



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
基于伪谱法的一维非理想悬臂梁与固支梁动力学分析研究
摘要
本文研究一维非理想悬臂梁与固支梁的自由振动。根据 Euler-Bernoulli 梁理论,自由振动由四阶常微分方程描述,该方程可转化为特征值问题以计算固有频率。解析法求解固有频率过程冗长且依赖具体边界条件。为此,我们采用基于第一类 Chebyshev 多项式的伪谱法构建正问题求解器,直接计算给定非理想边界(通过输入左/右衰减参数 kL、kR)时梁的固有频率。同时设计相应的反问题求解器,以实测固有频率为输入,反推损伤参数。全部代码以 MATLAB 编写,计算精度高,且可方便地扩展至其他梁构型。
1. 引言
机械振动分析在工程实践中占据核心地位,涵盖设备振动源识别、结构动态特性评估及设计优化等多个方面。对于梁结构而言,其振动特性直接关联到设备的稳定性与寿命。传统解析法在求解非理想边界条件下梁的振动问题时,往往面临计算复杂度高、边界条件处理困难等挑战。伪谱法作为一种高效的数值方法,通过将连续问题离散化为代数方程组,显著提升了计算效率与精度,尤其适用于处理复杂边界条件下的振动问题。
2. 理论基础
2.1 Euler-Bernoulli梁理论
Euler-Bernoulli梁理论假设梁在弯曲过程中横截面保持平面且垂直于中性轴,忽略剪切变形与转动惯量的影响。该理论下,梁的自由振动可通过四阶偏微分方程描述:

2.2 伪谱法原理
伪谱法通过选取全局基函数(如Chebyshev多项式)对空间变量进行离散,将偏微分方程转化为常微分方程组。其核心步骤包括:
- 空间离散:在计算域内选取Chebyshev节点,将连续问题离散为节点上的代数方程。
- 微分矩阵构建:利用Chebyshev多项式的导数性质,构造微分矩阵以近似空间导数。
