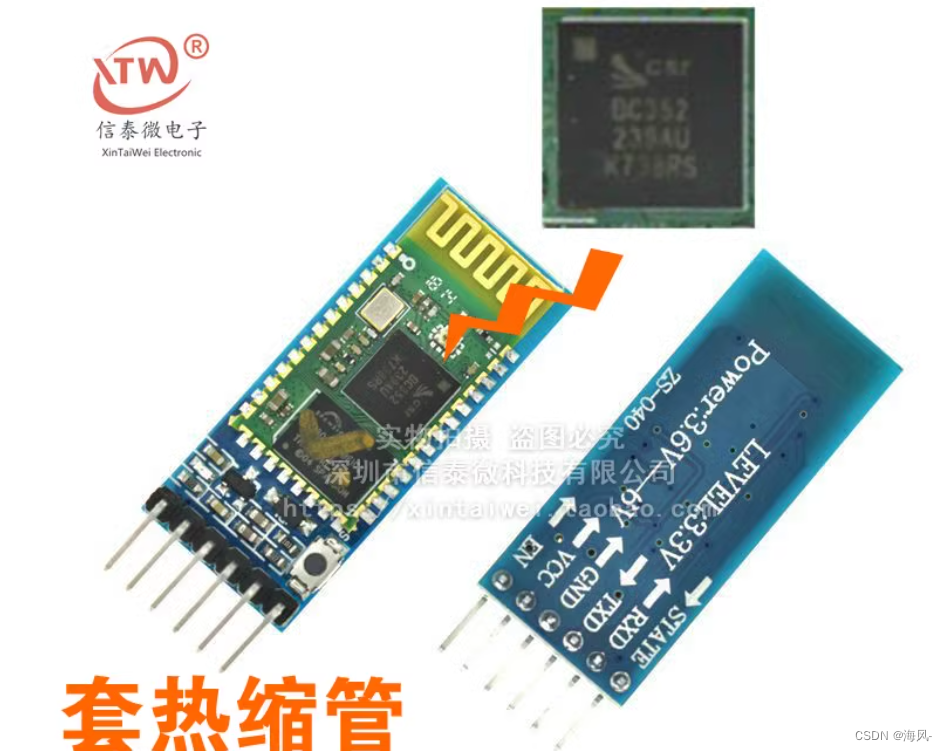
⑧蓝牙模块(HC-05)
⑨18650电池两节

⑨电池盒

⑩车架及车轮

杜邦线(公对公、公对母、母对母)

以上是必须要的硬件,下面是最好要有的:
①下载器(方便调试):ST-Link、J-Link等,当然也可以串口下载
②万用表:有时候程序烧进去与预期不一样,可能是电源或者接线问题,用万用表可以很快找到问题
③双面胶和小木条:用来固定红外循迹模块
④黑色电工胶带:循迹时要自己贴到地上模拟路线。
⑤洞洞板:让排版好看一点,也可以用万用板。
⑥铜柱、螺丝刀、螺母、螺丝:可能会用到,比如固定舵机什么的。
⑦电烙铁:焊接电源线。
二、小车搭建
硬件齐全之后直接组装并不是一件明智的事,应该按顺序测试每一大块:
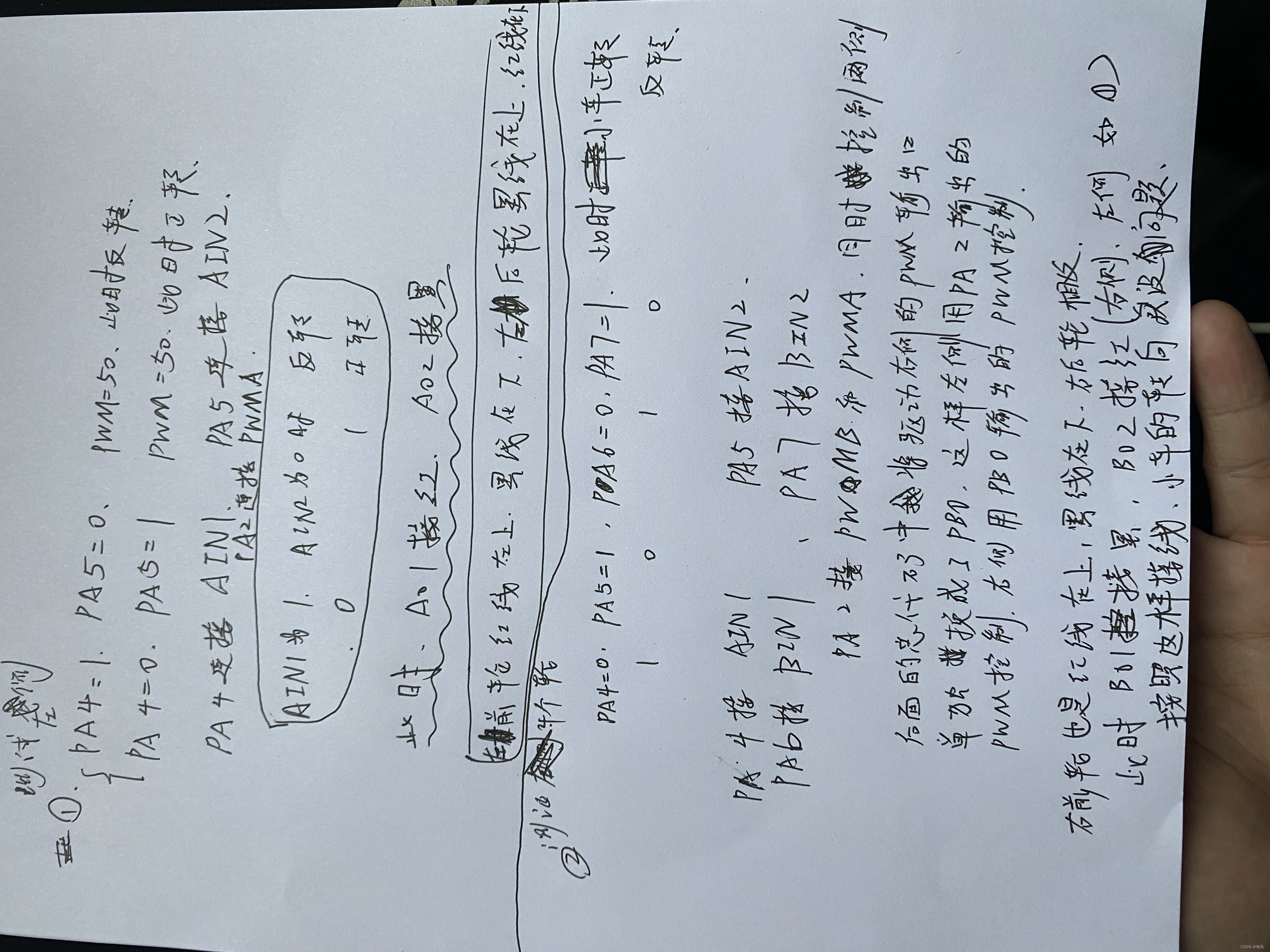
