






一.直流电机的工作原理
1.1 直流电机的基本结构
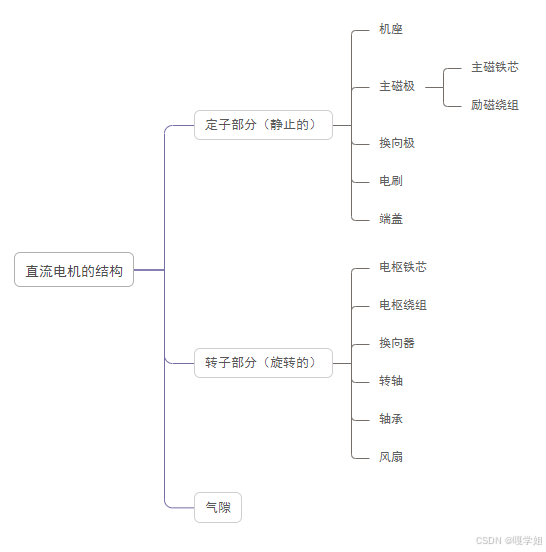
直流电机分为直流电动机和直流发电机两大类。从直流电机的主要结构来看,发电机和电动机没有太大差别,主要是由定子部分、转子部分和气隙组成。
1.2 直流电机的基本工作原理
直流电动机的基本工作原理:
直流电流通过电枢线圈,与磁场相互作用产生力矩,电枢开始旋转。通过换向器不断改变电流方向,使电动机能够持续旋转并驱动负载。
直流发电机的基本工作原理:
当电枢在磁场中旋转时,根据电磁感应原理,产生感应电动势,电枢旋转过程中,感应电动势方向周期性变化,从而产生交流电,换向器将交流电转为直流电,电刷与换向器接触,将电流输送到外部负载。
1.3 直流电机的额定数据
额定值:厂家根据国家标准,规定电机正常运行时的有关电量或机械量设计、试验的数据。
额定容量(额定功率):电机的输出功率。
额定电压:电机在额定状态下电枢线端的电压。
额定电流:电机在额定电压下运行,输出功率为额定功率时,电机线端的电流。
额定转速:电机在额定状态下运行时转子的转速。
对发电机有:
对电动机月:(
——电动机的额定效率)
二.直流电动机的数学模型
2.1 直流电机的电路——电枢绕组
2.2 直流电机的磁场
电枢反应:指电枢磁势对由励磁磁势建立起来的气隙磁场的影响。
电枢反应对气隙磁场的作用:①使气隙磁场发生畸变,每极下的磁场,一般加强,一般减弱 。②B=0时对应的物理中性线与几何中性线重合,有电枢反应时,发生物理中性线偏离。③饱和时,气隙磁场呈去磁作用。
2.3 感应电势和电磁转矩
感应电势:指正负电刷间的感应电势,即一条支路的电势。
(
称为电势结构常数)(
:磁极对数,
:并联支路对数)
电磁转矩:指作用在整个电枢上的转矩。
(
称为转矩常数)(
:磁极对数,
:并联支路对数)
2.4 直流电动机数学描述
直流电动机的基本方程(以他励直流电动机为例)

电枢回路:
励磁回路:
感应电势:
电磁转矩:
转矩公式:,
机电能量转换公式:
能量转换:
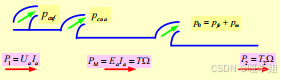
2.功率关系
三.他励直流电动机的机械特性
3.1 机械特性方程
电动机的机械特性是电动机产生的转矩(电磁转矩)T与其转速n之间的关系,即n=f(T)。
(:机械特性斜率,
:理想空载转速,
:转速降)
3.2 固有机械特性
条件:(即在额定状态下)
特性方程:
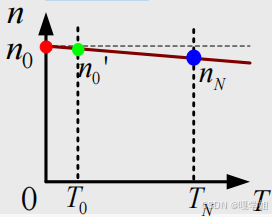
(0,)为理想空载点,实际上电机空载时存在空载损耗,使T不可能为零。
(,
')为实际空载点,电机实际空载运行时,电磁转矩必须克服空载损耗转矩,因此实际空载转速
'比理想空载转速略低。
(,
)为额定运行点,此时电机处于额定运行状态——最佳电机运行状态。
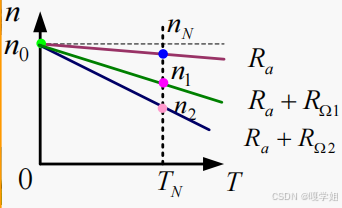
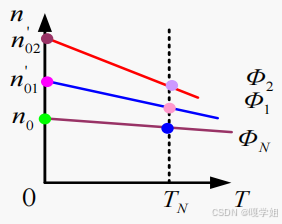
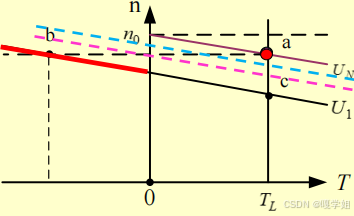
3.3 人为机械特性
(一)电枢回路串电阻:
(二)改变电枢电压:
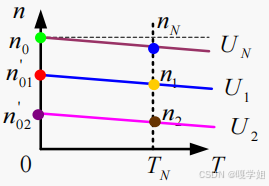
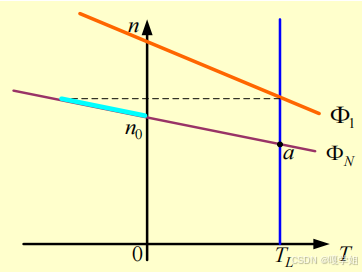
(二)减弱电动机磁通:
3.4 旋转运动时的运动方程式
一般形式:,
实用方程式:
以转速n的方 向为正方向,如果电磁转矩T的方向与转 速n的方向相同,则T取正号,反之取负号; 对负载转矩TL,与T相反,与n同向取负, 反向取正。
当T=TL时,dn/dt=0,即加速度为零,此时电动机处于两种运转状态: ①n=0→电机静止 ; ②n=常数→电机等速旋转;以上两种情况电机处于稳定运行状态,又称稳态;
当T≠TL时,dn/dt≠0,即加速度不为零: ①T>TL,dn/dt>0,处于加速状态,如起动; ② T<TL,dn/dt<0,处于减速状态,如刹车; 以上两种情况电机处于过渡过程,又称动态。
3.5 电机拖动系统的负载特性
(一)恒转矩负载:负载转矩与转速无关,即转速变化时
保持常值。
1.反抗性恒转矩负载