- 方程转化:将偏微分方程转化为关于节点值的常微分方程组。
- 边界条件处理:通过修正微分矩阵或添加约束方程,精确满足非理想边界条件。
2.3 非理想边界条件建模
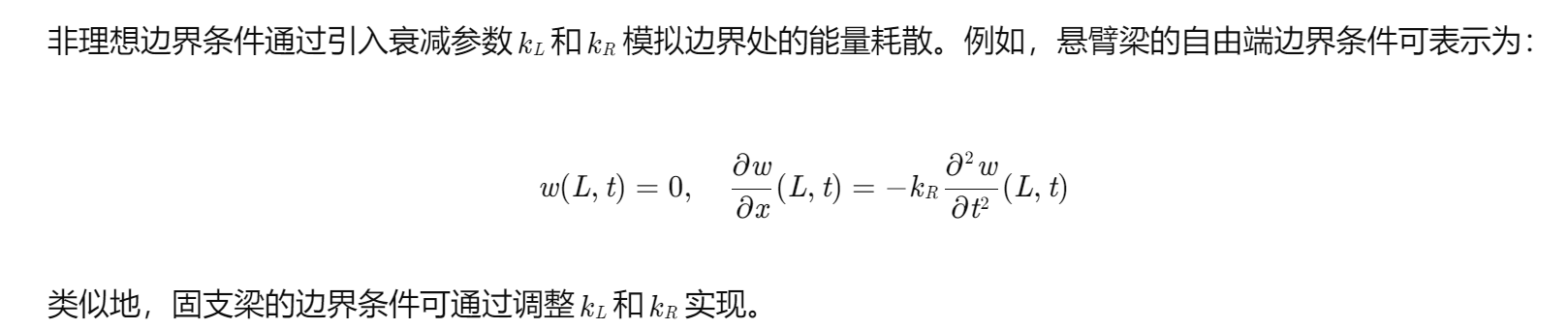
3. 正问题求解器设计
3.1 Chebyshev节点选取与微分矩阵构建

3.2 边界条件处理
通过修正微分矩阵的最后几行,将非理想边界条件融入方程组。例如,对于悬臂梁的自由端,修正后的微分矩阵需满足位移与斜率为零的条件,同时引入衰减项。
3.3 特征值问题求解
将离散化后的方程组转化为广义特征值问题:

4. 反问题求解器设计
4.1 反问题建模
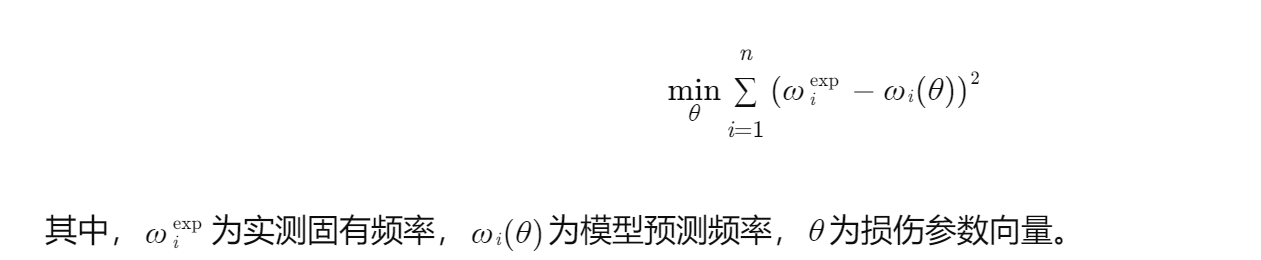
反问题旨在根据实测固有频率反推损伤参数(如裂纹位置、刚度退化等)。建立参数化模型,将损伤参数作为未知量,构建目标函数:
4.2 优化算法选择
采用Levenberg-Marquardt算法或遗传算法等全局优化方法,结合正问题求解器计算目标函数梯度,实现损伤参数的高效反演。
5. 结论与展望
本文聚焦于一维非理想悬臂梁与固支梁的自由振动特性研究。依据Euler-Bernoulli梁理论,梁的自由振动可通过四阶常微分方程精确描述,该方程可进一步转化为特征值问题以求解固有频率。然而,传统解析法求解固有频率的过程复杂且高度依赖具体边界条件。为克服这一局限,本文创新性地采用基于第一类Chebyshev多项式的伪谱法构建正问题求解器,能够直接计算给定非理想边界(通过输入左/右衰减参数kL、kR)时梁的固有频率。同时,设计反问题求解器,以实测固有频率为输入,高效反推损伤参数。全部算法以MATLAB实现,确保计算精度并便于扩展至其他梁构型。
