







一,概要
本项目使用MPU6050辅助IIC接口,挂载HMC5883L形成九轴传感器(加速度计、陀螺仪、磁力计)
资料:zysampof/zysampof-MuDong-MPU6050-Auxiliary-I2-C (github.com)(代码,原理图,制版文件,参考文档)
江协科技:资料下载(江协科技永远的神)
备注:项目暂未测试,欢迎留言交流
二,软件
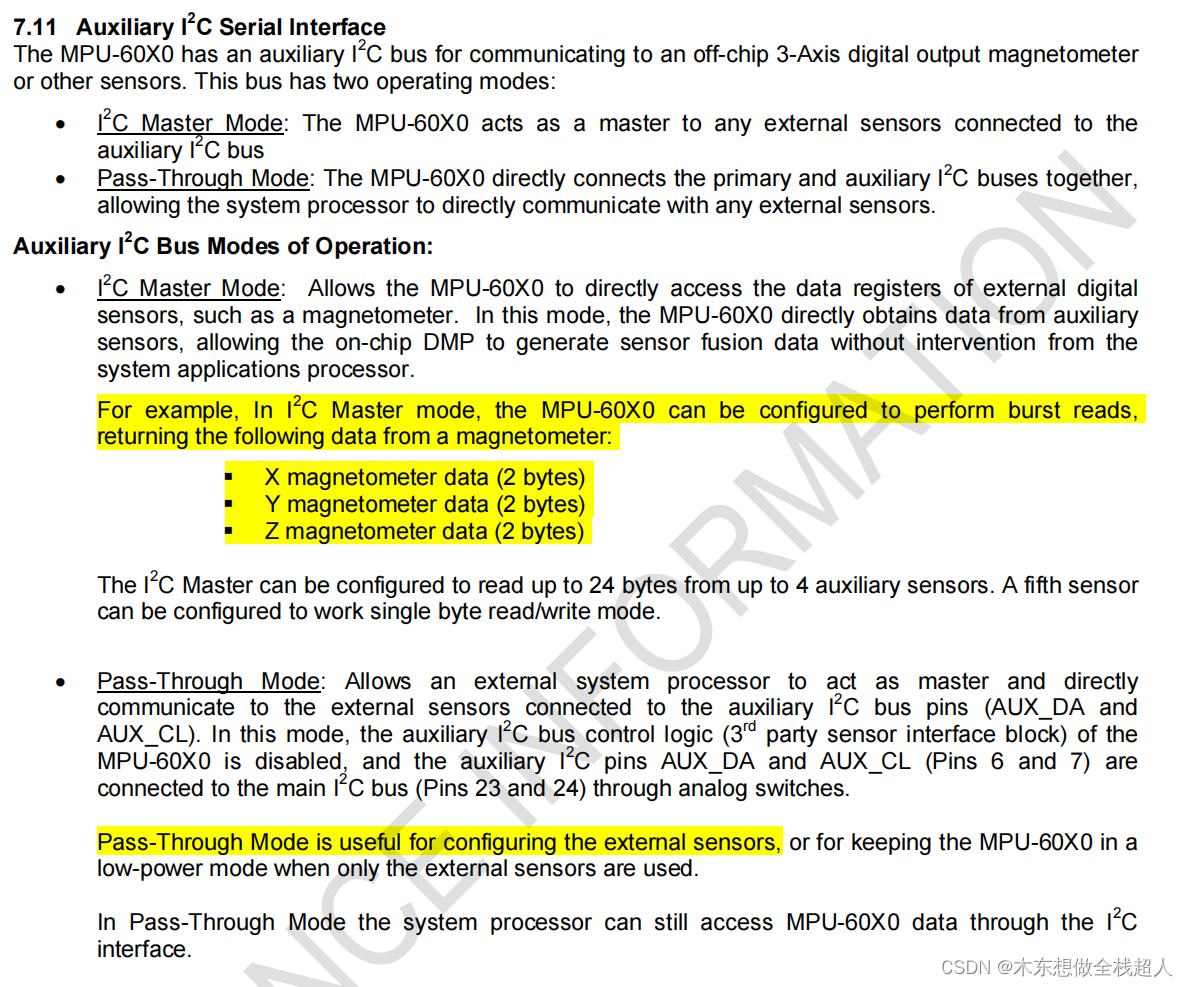
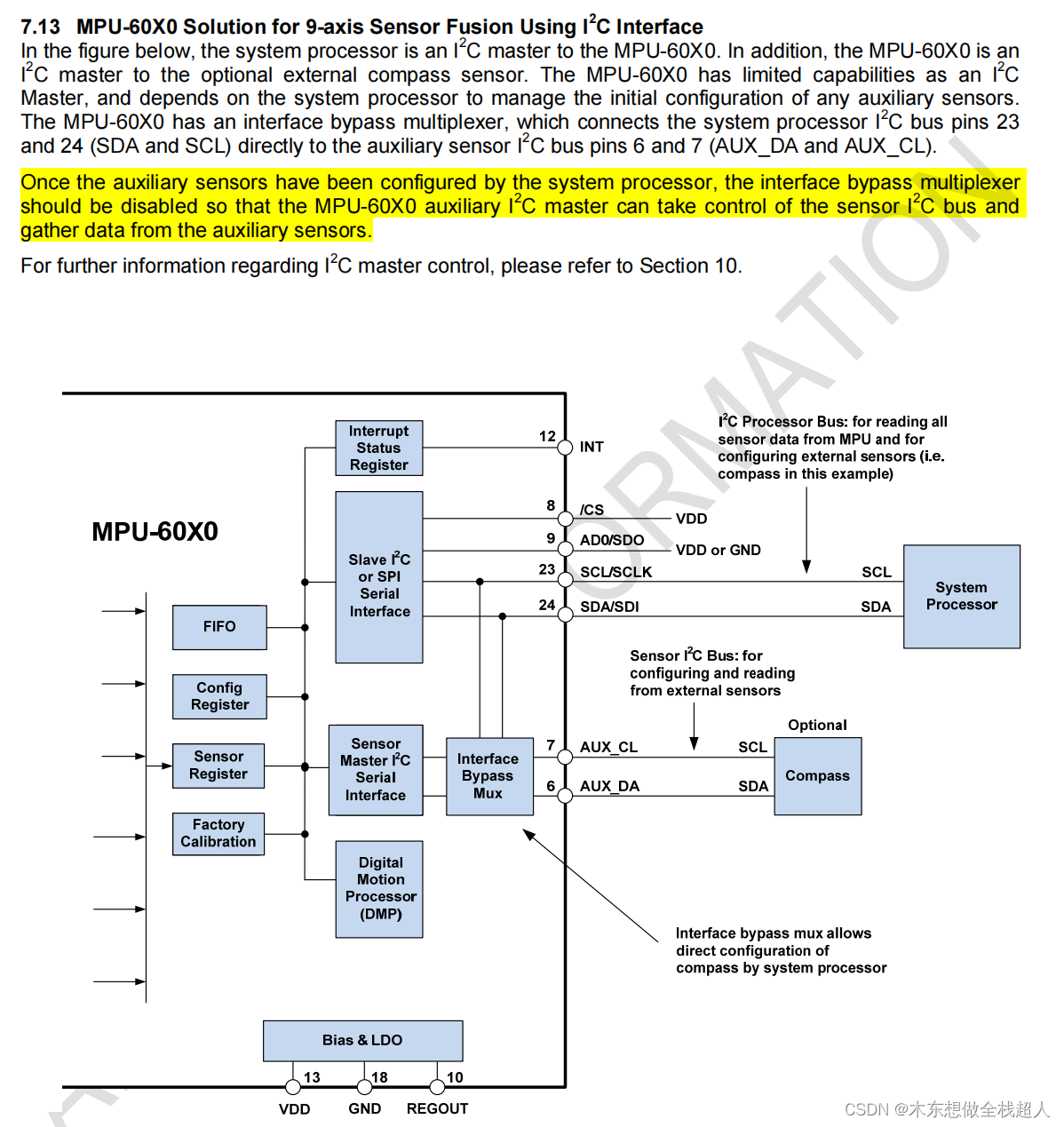
辅助IIC有两种模式,一种是主模式,用于MPU6050读取外部传感器数据;一种是直通模式,用于系统处理器配置外部传感器
一,概要
本项目使用MPU6050辅助IIC接口,挂载HMC5883L形成九轴传感器(加速度计、陀螺仪、磁力计)
资料:zysampof/zysampof-MuDong-MPU6050-Auxiliary-I2-C (github.com)(代码,原理图,制版文件,参考文档)
江协科技:资料下载(江协科技永远的神)
备注:项目暂未测试,欢迎留言交流
二,软件
辅助IIC有两种模式,一种是主模式,用于MPU6050读取外部传感器数据;一种是直通模式,用于系统处理器配置外部传感器
 840
1065
840
1065

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