2.位能性恒转矩负载
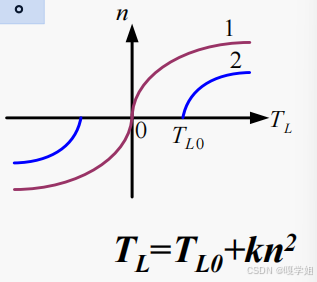
(二)通风机负载特性:负载转矩与转速n平方成正比,即
。
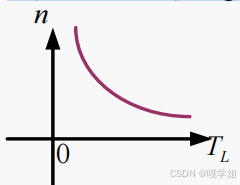
(三)恒功率负载特性:负载功率保持不变,负载转矩与转速成反比。
3.6 电力拖动系统稳定运行条件
电力拖动系统运动方程实用方程式:
稳定运行的充要条件:①和
有交点;
②交点以上,交点以下
四.他励直流电动机的起动
起动是指静止的电动机电枢通电后转动起来,达到所要求的转速为止的整个过程。
4.1 起动条件
电动机拖动负载起动的基本要求是:①起动转矩足够大:使;
②起动电流要小;
③起动设备要简单、可靠、经济。
将电机的电枢电压直接投入额定电压的起动称直接起动。直接起动起动电流很大。
起动方法(限流措施):①降低电源电压;②增大电枢电阻
4.2 电枢回路串电阻起动
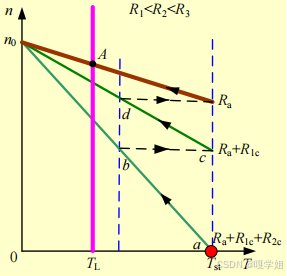
电机允许的最大转矩和电流:,
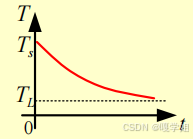
4.3 电力拖动系统的过渡过程
过渡过程:指系统由一个稳定工作状态过渡到另一稳定工作状态的过程。
过渡过程分类(根据惯性不同):①机械过渡过程(只考虑机械惯性,忽略电磁惯性,即n不能突变,,
瞬时达到稳定值)②电气-机械过渡过程(不重要)
4.4 电枢串电阻起动的机械过渡过程
(一)
(二)
(三)
与变化规律相同。
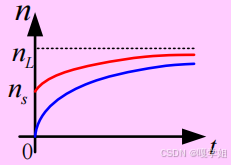
(四)过渡时间计算
(
:电机带负载运行时的稳态转速,
)
