






树莓派在ROV中的作用
根据Ardusub官网(Overview · GitBook),机载计算机的作用是,将视频流通过UDP传输到上层计算机,并通过以太网在自动驾驶仪和上部计算机之间中继 MAVLink 通信。
BlueROV境外论坛
Blue Robotics Community Forums
BlueROV国内论坛
材料准备
确保USB支持 H.264 视频输出。平常用的、网上销量高的USB摄像头都是MJPG/YUYV标准的,在QGC上都没有显示。
树莓派配套的CSI摄像头也可以在QGC上显示。
实测树莓派4B不支持ardusub-0.3.31.img系统,装上此系统以后无法正常工作,无法通过PuTTY连接,也无法连接到QgroundControl。还是老老实实选择树莓派3B吧。
烧录镜像
通过此链接下载ardusub-0.3.31.img镜像文件
https://s3.amazonaws.com/downloads.bluerobotics.com/Pi/stable/ardusub-raspbian.img.zip

接下来通过Etcher为树莓派安装系统。官网上的下载的Etcher软件不知道为什么选择完镜像以后无法点击烧录镜像的按钮,只能求助群里的大佬,下面的百度网盘连接中的Etcher软件版本实测好用。
之前使用过的Win32DiskImager软件也能为树莓派烧录ardusub系统,但是不知道为什么一旦树莓派断电或者重启,树莓派就连接不上QGC了,重新烧录系统才能连上。尝试了多种办法,比如给飞控设备设置了chmod 777权限,这个问题依然无法解决。换成了Etcher软件之后问题才得以解决。
同时不要用树莓派的官方烧录工具Raspberry Pi Imager,因为这个软件会为树莓派自动配置启动文件,而我们的ardusub系统不需要HDMI输出。
烧录完操作系统,就可以通过网线将树莓派和电脑连接在一起。使用PuTTY软件通过ssh连接到树莓派,输入树莓派的静态IP——192.168.2.2,就弹出了这样一个黑框。接下来输入ardusub系统的默认用户名pi,再输入默认密码companion,就可以通过命令行操作树莓派了。

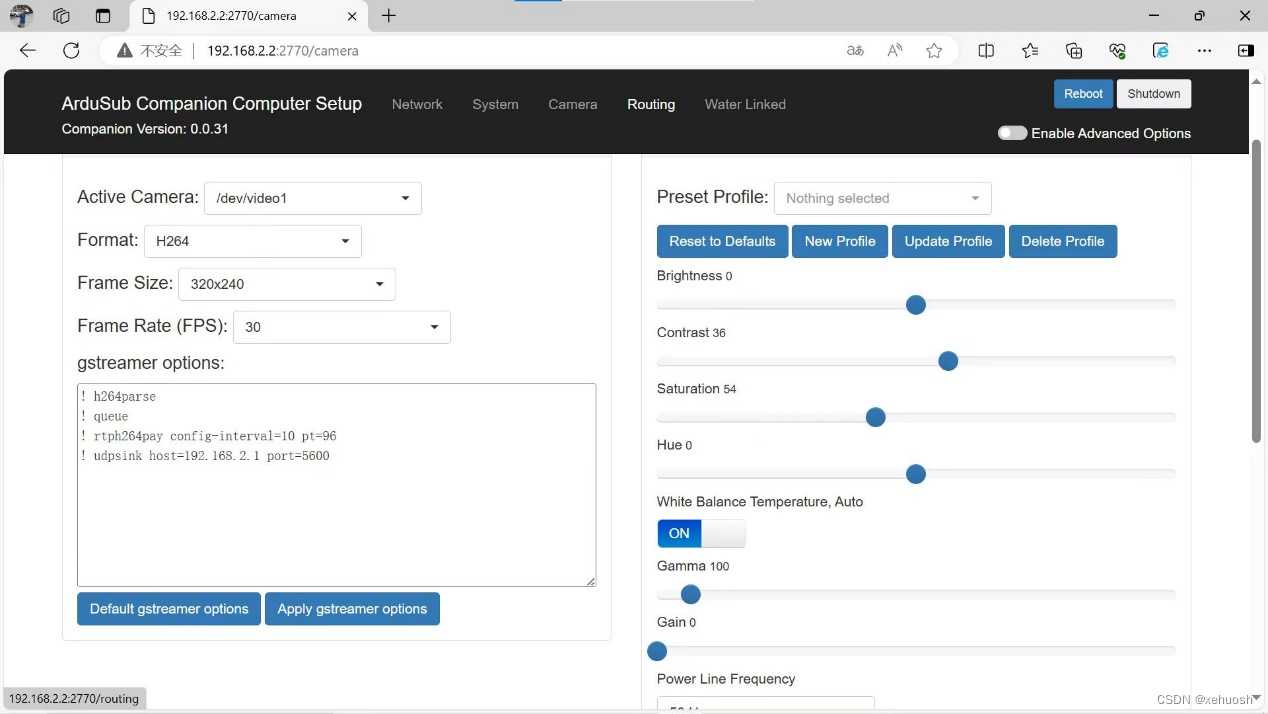
在浏览器网址框内输入192.168.2.2:2270就可以访问树莓派的图形化界面了。















 3619
3619

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









