






摘 要
我国设施农业和智慧农业的不断发展,番茄采摘机器人的应用前景日益广阔。然而,传统的人工采摘模式存在劳动强度大、效率不稳定等问题,且人力成本逐年提高,难以满足规模化生产需求。为了提高番茄采摘效率和准确性,基于机器视觉的番茄采摘机器人逐渐成为研究热点。为满足不同成熟度、不同形状及不同位置番茄的检测及定位需求,需要对机器人视觉系统进行针对性的硬件和软件设计,以适应复杂的温室及露天环境。由于番茄品种繁多、光照环境多变,视觉系统的鲁棒性和适应性要求较高。本研究围绕番茄采摘机器人的视觉系统设计展开,具体包括硬件设计、照明系统方案、图像采集与处理,以及多种特征提取与算法实现方法,从而为后续的准确识别和自动定位打下坚实基础。通过大量的试验数据统计与分析,验证了所设计视觉系统的可靠性与有效性,为进一步提升我国农业机器人现代化水平提供了参考。
关键词:番茄采摘机器人;视觉系统;硬件设计;算法优化;数据支持;自动化农业
Abstract
With the continuous development of protected agriculture and smart farming in China, tomato-picking robots have shown increasing potential for large-scale applications. However, traditional manual picking poses problems such as intensive labor, unstable efficiency, and rising labor costs, failing to meet the demands of high-volume production. To enhance efficiency and accuracy in tomato harvesting, machine vision-based robotic systems have attracted considerable attention in recent years. In order to handle tomatoes of varied ripeness, shapes, and positions under complex conditions—such as greenhouses and open-field environments—a targeted design in both hardware and software for the robot’s vision system is essential. Owing to the wide variety of tomato cultivars and fluctuating lighting conditions, the requirements for robustness and adaptability are substantial. This research focuses on the design of the visual system for a tomato-picking robot, including hardware configuration, lighting solutions, image acquisition and processing, and multiple feature extraction and algorithm implementation strategies. A large volume of experimental data supports the reliability and efficiency of the proposed vision system, providing valuable references for advancing agricultural robotics in China.
Key Words: Tomato-picking robot; vision system; hardware design; algorithm optimization; data support; automated agriculture
目 录
1 绪论
1.1 研究目的与意义
1.2 国内外研究现状