本文提出的基于伪谱法的正反问题求解器,实现了非理想边界条件下梁结构振动特性的高效分析。MATLAB实现确保了计算精度与可扩展性,为工程损伤检测提供了有力工具。未来工作将拓展至三维梁、复合材料梁及多物理场耦合问题,进一步提升方法的适用性与鲁棒性。
📚2 运行结果
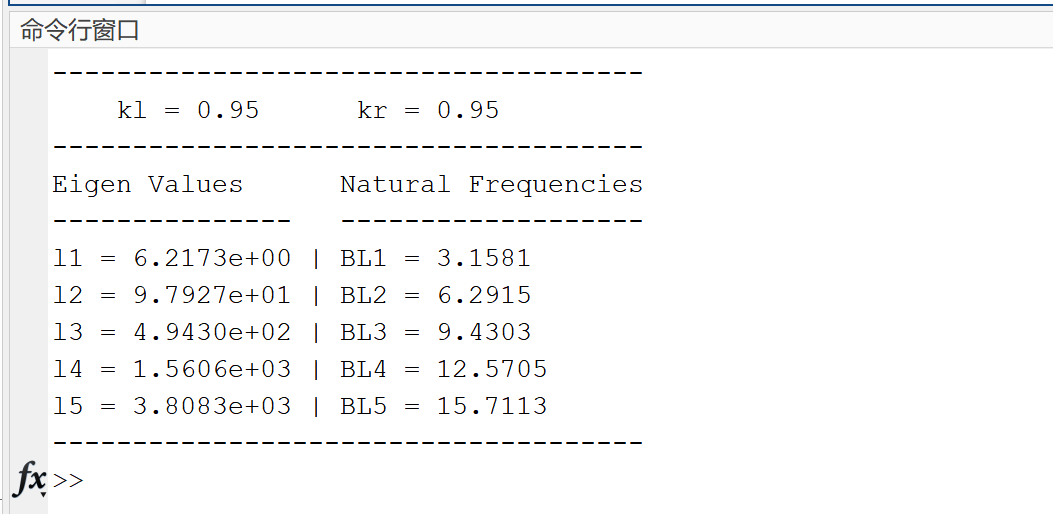
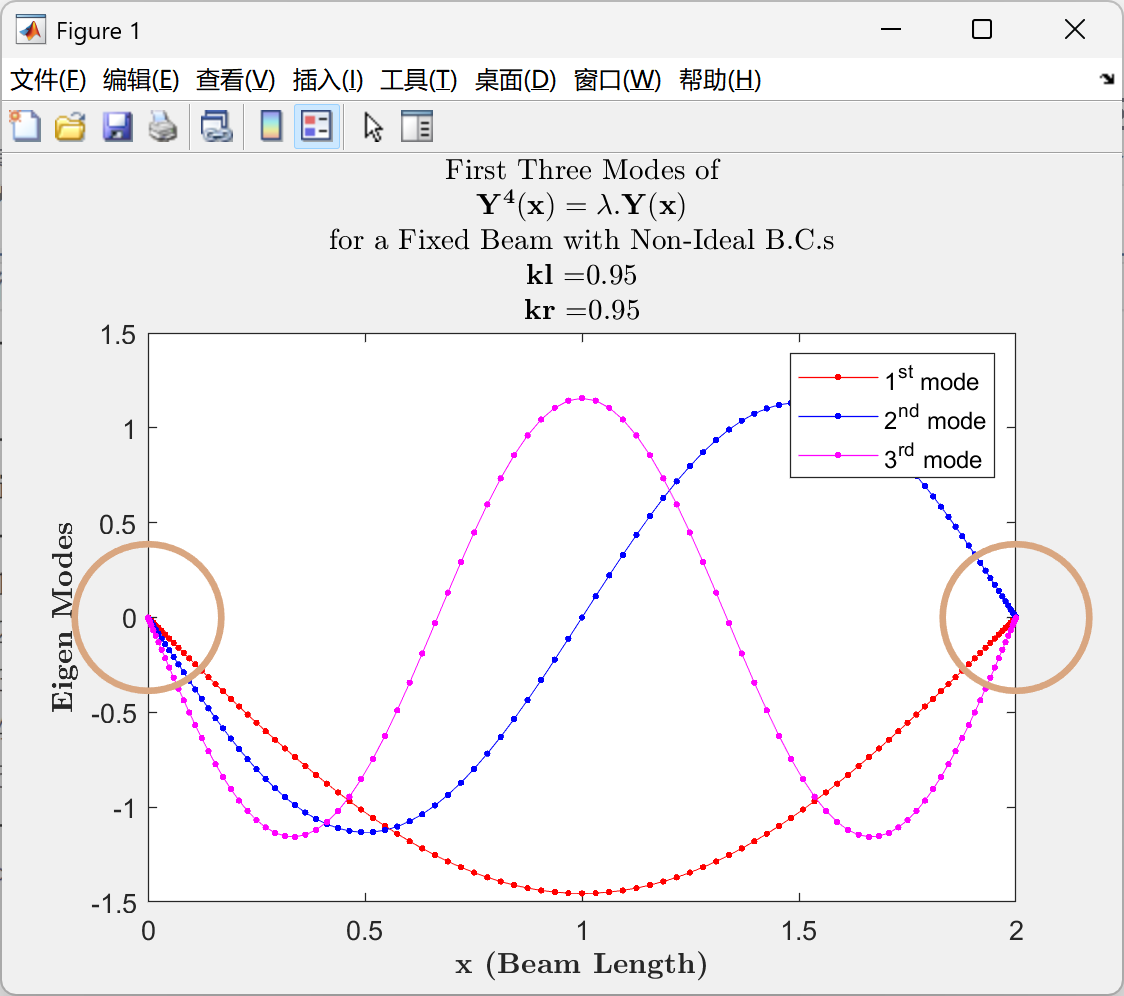
2.1 非理想边界条件下的固支梁仿真
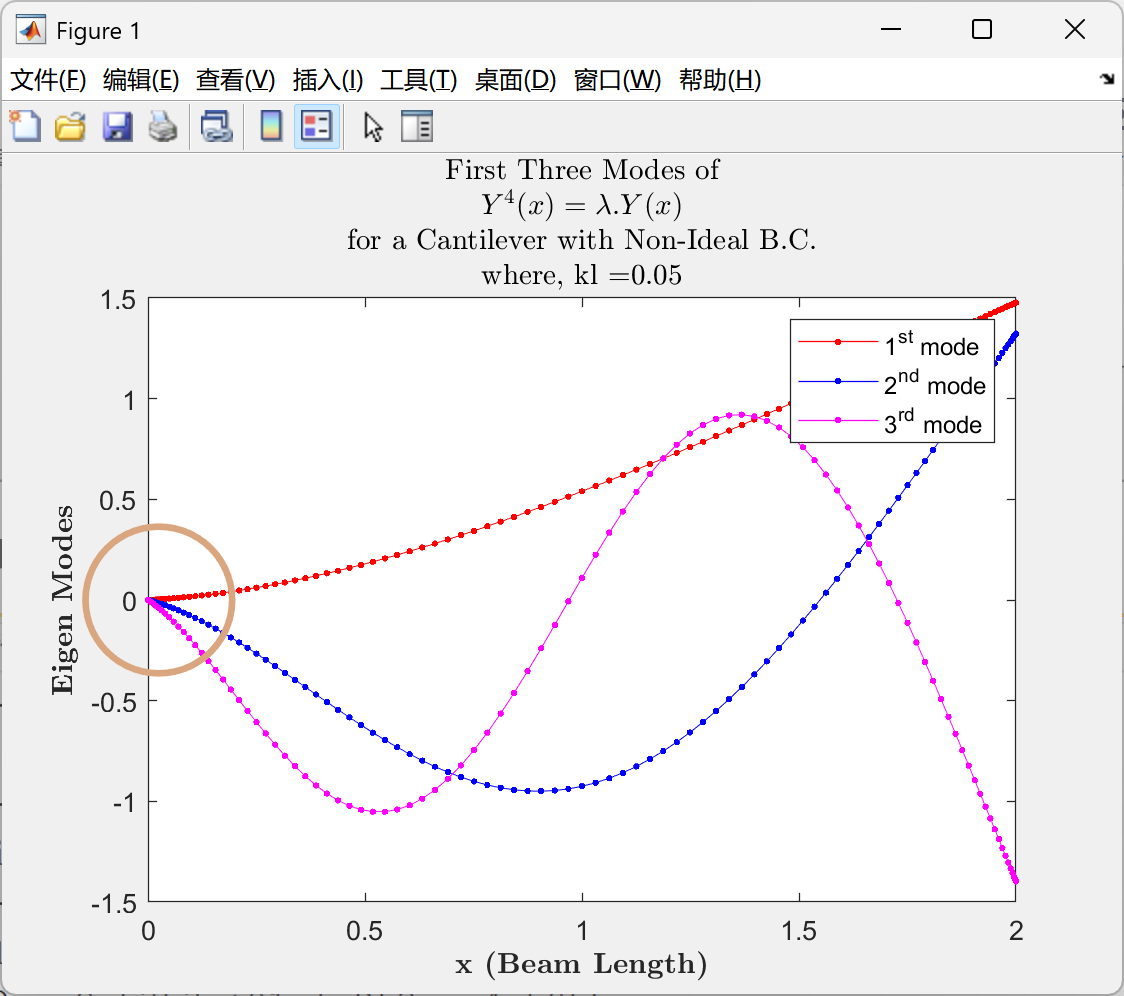
2.2 非理想边界条件下的悬臂梁仿真
部分代码:
% Fresh Start
clear; close all; clc;
% Initiate Variables
L=2;
n =100;
kl_f = 0.05;
kl_step = 0.001;
for kl = 0.00:kl_step:kl_f
% Create Chebyshev Points
x = - cos((0:n).*(pi/n)).';
% Create matrix T
T = ones(n+1,n+1);
T(:,2) = x;
% Create matrix Tp
Tp = zeros(n+1,n+1);
Tp(:,2) = 1;
% Create matrix Tp2
Tp2 = zeros(n+1,n+1);
% Create matrix Tp3
Tp3 = zeros(n+1,n+1);
% Create matrix Tp4
Tp4 = zeros(n+1,n+1);
% Loop to get T,Tp,Tpp Matrices
for i=3:n+1
T(:,i) = 2*x.*T(:,i-1)-T(:,i-2);