(五)机电时间常数的物理意义
机电时间常数是表征机械惯性的一个非常重要的物理量。
越大,加速度越小,过度过程时间长;
小, 加速度大,过度过程时间短。所以机电时间常数
一方面表征过渡过程时间长短,同时限制系统的加速度。
(六)加快过渡时间的措施
可以看出要加快过渡过程,就要增大dn/dt。
起动过程延缓的原因:①机械惯性大②起动电流(起动转矩)衰减
五.他励直流电动机的制动
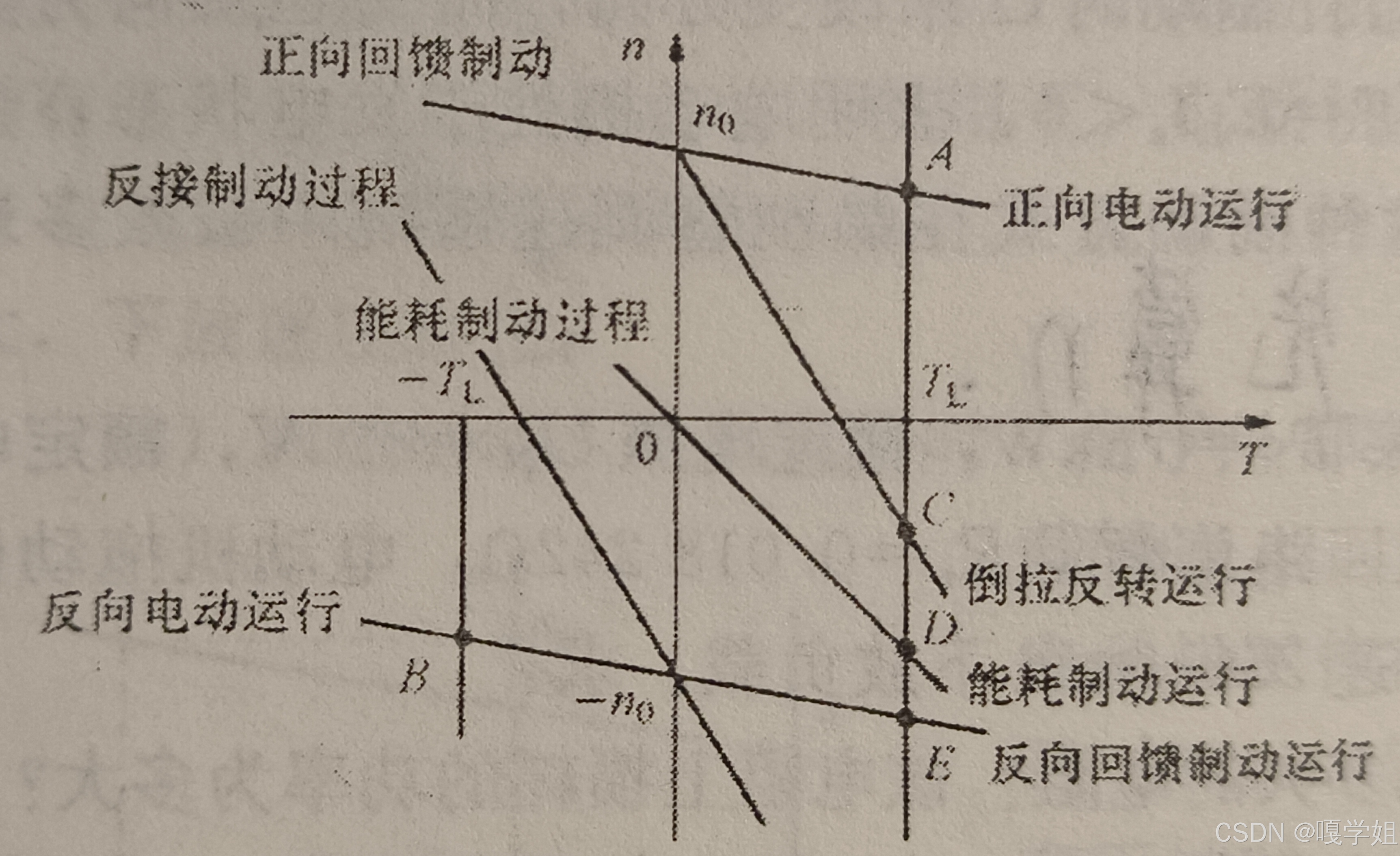
制动含义:电磁转矩T与转速n相反,机械能到电能的转化。
制动目的:①刹车②减速③制动运行.
制动方法:①机械制动②电磁制动——抱闸制动③电气制动,常用的方法有:能耗制动,反接制动,回馈制动。共同点是:在保留原来磁场大小, 方向不变的情况下,通过适当方法获得与转子旋转方向相反的制动转矩。
5.1 能耗制动
能耗制动就是电动机从电源断开后,利用拖动系统的动能产生电磁制动转矩。
5.2 反接制动
反接制动的特点是电机的电枢电压UN与感应电势Ea同向。
实现反接制动的方法:①电枢反接②转速反向
反接制动电阻比能耗制动时大,以限制电枢电流。
5.3 回馈制动
由于外部条件的变化,使电动机的实际转 速n超过理想空载转速n0,电动机运行于回馈制动状态。
(一)降压调速状态下
总功率除消耗在电阻上外,大部分回馈给电网,称为回馈制动。
(二)弱磁调速状态下
(三)拖动位能性负载
总功率除消耗在电阻上外,大部分回馈给电网,称为回馈制动。


















 3527
3527

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