①驱动电机转动
首先将车子底盘组装好,然后规定正转与反转的方向:
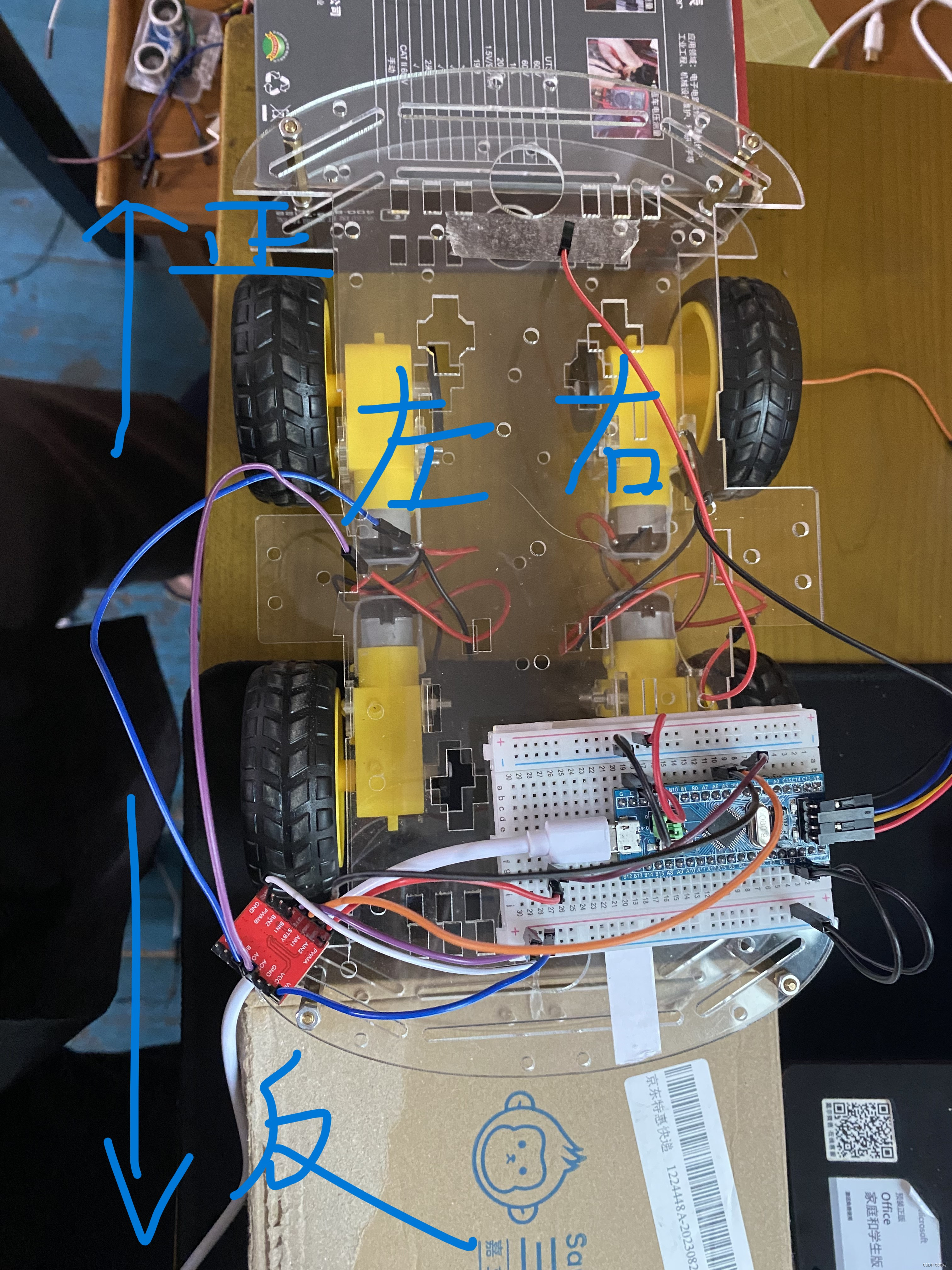
TB6612驱动芯片的介绍可以参照这篇博客里的,这里直接给出测试过程和接线,这样就完全适配程序(这里每部分的测试代码都会放到网盘里,到文章最后找):
②蓝牙控制电机
在驱动电机转动的基础上,此时只需要将蓝牙模块的引脚接上就可以,Rx接PA9,Tx接PA10。
然后下载程序,手机打开蓝牙调试器,最后的工程项目中有,只有安卓手机能用,连接蓝牙之后就可以调试了:
③加上蓝牙控制舵机
舵机需要5V电源,在前面两个的基础上,将舵机的橙色线接到PB0即可:
④加入超声波模块
将超声波模块的trig引脚接入PB12、echo引脚接入PB13,使用5V供电:
⑤测试红外循迹模块