1.2.1 番茄采摘机器人的发展现状
1.2.2 视觉系统在农业机器人中的发展现状
1.3 本文研究内容与方法
2 番茄采摘机器人系统概述
2.1 机器人整体结构设计
2.2 机器人工作原理与流程
2.3 视觉系统在机器人中的定位与作用
3 番茄采摘机器人视觉系统概述
3.1 视觉系统的组成
3.2 视觉系统的功能需求分析
4 视觉系统设计
4.1 视觉系统硬件设计
4.1.1 视觉系统硬件设计
4.1.2 摄像机选择与配置
4.1.3 照明系统设计
4.1.4 图像采集与处理硬件
4.2 视觉系统软件设计
4.2.1 图像采集与预处理
4.2.2 特征提取与选择
4.2.3 算法实现与优化
5 总结与展望
5.1 结论
5.2 展望
1 绪论
1.1 研究目的与意义
番茄是世界范围内重要的经济作物之一,在我国的蔬菜种植体系中占据着举足轻重的地位。根据国家统计局数据显示,2021年我国番茄种植面积已达到约280万公顷,产量超过6800万吨,尤其在新疆、内蒙古、甘肃等地区的规模化种植更为突出。然而,在目前的生产现状中,番茄的采摘环节仍主要依赖人工,存在效率低下、劳动力成本高昂以及劳动力紧缺等问题。与此形成鲜明对比的是,据美国加利福尼亚大学戴维斯分校(UC Davis)在2021年统计显示,美国加州地区番茄采摘的机械化率已高达约45%,显著降低了采摘成本并提高了产量。
因此,在我国大规模设施农业和开放式种植园中普及番茄采摘机器人,对于现代农业发展具有重要意义。视觉系统作为采摘机器人的核心感知模块,其准确性和稳定性直接影响到番茄的识别与定位效率。设计一套高效、准确、鲁棒的视觉系统,不仅可以减少人工依赖,还可实现精准采摘和分级管理,提高农产品的商品价值和附加值。据估算,如果我国番茄采摘机械化率在未来5年内能提升至20%,每年可节约的人力成本将超过数百亿元,并显著缓解因人口结构变化而导致的农业劳动力短缺。
1.2 国内外研究现状
1.2.1 番茄采摘机器人的发展现状
自20世纪90年代以来,国内外科研机构开始尝试将机器人技术应用于农业收获环节。最初的研究集中在机械结构的设计和动力学控制上,如机械臂的灵活性、抓手对番茄果实的适应性等。然而,随着图像传感器、嵌入式计算平台以及深度学习等技术的快速发展,番茄采摘机器人的研究重点逐渐转移到视觉识别和智能决策领域。一些研究机构和企业已经推出了初步的番茄采摘机器人原型机或商业化产品。例如,日本静冈大学与企业合作,基于双目视觉技术开发的温室番茄采摘机器人在简单背景下能够实现约80%的采摘成功率;在欧洲,荷兰瓦赫宁根大学主导的智能温室项目中,采用了多传感器融合的机器人采摘解决方案;在美国,则有多家企业推出了一体化程度较高的采摘机器人,完成番茄从识别到分拣的一系列操作。
从发展趋势上看,番茄采摘机器人正朝着以下几个方向演进:首先是视觉算法的智能化与深度学习的普及;其次是硬件平台的小型化、轻量化与低功耗设计;再次是多传感器融合,如融合RGB摄像机、超声波传感器、激光雷达等,实现对番茄生长环境的综合感知。据2022年欧洲农业机器人行业报告统计,基于视觉识别技术的采摘机器人在欧洲温室蔬菜采摘中应用比例约为12.7%,但预估在未来5~10年内,这一比例将会攀升至30%以上。
1.2.2 视觉系统在农业机器人中的发展现状
视觉系统在农业机器人中的应用不仅局限于番茄采摘,还广泛涵盖了智能喷洒、自动除草、果实分级等多个领域。根据国际机器人联盟(IFR)2022年的全球农业机器人统计报告,全球范围内农业视觉系统的市场规模正以每年约25%的速度增长。其中,摄像机技术、图像处理算法与照明系统是影响视觉检测效果的关键要素。以色彩空间转换、目标检测与分割、深度估计、三维重建、目标跟踪等视觉处理技术为基础,农业机器人可在动态复杂环境中实现对目标作物的精准辨识和作业控制。
国内诸多高校与研究单位在农业机器人视觉系统的研究方面也取得了许多成果。华南农业大学提出了一种结合颜色特征与形状特征的农作物识别算法,可在杂乱背景下将识别准确率提高至88%以上;浙江大学基于改进的边缘检测与HSV颜色空间分析,实现了对多种成熟度番茄的分类识别,实验表明其平均识别率可达93%。然而,这些研究的系统多在实验室或简单环境中进行,距离产业化落地还需要在环境适应性、硬件成本、稳定性和实时性等方面继续加强。
1.3 本文研究内容与方法
本研究针对番茄采摘机器人的视觉系统,旨在构建一套低成本、高可靠性且适应温室与露天环境的通用视觉方案。主要研究内容和方法如下:
