






模糊控制是一种基于模糊逻辑理论的控制方法,它允许我们在面对模糊和不确定信息的情况下进行决策和控制。与传统的精确控制方法相比,模糊控制更能够处理那些难以精确建模或规划的系统,因为它允许我们使用模糊的概念和规则来描述系统的行为。
首先,让我们来了解模糊逻辑。在传统的逻辑中,一个命题要么为真,要么为假,这是二元逻辑。而在模糊逻辑中,一个命题可以部分地、模糊地为真或假,这使得我们能够更好地处理模糊和不确定的信息。模糊逻辑通过使用隶属函数(Membership Function)来描述一个变量对某个模糊集合的隶属程度,例如“温度高”或“速度快”。
在模糊控制中,我们首先需要对输入和输出进行模糊化。这意味着将输入和输出通过隶属函数映射到一个模糊子集的范围内,从而将精确的数值转换成模糊的概念。例如,将温度值通过隶属函数转换为“冷”、“温暖”、“炎热”等模糊概念。
常用三角形隶属函数C语言表示
#include <stdio.h>
// 定义一个三角形隶属函数
float triangle_membership(float x, float a, float b, float c) {
if (x <= a || x >= c) {
return 0.0; // x不在三角形的范围内,隶属度为0
} else if (x >= b) {
return (c - x) / (c - b); // x在三角形右侧,计算隶属度
} else {
return (x - a) / (b - a); // x在三角形左侧,计算隶属度
}
}在MATLAB中显示为
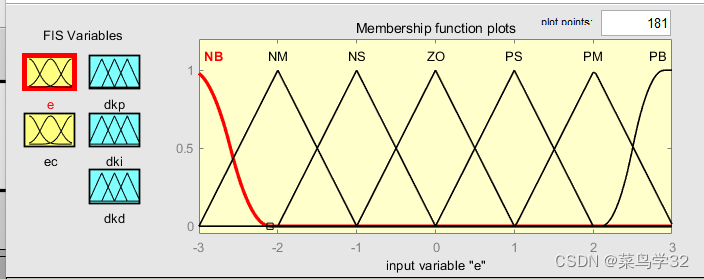
一般隶属函数都是有多个的,当我输入一个值的时候,可以把这个值代入到所有的隶属函数返回其隶属度,然后取最大的值那个为该隶属度函数。
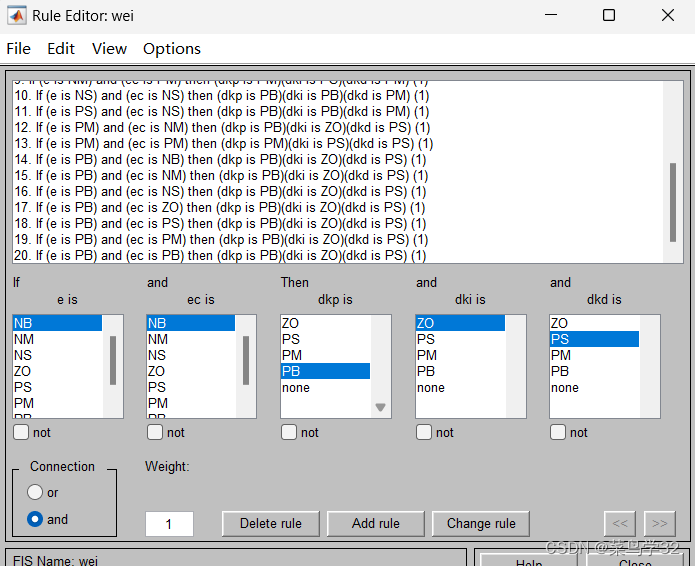
接下来,我们需要定义一组模糊规则,这些规则通常是基于专家知识或经验得出的。这些规则描述了系统的输入和输出之间的关系,比如“如果温度冷且湿度高,那么加热器输出强”这样的规则。
在C语言中是使用if进行判断即可。在MATLAB中也是使用这样的规则。
然后,我们进行模糊推理,利用前面定义的模糊规则来对模糊化后的输入进行推理,得出模糊输出。这一步骤涉及到模糊逻辑运算,例如模糊与、模糊或等。
