






基于模型参考自适应系统的改进滑模观测器
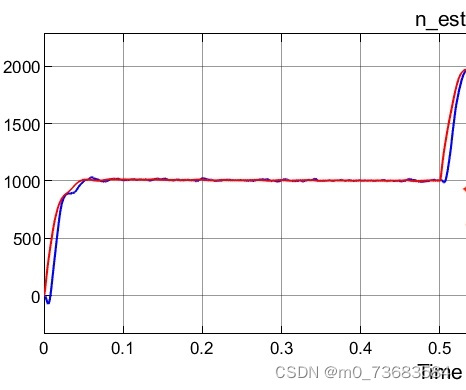
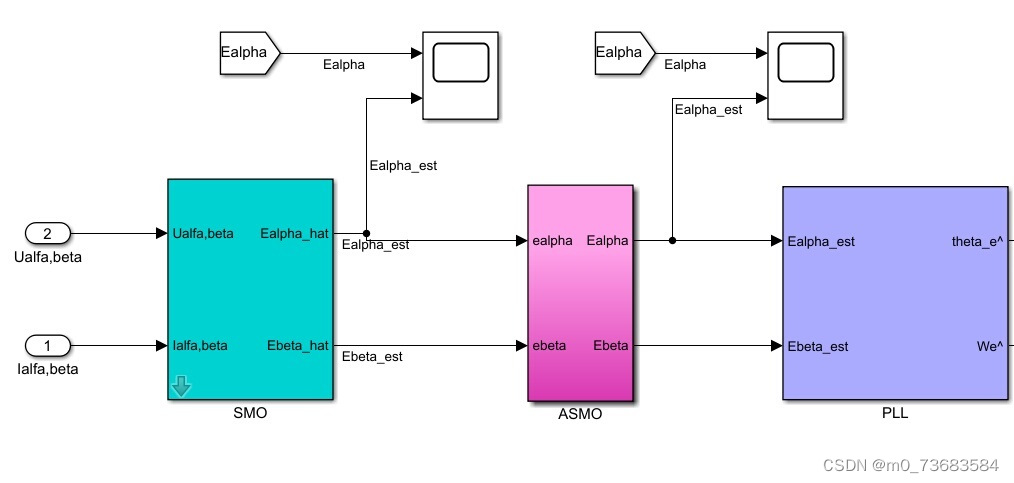
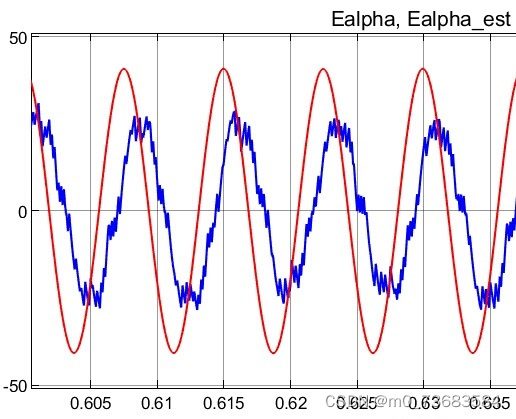
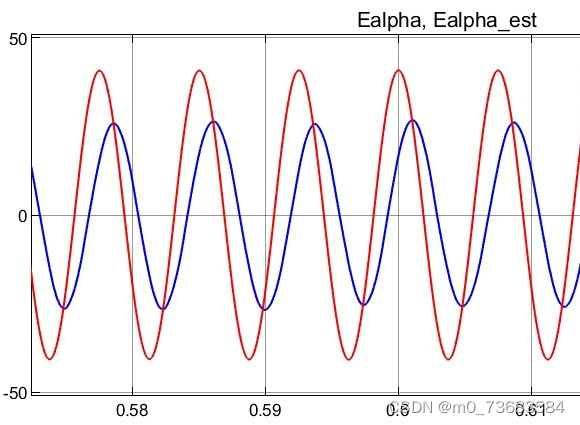
1.采用基于模型参考自适应系统的反电势优化方法,对SMO中低通滤波后的反电势进一步优化,从而减小抖振,提高转速和位置估计精度;
2.提供算法对应的参考文献和仿真模型。
ID:2768676485270145 努力惜春华JW
努力惜春华JW
基于模型参考自适应系统的改进滑模观测器
1.采用基于模型参考自适应系统的反电势优化方法,对SMO中低通滤波后的反电势进一步优化,从而减小抖振,提高转速和位置估计精度;
2.提供算法对应的参考文献和仿真模型。
ID:2768676485270145努力惜春华JW
 5146
1万+
5146
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