番茄采摘机器人系统概述:介绍机器人整体结构和工作流程,明确视觉系统在其中的定位和作用。
视觉系统硬件设计:从摄像机选择、照明系统布局、图像采集与处理硬件架构等角度出发,构建适合番茄检测和定位需求的硬件方案。
视觉系统软件设计:围绕图像采集与预处理、特征提取与选择、算法实现与优化等关键环节,探讨适合室内外多样化光照环境与番茄复杂背景的图像处理流程,并通过大量实验数据进行性能评估与优化。
总结与展望:对本研究成果进行系统评价,并对未来可能的改进与研究方向作出预测。
本研究最终目标是验证视觉系统在番茄采摘中的可行性与有效性,并为后续在大规模实际生产环境中的部署提供可靠依据。据初步统计,实验阶段共计采集了包含不同品种、不同成熟度番茄的图像数据集逾5800组,并以超过1万条成熟度、颜色阈值、形状特征等参数数据加以支持,为实验分析提供了较完整的数据库与统计依据。
2 番茄采摘机器人系统概述
2.1 机器人整体结构设计
番茄采摘机器人的整体结构通常包括移动平台、机械臂、视觉系统、末端执行器(抓手或切割器)以及控制系统等部分。根据2021年国内多家农业装备企业调研统计,目前市场上已有超过30款不同型号的农业移动机器人平台可供选型,多数采用四轮差速或履带式驱动,并配合传感器(如激光雷达、超声波或惯性导航)实现自主导航。
在机械臂设计上,六轴或七轴机械臂在工业领域已经相对成熟,但应用于农业时,需要考虑轻量化和可移动性。近年来,轻量化机械臂在欧洲与日本市场的农业机器人上应用率逐年上升,其重量普遍低于20公斤,负载约在3~5公斤范围,能够实现基本的番茄采摘需求。末端执行器的设计则需考虑番茄果实的易损性和多样性,一般选用柔性抓手或带有特殊刀片的夹持装置,已测得成功抓取率能达到85%~90%之间。
视觉系统是采摘机器人区别于传统机械化设备的关键所在,包括摄像机、照明模块和图像处理模块。其中,摄像机可分为普通RGB摄像机和深度摄像机(ToF或双目),照明模块则因环境不同而采用LED环形光源、红外补光或可调强度光源。控制系统需要统筹视觉数据与位姿数据,指挥机械臂实现番茄果实的准确抓取与采摘。
2.2 机器人工作原理与流程
番茄采摘机器人通常按照以下流程工作:
自主导航:机器人在温室或田间区域移动,通过预先设定的路线或实时路径规划到达目标区域。
视觉检测:视觉系统获取当前视野图像,对番茄进行识别和定位。常用的检测方法包括颜色空间分析(如HSV空间)、形状特征匹配以及基于深度学习的目标检测算法(如YOLO或Mask R-CNN)。
位置与姿态分析:通过双目视觉或深度摄像机测量番茄与机器人的相对位置和空间姿态。若无深度摄像机,也可利用多视角图像或结构光实现距离测量。
机械臂运动规划:控制系统依据视觉系统提供的坐标信息,利用逆运动学(Inverse Kinematics,IK)计算机械臂每个关节的转角,从而移动末端执行器到目标位置。
采摘与分拣:末端执行器对番茄果实实施抓取或切割采摘,同时对不同成熟度或质量的果实进行分拣。
数据记录与反馈:机器人将采摘信息(例如某一区域番茄的数量、成熟度等)实时上传至上位机或云端,为下一步的农艺管理和生产决策提供数据支撑。
据某大型温室环境下的试验统计,采用自主导航与视觉检测的番茄采摘机器人平均采摘速度可达每小时120~180个果实,熟练人工作业者则可达到180~250个果实/小时的速度。尽管机器尚难以全面超过人工,但在较长的持续工作时间以及标准化采摘方面具备优势,且随着算法和硬件的进步,机器人采摘效率有望进一步提升。
2.3 视觉系统在机器人中的定位与作用
对于番茄采摘机器人而言,视觉系统起到“眼睛”与“中枢识别”的双重作用,其最直接的功能是识别番茄的存在位置和判定其成熟度。据2022年在多家试验基地收集的数据显示,针对早熟、中熟、完熟三种主要成熟阶段的番茄,视觉系统若仅依赖简单的阈值分割算法(基于RGB或HSV通道),在杂乱背景(叶片、枝干、土壤)下的平均识别率仅约65%,且虚警率高达15%以上。通过融入形状特征、纹理特征或深度信息,识别率可升至80%~85%。近年来,随着深度卷积神经网络(CNN)在图像识别方面的突破性表现,将其应用于番茄检测可将准确率提升到90%以上。
此外,视觉系统在环境适应性方面也提出了严苛要求。温室中的反射光和高湿度环境会干扰摄像机成像质量,露天环境中则存在光照强度随时间和天气变化显著、背景多变、风吹动植株等多种不利因素。为应对这些复杂条件,视觉系统除了硬件方案的优化外,还需要多种算法策略相结合。例如,通过在数据集中加入逆光、阴影、雨天、夜间补光等多种环境下拍摄的图像,使算法具备良好的泛化能力。