最后,其通过模糊推理后得到的还是模糊语言,也就是隶属度函数。我们需要进行解模糊,将模糊输出转换为具体的控制动作或信号,这通常通过去模糊化的过程来实现。去模糊化可以使用各种方法,例如求取模糊输出的平均值或重心法来得出精确的控制量。
C语言去模糊化
// 去模糊化(重心法)
float centroid_defuzzification(float a, float b, float c) {
// 计算三角形的重心位置
return (a + b + c) / 3.0;模糊控制在许多领域都有着广泛的应用。例如,在工业自动化中,模糊控制可以帮助调节设备的运行状态;在机器人控制中,模糊控制可以根据传感器数据来进行智能决策;在交通管理中,模糊控制可以优化交通信号灯的配时;在家电控制中,模糊控制可以根据用户的需求来调节设备的工作状态。
总的来说,模糊控制是一种灵活、鲁棒性强的控制方法,对于那些系统模型复杂、规律不确定或难以精确描述的情况下,模糊控制能够提供一种有效的解决方案。通过模糊控制,我们能够更好地处理模糊和不确定的信息,并进行有效的决策和控制。
以下是模糊控制PID的仿真过程
对于一个传递函数为
模糊matlab仿真图如下:
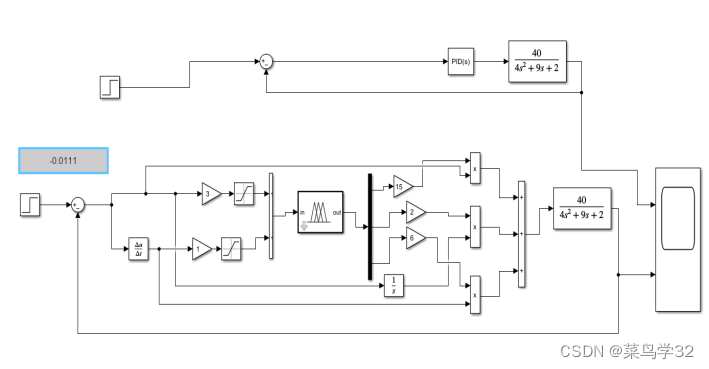
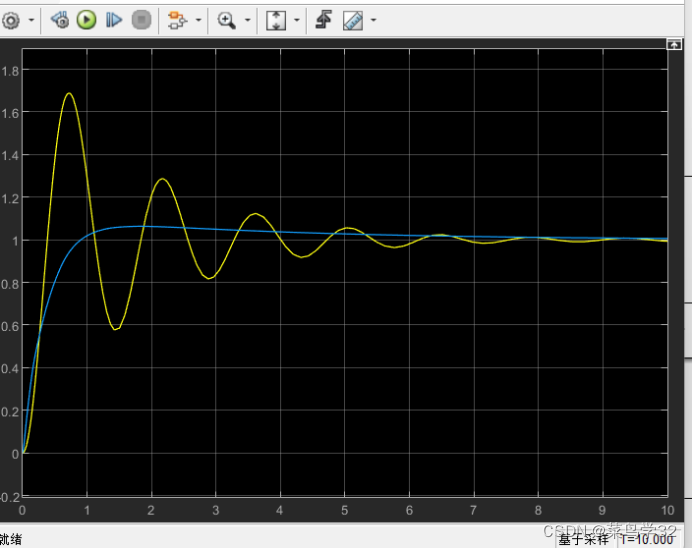
在对传统PID控制调参的过程,PID的三个值往往很难确定,特别是运用在硬件机器上,因为不知道输入PID的值给系统时会出现什么情况,这样会有很大的风险,在调参的过程也是非常痛苦。使用模糊控制PID就可以避免繁琐的调参过程。使用模糊PID的注意要在模糊输入限制在设计模糊输入的量程范围内,以免反馈回来的误差值是过大或过小,这样映射不到隶属函数甚至映射到错误的隶属函数。我的想法是在误差前设置比较高增益以确保误差值会大于模糊输入的最大值,然后限制限制其最大值是模糊输入的最大值。在模糊输出的也设置增益,这里的参数是要进行调整的,过大或者过小都会影响系统的性能。
但总的来说,模糊控制实现面对模糊和不确定信息的情况下进行决策和控制,即使在PID控制过程中系统因为某些磨损而发生改变了,例如平衡车再放置重物也能适应。
这是本人的对模糊控制的简单理解。如有错误多多指出我这菜鸟。















 6066
6066











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