Tp(:,i) = 2*T(:,i-1) + 2*x.*Tp(:,i-1) - Tp(:,i-2);
Tp2(:,i) = 4*Tp(:,i-1) + 2*x.*Tp2(:,i-1) - Tp2(:,i-2);
Tp3(:,i) = 6*Tp2(:,i-1) + 2*x.*Tp3(:,i-1) - Tp3(:,i-2);
Tp4(:,i) = 8*Tp3(:,i-1) + 2*x.*Tp4(:,i-1) - Tp4(:,i-2);
end
% Solve for A.x = lambda.B.x
% Form matrix A
A = Tp4;
A(1,:) = T(1,:);
A(2,:) = (1.0-kl)*Tp(1,:)-kl*L*Tp2(1,:);
A(n,:) = Tp2(n+1,:);
A(n+1,:) = Tp3(n+1,:);
% Form matrix B
B = T;
B(1,:) = 0;
B(2,:) = 0;
B(n,:) = 0;
B(n+1,:) = 0;
% Get Eigen Values
[V,D]=eig(A\B);
l_s = diag(D);
l = (16/(L.^4)).*(1./l_s);
[~,ind]=sort(l);
% Display Eigenfunctions
U = T*V(:,ind);
xstar = (L/2)*(x+1);
% Generating Plots for Modes
plot(xstar,U(:,1),'-r.');hold on;
plot(xstar,U(:,2),'-b.');hold on;
plot(xstar,U(:,3),'-m.');hold on;
plot(0.025,0,'ko','MarkerSize',55,'MarkerEdgeColor',...