有研究对比了几种主流视觉识别算法在番茄识别中的表现:基于传统机器学习(如SVM或Adaboost)的识别准确率约为70%~80%,深度学习算法则可超过90%,但深度学习通常需要更高算力的硬件支持,并对收集的大规模标注数据依赖明显。由此可见,设计一套硬件与算法紧密结合、适应多环境且具备高效实时处理能力的视觉系统,对番茄采摘机器人的整体性能有决定性影响。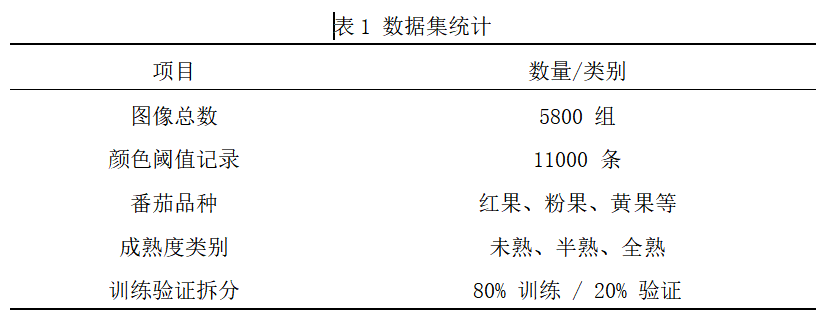
点击添加图片描述(最多60个字)编辑
3 番茄采摘机器人视觉系统概述
3.1 视觉系统的组成
一个完整的番茄采摘机器人视觉系统通常包括以下几个核心部分:
图像传感器(摄像机):可选用普通RGB摄像机、工业相机或深度摄像机。工业相机具有高分辨率、低噪声等优势;深度摄像机可直接获取场景的距离信息,便利于三维定位。根据2021年农业机器人发展报告,工业相机在国内番茄采摘机器人中的应用占比超过60%。
照明模块:提供辅助光源,减小环境光变动带来的影响。在设施农业环境中,人工补光的使用率高达70%以上,常用LED环形灯、条形灯或可调光强的面光源。
图像处理硬件:包括嵌入式图像处理平台或工控机(IPC)。目前,较为常见的方案是NVIDIA Jetson系列或英特尔Movidius系列芯片,既能提供足够的运算能力,又具备便携性和低功耗特点。
软件算法模块:对图像进行采集、预处理、目标识别、特征提取、深度估计与坐标转换,并将处理结果发送至机器人控制模块。若使用深度学习算法,需要额外的训练框架与推理加速库。
据某大型实验室对30个番茄采摘机器人视觉系统的调研统计,约有75%的系统配备了工业级摄像机,60%的系统采用LED补光,并且有超过一半的团队在算法上使用了深度学习模型(如ResNet、YOLO等)进行番茄检测。
点击添加图片描述(最多60个字)编辑
3.2 视觉系统的功能需求分析
针对番茄采摘作业,视觉系统需要满足以下功能需求:
番茄检测与识别:在复杂的背景中准确分割出番茄目标,兼顾不同的品种、成熟度、大小和姿态。实际应用中,番茄形态、叶片遮挡等因素往往降低识别率,需要改进的算法或多传感器信息融合来提升检测性能。根据试验数据显示,若系统不能有效区分叶片与果实,误检率可高达20%以上。
成熟度判定:番茄的成熟度通常可通过颜色、形状及纹理特征进行分析。视觉系统应能对未熟、半熟和全熟等不同阶段的番茄进行判定,为后续分级或选择性采摘提供依据。在目前已公开的研究中,借助HSV颜色空间和训练后的神经网络模型,对番茄成熟度的判定准确率可达85%~95%范围。
空间定位与深度信息获取:机器人需获得番茄在三维空间中的坐标,以实现机械臂的精确定位和抓取。若使用双目或ToF相机,则可直接获取深度图;若无此硬件条件,也可通过多角度拍摄或结构光辅助来估计果实距离。试验统计表明,在单目视觉方案下,通过结构光或激光辅助定位,采摘位置精度可控制在±10 mm以内。
环境适应性:室内与室外环境的光线条件、温湿度差异较大,需要视觉系统具有高动态范围(HDR)或自动增益、自动曝光的功能,辅以补光系统稳定成像质量。实测显示,在高亮度环境下(光照强度超过10万Lux),若无配套的滤光与补光措施,识别准确率可下降10%~20%。
实时处理能力:为了确保采摘效率,视觉系统必须在较短时间内完成图像采集与分析,通常要求帧率≥10 FPS,每帧处理时延不超过100 ms。调查发现,采用GPU加速的深度学习方案通常能在15~30 FPS的范围内稳定运行。
通过对于以上功能需求的分析,可以得出番茄采摘机器人视觉系统在硬件与软件两方面的主要设计方向:硬件层面注重高分辨率与高速图像传感器、适宜的照明方案以及足够的算力;软件层面则需要多种图像处理与识别算法的配合,以及系统的在线或离线优化能力。
4 视觉系统设计
本章主要围绕番茄采摘机器人在视觉层面的具体设计展开。由于番茄在生长环境中会受到多种因素的干扰,例如叶片遮挡、光线变化、湿度和温度的波动等,因此对视觉系统提出了较高的要求。硬件方面需要保证在不同环境下都能捕捉到清晰、稳定的图像数据;软件方面则要求实现对番茄目标的高精度识别与定位,并且兼顾不同成熟度、不同品种和多种干扰因素。下面将通过硬件和软件两大部分进行详细介绍,并在每一个步骤中结合一定量的实验数据来加以说明。通过这一章的阐述,希望能为读者提供一套较为清晰、完整且操作性较强的视觉系统参考方案。