这里将四个红外循迹传感器都要做一遍测试,就是看它能否正常工作,当能接收到反射回来的红外线时,这个模块的DO引脚就输出低电平,如果距离过远,或者是射到了黑色的物质上,红外线没法反射回来,此时DO引脚输出高电平,靠这个逻辑就能实现简单的循迹。
这里将传感器得DO引脚接到PB6(设置成浮空输入),通过判断PB6引脚的高低电平,来控制led亮灭,led一脚接gnd,另一脚接PB7。如果led灭,表示红外传感器没有距离地面过远或者是对着黑色物质,如果led亮,表示红外传感器距离地面过远或者是被黑色物质吸收。
⑥实现超声波避障
有了①②③④的测试就可以组装一下车子然后测试超声波避障了,此时可以用充电宝给stm32供电,看看能不能正常工作,可以的话就可以上电池了。
⑦实现红外循迹
从小车的右向左,对应的DO口引脚分别是:PB15、7、6、8,按照这个顺序接好,然后自己搞一搞应该怎么放红外传感器就可以开始烧代码测试了:
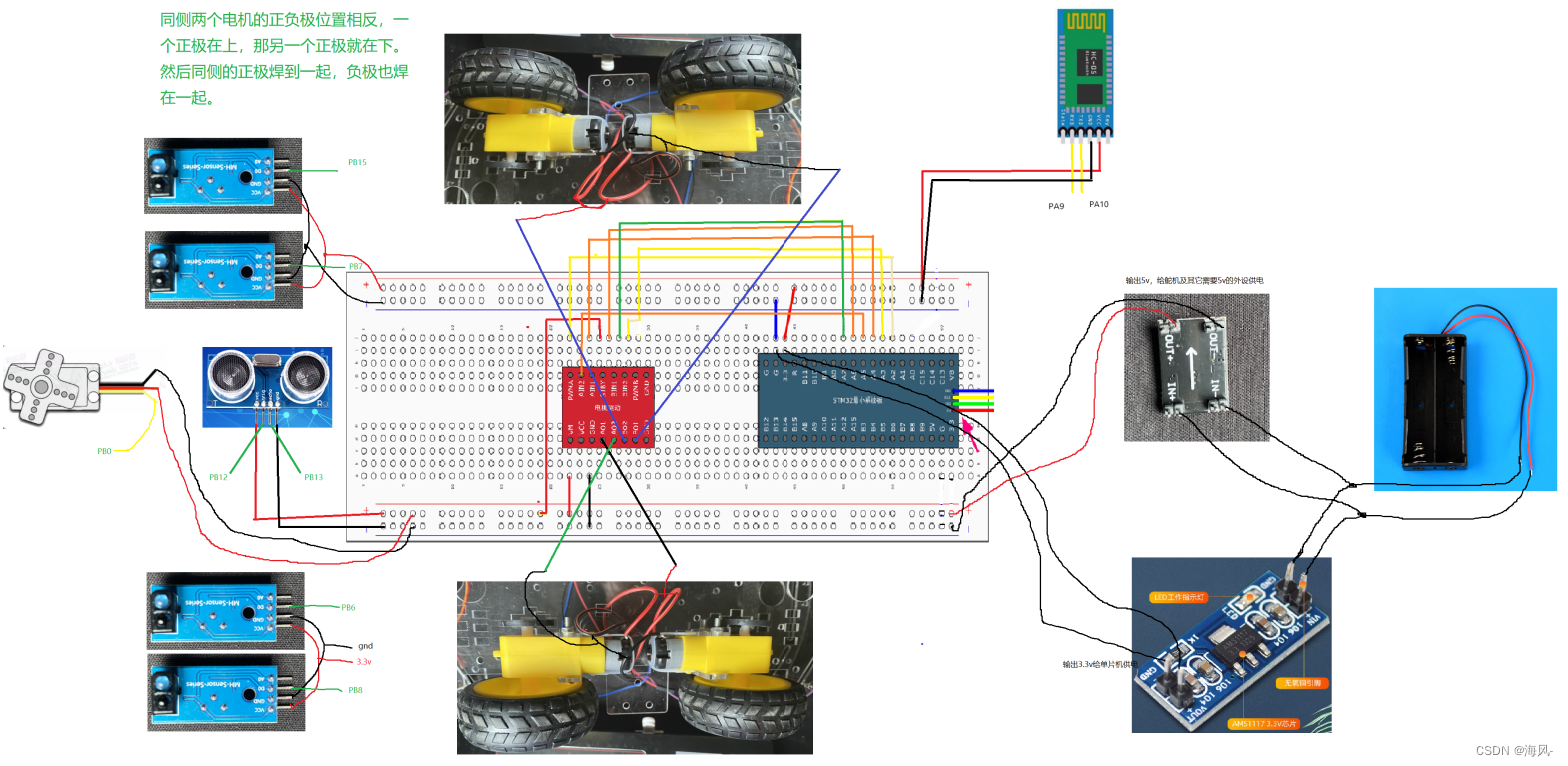
⑧最终整体接线
前面的测试全都成功之后就可以整体组装起来,烧录最终代码,手机蓝牙app设置好相应按键值就可以玩耍了:
在调试的过程中可能会遇到各种问题,比如蓝牙连不上、舵机不转等,一般都是电源的问题。蓝牙在使用之前最好设置一下,我这里使用的是arduino设置了蓝牙的名字和密码等,https://blog.csdn.net/m0_71523511/article/details/135734211
这篇博客有写着详细过程和代码。应该也是可以使用usb转ttl去设置的,这里自行尝试。
三、项目源码
关注私聊


















 13万+
13万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