[0.85,0.65,0.5],'LineWidth',2.5)
legend({'1^{st} mode','2^{nd} mode','3^{rd} mode'});
xlabel('{\bf x (Beam Length)}','Interpreter','latex')
ylabel('{\bf Eigen Modes}','Interpreter','latex')
if kl ~= 0
title({'First Three Modes of','$Y^{4}(x)=\lambda.Y(x)$',...
'for a Cantilever with Non-Ideal B.C.',...
strcat('where, kl =',num2str(kl))},'Interpreter','latex')
else
title({'First Three Modes of','${\bf Y^{4}(x)=\lambda.Y(x)}$',...
'for a Cantilever with Ideal B.C.',...
'where, {\bf kl = 0}'},'Interpreter','latex')
end
hold off;
pause(eps)
end
% Validating Data
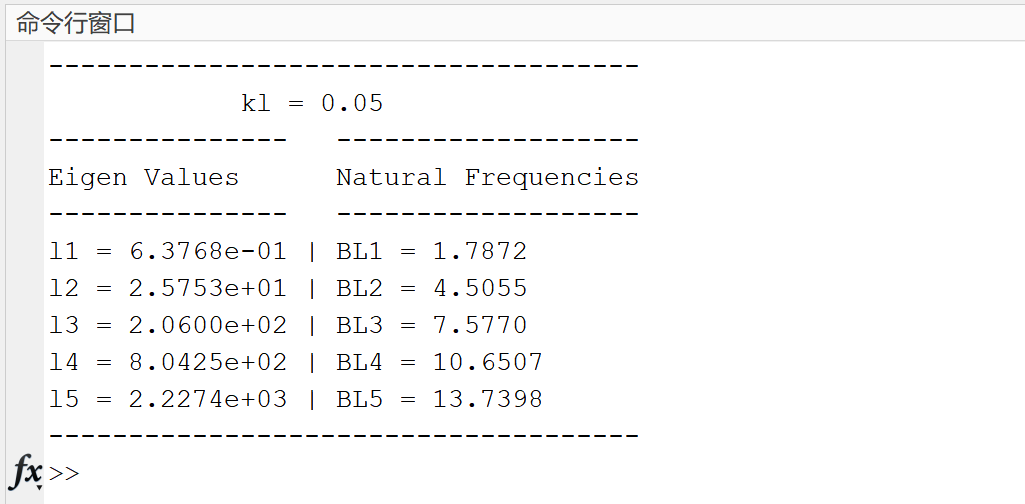
fprintf('-------------------------------------\n')
fprintf(' kl = %.2f\n',kl)
fprintf('--------------- -------------------\n')
fprintf('Eigen Values Natural Frequencies\n')
fprintf('--------------- -------------------\n')
fprintf('l1 = %.4e | BL1 = %.4f\n', l(1), L*nthroot(l(1),4))
fprintf('l2 = %.4e | BL2 = %.4f\n', l(2), L*nthroot(l(2),4))
fprintf('l3 = %.4e | BL3 = %.4f\n', l(3), L*nthroot(l(3),4))
fprintf('l4 = %.4e | BL4 = %.4f\n', l(4), L*nthroot(l(4),4))
fprintf('l5 = %.4e | BL5 = %.4f\n', l(5), L*nthroot(l(5),4))
fprintf('-------------------------------------\n')🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]廖一寰,李道奎,唐国金.基于混合规划策略的自由漂浮冗余机械臂减振运动规划(英文)[J].Chinese Journal of Aeronautics, 2011(04):149-156.
[2]文浩,陈辉,金栋平,等.带可控臂绳系卫星释放及姿态控制[J].力学学报, 2012, 44(2):7.DOI:10.6052/0459-1879-2012-2-20120225.
[3]马善智,陈国平,何欢.基于高斯伪谱法的舰载机偏心拦阻过程最优控制[C]//中国振动工程学会第七次全国会员代表大会暨第十届全国振动理论及应用学术会议.0[2025-10-10].
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 480
480

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