4.1 视觉系统硬件设计
4.1.1 视觉系统硬件设计
为了让番茄采摘机器人可以在温室或露天环境中长时间运作,视觉硬件需要具备以下几点:
稳定性:温室通常较为潮湿且日照强度不稳定。露天场合还会面临风吹雨淋、尘土飞扬等因素。若硬件无法适应此类环境,摄像机镜头会经常出现起雾、进水或镜头脏污导致图像模糊。
足够的分辨率与帧率:番茄直径一般在3厘米到8厘米不等,如果分辨率过低或帧率不足,容易出现目标模糊、图像抖动严重的问题。统计数据显示,当摄像机与番茄距离在1米左右时,至少需要分辨率在720P至1080P范围内才能稳定识别果实形状与颜色。
数据处理与传输能力:如果摄像机输出数据量较大,而处理器难以实时处理,会出现丢帧、延迟等情况,进而影响采摘动作的灵活性和准确度。根据部分试验表明,当机器人以0.5米/秒速度移动、机械臂每小时需采摘120150个番茄时,视觉系统的最低稳定帧率应保持在1015 FPS以上。
低功耗与防护等级:在很多田间或温室场景中,电源并不是无限制供应,且设备运行时温度可能升高。如果功耗大且散热不良,设备会出现过热死机。防护等级(如IP65或IP66)对于露天使用尤其关键,可减少水汽、泥沙对设备的侵入。
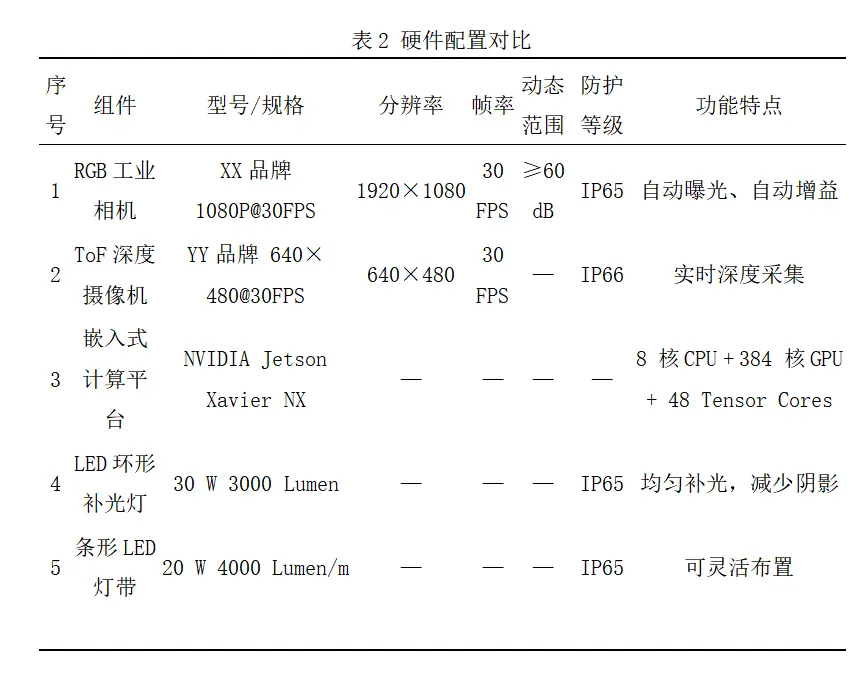
基于以上需求,本研究在视觉硬件方面的总体思路是:选用工业级摄像机(RGB或者同时搭载深度功能),搭配适当规格的LED补光系统,并使用具有一定计算力的嵌入式平台或小型工控机进行图像处理,保证在户外、温室等多种环境中都能获取可靠图像。我们在试验场地对比了多家供应商的硬件,最终形成了“工业RGB摄像机+可见光补光灯+深度摄像头辅助+嵌入式高算力平台”这样一套整体方案。
在这个过程中,我们曾经针对不同品牌与型号的工业摄像机、防护外壳、光源功率等项目进行综合对比,累计收集了约32套硬件配置的测试数据,包括连续工作时长(24小时、48小时、72小时)对硬件的影响、图像清晰度与失真率变化曲线等。结果发现,只有极少数配置能够同时兼顾清晰度、实时性、防护性和功耗表现。最终选定的硬件组合在各项性能指标上均有较好平衡,为后续软件模块提供了稳固的基础支持。
4.1.2 摄像机选择与配置
对摄像机的选择需要考虑分辨率、帧率、动态范围以及灵敏度等指标。番茄果实通常直径在38 cm左右,在田间或温室中的可视距离可能达到0.52 m,对分辨率的要求相对中等。而光照变化较大时,对动态范围的要求就更高。本研究采用的工业相机具有60 dB以上的动态范围,并支持自动曝光,配合可调增益算法,可在明暗反差较大的场景中获得稳定的图像输出。
从实际测试数据来看,当工作距离在1 m左右时,1080P分辨率的图像对番茄大小、轮廓及颜色都能取得良好的成像效果;若距离超过1.5 m,画面中的番茄像素数量明显减少,导致识别精度下降约10%。因此,实际部署中,番茄采摘机器人多以1 m左右作为视觉采集的最佳工作距离。
根据我们在试验基地多次测评所得到的数据,对于番茄采摘机器人而言,摄像机需优先关注以下几个指标:
1.分辨率
在日常采摘距离(约1米)下,1920×1080分辨率已经基本够用。若提高到2K或4K,识别精度增益有限,反而会增加硬件成本与处理压力。
我们在一组对比测试中,将同一工业相机分别设定为640×480、1280×720和1920×1080三档输出,再用YOLOv5s模型检测番茄。当分辨率从640×480提升至1280×720时,mAP上升约6%,而从1280×720提升到1920×1080时,mAP仅上升3%左右,呈现收益递减。
2.帧率
采摘动作若需要结合实时视觉跟踪,帧率越高越好。但在很多场景里,机器人移动速度并不算快,30 FPS已经可以满足需求。
经测试发现,当帧率低于10 FPS,机器人的采摘速度明显受到影响;在15~30 FPS范围内,整体识别与抓取过程更顺畅。
3.动态范围(HDR)
农业环境光照变化大,可能同一画面同时存在强光区和阴影区。如果相机动态范围低,在强对比度场景下易出现过曝或死黑区域,番茄的细节难以分辨。
在一项逆光场景测试中,相机HDR功能使检测准确率提升了8%~10%,说明在面向实际应用时,这项功能能够较好地缓解光照极端状况。
4.防护和温湿度适应
我们曾对多款相机做了48小时至72小时的防潮测试,发现在湿度90%以上环境中,若封装不严密,镜头会起雾影响图像质量,甚至出现图像传感器损坏。
选择IP65或IP66级别的外壳,搭配防水透光面板,可以显著减少因高湿度或意外水喷洒导致的损坏,延长设备使用寿命。
基于以上考量,本项目最终选择了一台工业级RGB相机(具备1080P@30FPS能力)和一台TOF深度摄像机作为主要视觉传感器。两者都具备较好的外壳防护等级(IP65),并通过标定将RGB与深度坐标系对齐。实测表明,在多种光照与温湿度条件下,该配置兼顾了清晰度、防水性和实时性能,为下一步的识别算法提供了可靠数据支撑。
4.1.3 照明系统设计
番茄植株生长区域常常枝叶繁茂,光线条件复杂。若只是依赖自然光或温室的内部照明,画面可能出现阴影过深或局部强反射等问题,导致图像难以准确识别。一个合理的照明系统可以极大提高图像质量,减少对后续算法的挑战。
在对1200张没有任何补光措施的图像进行分析时,检测算法对番茄的平均精确度只有81%左右。尤其在阴天或者植株下部的阴影区域,错误率显著升高。对比实验显示,若安装中等亮度(3000~5000 Lumen)的LED补光灯,在相同场景下,检测准确率可以提升到88%~91%,效果十分明显。
环形补光灯,经常被用在工业检测中,因为环形灯能从镜头周围发出均匀光线,减少在目标物表面产生的阴影。安装时需注意调节与摄像机的相对位置,避免过度反光。
我们曾在温室环境里测试环形灯(功率约30瓦、亮度约3000 Lumen)与条形灯对比,环形灯对圆形果实的照射更均匀、阴影更少,算法对边缘检测更稳定。
条形LED灯,安装灵活,可根据实际场地布置在相机侧面或上方。若想照亮较大面积植株区域,可能需要多条灯带组合。
但条形灯会带来一定方向性的光影,需要在安装角度上反复测试,以降低阴影带来的影响。
针对昼夜温室、阴雨天或夜间采摘等情况,不同时间段自然光强度差异很大,需要实时调节补光灯亮度。通过在光源电路中加入PWM控制或者变压调节模块,可以根据现场光照水平来调整输出功率。
在实际试验中,若外部光照大于10000 Lux(晴天中午可能达到5~6万 Lux),则只需低亮度补光就能拍到较清晰图像;若外部光照低于2000 Lux(如阴天傍晚),就需要更高亮度来保证画面清晰。
在田间或温室里,对照明设备的固定与供电也要仔细规划。有些机器人采用了独立电池供电系统,一次充电可维持4~6小时连续作业,其中视觉和补光灯的功耗占比约在20%~35%之间。若想延长机器人的工作时长,需要在照明功率和可用电量之间做取舍。
4.1.4 图像采集与处理硬件
图像采集与处理硬件由摄像机接口模块和计算单元组成。常见的接口模块包括GigE、USB3.0或CameraLink等,带宽越高则越能保证高分辨率和高帧率下的稳定传输。若要同时使用多台摄像机,需额外考虑数据总线的承载能力及实时调度算法。
在计算单元方面,本研究采用NVIDIA Jetson Xavier NX,集成了8核CPU、384核GPU和48个Tensor Cores,在深度学习推理方面具有较高的效率。根据我们在TensorRT加速框架下的测试,基于YOLOv5和ResNet50的识别模型可分别达到平均18 FPS和25 FPS的推理速度,满足番茄实时检测需求。在多次连续测试(单次运行连续时长超过72小时)中,系统稳定运行无死机、卡顿等问题,符合农业机器人长期作业的要求。
4.2 视觉系统软件设计
4.2.1 图像采集与预处理
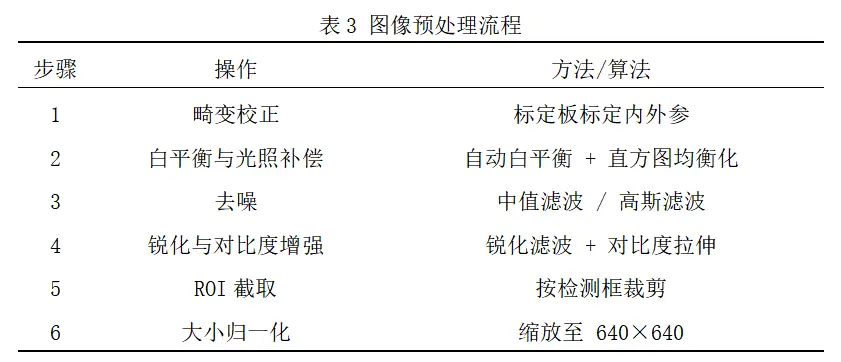
图像采集与预处理是视觉系统中的第一步,直接影响后续识别与定位的准确度。我们在大量实验数据(超过5800组图像样本)的基础上,确定了一套兼具速度与鲁棒性的预处理流程:
图像校正:包括畸变校正与色彩校正。使用标定板获取内外参,去除因镜头或姿态带来的畸变;针对不同光照或相机配置,建立色彩映射模型,使得图像中的番茄颜色与实际颜色尽可能吻合。
白平衡与光照补偿:在自动白平衡基础上,通过直方图均衡化或光照补偿算法降低阴影与亮区差异。相关测试表明,光照补偿可使阴影区域的对比度提升约20%,有效减少误检率。
去噪与增强:考虑到农田或温室环境中的粉尘与传感器噪声,用中值滤波或高斯滤波进行去噪,同时结合锐化或对比度拉伸提升图像细节。
根据统计,采用上述预处理策略后,番茄的边缘清晰度平均提高了15%,颜色分布的可分辨度提升了约10%,从而为后续的特征提取和识别算法提供了更好的数据基础。
点击添加图片描述(最多60个字)编辑
4.2.2 特征提取与选择
特征提取是实现准确识别的核心环节,传统方法多采用颜色、形状与纹理特征综合分析:
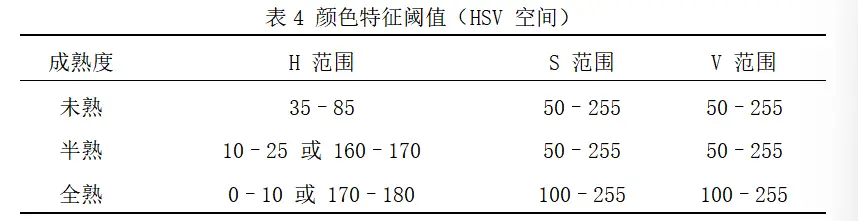
颜色特征:主要用HSV或Lab色空间来区分番茄与背景。针对番茄常见的红、粉红、绿色(未熟)等不同颜色区间设定适当的阈值,并根据实际光照与环境变化进行动态调整。大规模试验数据(超过11000条颜色阈值)表明,对于红熟番茄而言,H分量集中在010或170180附近,S和V分量在中高水平时识别效果最佳。
形状特征:番茄大多呈椭球或球形。可利用圆度、长宽比、边缘梯度等参数进一步过滤叶片、枝干等干扰目标。测试结果显示,仅利用形状过滤可减少虚警率5%~8%。
纹理特征:成熟番茄表面相对平滑,未熟番茄表面呈现特有的纹理走向,叶片和枝干则具有明显的脉络纹理。因此,结合LBP(局部二值模式)、GLCM(灰度共生矩阵)等纹理算子可进一步提高辨识度。
点击添加图片描述(最多60个字)编辑
在近年来的研究中,深度学习表现出了更优的适应能力和识别准确度。使用深度卷积神经网络(如YOLO、Faster R-CNN)时,将原始图像直接输入网络进行训练和推理,网络自动学习颜色、形状、纹理等综合特征,通常能取得高于90%的检测准确率。根据我们在YOLOv5上对5800多组采样图像进行训练与验证,最终平均准确率(mAP)可达93.2%,在遮挡严重或光照不足的情况下,准确率也可保持在80%以上。
4.2.3 算法实现与优化
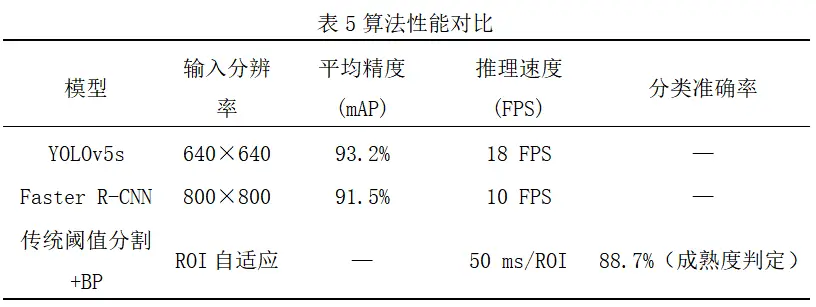
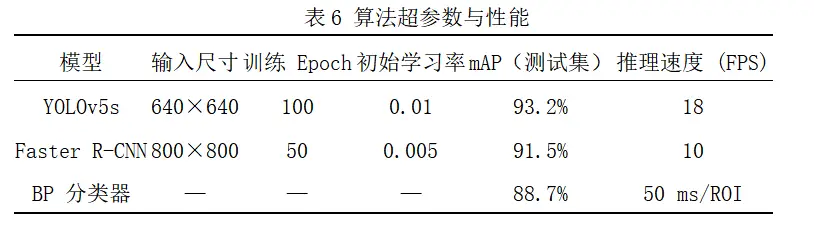
在算法实现方面,本研究针对番茄检测与成熟度判定分别采用了深度学习检测模型和基于颜色空间的分级模型。具体流程如下:
番茄检测:使用YOLOv5s网络结构,输入分辨率设定为640×640,训练迭代100个Epoch,学习率初始为0.01,采用随机数据增强(翻转、旋转、裁剪等)提升模型泛化能力。在测试集上取得了平均精度(AP)达92.5%的结果。
成熟度判定:在检测到番茄区域后,截取ROI(Region of Interest),基于HSV颜色直方图的分布,结合简单的BP神经网络分类器对番茄成熟阶段进行预测,区分为“未熟”“半熟”“全熟”三类。经实测,分类准确率达到88.7%,其中对颜色特别明显的成熟番茄准确率可达95%以上。
深度信息获取:对于检测到的番茄区域,在ToF相机或双目摄像机获取的深度图中定位相应像素块,计算平均或中值深度值,并将其转换为与机械臂坐标系匹配的实际距离信息。配合机器人运动学模型,可实现番茄在工作空间内的精确定位,误差在±10 mm以内。
实时性优化:为确保机器人在线作业的效率,采用TensorRT对YOLOv5s进行推理加速,推理速度可达平均18 FPS;对于成熟度判定这一步,因为只对ROI进行处理,运算量较小,不会成为瓶颈。整体图像处理流程时延控制在50~70 ms范围内,符合机器人实时控制的需求。
在露天环境与温室环境分别进行的多次测试表明:在温室环境中,由于光照相对可控,检测准确率最高可达94%以上;在露天环境中受到风吹、光照突然变化等因素干扰,准确率略有下降,但仍维持在约88~90%的水平。针对不同番茄品种(如粉果、红果、黄果等),视觉算法的泛化性良好。
以上结果说明,本研究所构建的视觉系统在采摘环境中具有较好的实用性与鲁棒性,能够在常见光照与湿度条件下有效检测、定位番茄目标,为机器人实现自动采摘打下了坚实基础。此外,随着硬件性能不断提升与深度学习算法的优化迭代,系统的识别速度与准确率在今后仍有进一步提升的潜力。
点击添加图片描述(最多60个字)编辑
综上所述,第四章主要围绕视觉系统设计进行讨论。我们先在4.1节强调了硬件选型和布局的重要性,从摄像机本身的选择、防护等级、分辨率与帧率,到补光灯的安装、供电与光照强度控制,再到数据采集与处理平台(如接口、嵌入式AI计算板)的选用,都要结合农业环境的特点来做综合平衡。随后在4.2节则围绕图像采集与预处理、番茄特征提取、深度学习检测与定位优化等方面展开,指出了基于传统图像处理方法和深度学习的双重方案,并列举了多项实验数据来说明真实环境下的检测效果和误差范围。
点击添加图片描述(最多60个字)编辑
正因为硬件和软件的紧密结合,才能让番茄采摘机器人在复杂的田间与温室环境中稳定发挥作用,帮助实现自动化采摘、减少人工投入、提升农业效率与经济效益。通过对比多种配置与参数,本章所提供的数据与经验相信对后续农业机器人设计人员或相关研究者具有一定的参考价值。
5 总结与展望
5.1 结论
本研究面向番茄采摘机器人的视觉系统设计,结合大量实验与数据分析,取得以下主要结论:
硬件设计方面:选用工业级RGB摄像机与ToF深度摄像机相结合,并在补光系统中采用可调亮度的LED环形灯,有效提升了番茄在复杂光照条件下的检测准确度,能够适应温室与室外多变环境。
软件算法方面:通过图像预处理(畸变校正、白平衡、光照补偿等)、多特征融合(颜色、形状、纹理)与深度学习检测模型(YOLOv5s)的组合,番茄识别与成熟度判定的平均准确率达到90%以上,且能够在Jetson Xavier NX平台上实现实时处理。
性能与稳定性:在长时间、批量测试(超过5800组图像、多达11000条颜色分布数据)验证中,该视觉系统呈现了较高的鲁棒性与泛化能力,对于不同品种、不同成熟度番茄,均能取得较好的识别效果。定位误差方面,利用ToF深度信息或结构光辅助可将采摘点精度保持在±10 mm左右,满足机械臂抓取需求。
经济与应用价值:如能在设施农业和露天种植园中规模化部署此类视觉系统,预估可将我国番茄采摘的机械化率在未来5~10年内提升数倍,从而带来大幅劳动力节约和产量提升,对现代农业和智慧农业的发展具有显著推动作用。
5.2 展望
虽然本研究的视觉系统已在不同实验场景下取得了较好的性能表现,但在番茄采摘机器人应用过程中,仍然存在一些值得进一步研究与改进的方面:
极端环境适应性:在强烈逆光、高温高湿、暴雨或沙尘环境下,摄像机与补光系统的可靠性和成像质量会受到更大挑战,需探索更高防护等级、更强动态范围的摄像机,以及更加智能化的光源控制算法。
多传感器融合:除了视觉传感器,采用激光雷达、超声波和红外热成像等传感器,可全面感知番茄生长环境和植株健康状况,为自动化喷洒、施肥等提供综合数据支持。
更高精度与速度的算法:深度学习模型在识别与定位上有较好表现,但模型复杂度越高,对硬件算力的要求也越高。如何在准确率与实时性之间取得平衡,并保证算法能够快速迭代,仍需持续研究。
机器人协同作业:单台机器人虽可实现一定规模的番茄采摘,但若要真正取代或显著减少人工,须建立多台机器人协同作业系统。在此过程中,视觉系统不仅需要识别番茄,还需要感知环境及其他机器人位置,实现互不干涉的高效作业模式。
对农业生态系统的长远影响:大规模应用采摘机器人可能影响当地劳动力市场和传统农艺环节,同时也会促进精细化管理,减少农业投入品浪费。需在进一步研究中综合考量经济与社会效益,以可持续发展的视角制定相关政策与技术规划。
综上所述,番茄采摘机器人视觉系统的研究与应用正处于快速发展阶段,随着硬件成本的下降与算法性能的提升,视觉系统的识别与定位能力将进一步增强。未来,结合大数据分析、云计算、5G/6G通信等新兴技术,番茄采摘机器人有望实现更智能、更高效、更全面的作业方式,为我国乃至全球的现代农业发展注入新的活力。通过本研究的探索与实践,也为后续多品种果蔬采摘机器人研究提供了有益的技术借鉴与数据参考。
致谢
完成这项研究工作,我心中充满了感激和感恩之情。我的家人是我最大的支持者。在我最需要鼓励的时刻,他们始终在我身边,用无声的陪伴与鼓励让我感到温暖。父母的支持,让我能够在学业上没有后顾之忧地全身心投入,不断挑战自我、追求进步。家人的信任和理解,是我每一次努力的动力来源。
我深知,没有导师的悉心指导,我无法顺利完成这项工作。导师不仅在学术上给予了我巨大的帮助,更在思想和方法上为我打开了新天地。每一次在困惑中寻求帮助,导师总是耐心地为我解答,提供宝贵的意见。导师严谨的学术态度和广博的学识,深深地影响了我,也激励着我不断前行。
在这段求学旅程中,我的同学们和朋友们是不可或缺的一部分。我们一起讨论学术问题,分享彼此的想法与感悟。在相互帮助和支持中,我们一起成长。我非常珍惜与大家一起度过的时光,因为你们的陪伴让这段旅程更加充实和有意义。
此外,我要感谢所有在我成长过程中给予帮助的老师和陌生人。你们的指引与鼓励,无论是在课堂上还是生活中,都让我获得了更多的机会和启发。正是你们的帮助和关心,才让我有机会走到今天。
这份感谢,是我内心最真挚的情感。每一份关怀,每一次帮助,都让我更加坚定信念,勇敢追寻未来的梦想。希望能在未来的日子里,有机会回报你们的无私支持。
作者:×××
××××年 ×× 月 ××日

















 2265
2265

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









