






一:相机参数设置和计算
镜头参数:MF2808-10MP 靶面尺寸2/3'' ,视场角(对角×水平×垂直) 69.7×58.5×45.5
焦距:8mm,分辨率:1624×1240
1.1视场角的计算
图像分辨率越高,双目匹配的的精度越高,由匹配误差带来的测量误差越小。此外,焦距和图像分辨率影响相机的视场角度。
海康MV-CS020-10UC的像素尺寸是4.5*4.5μm
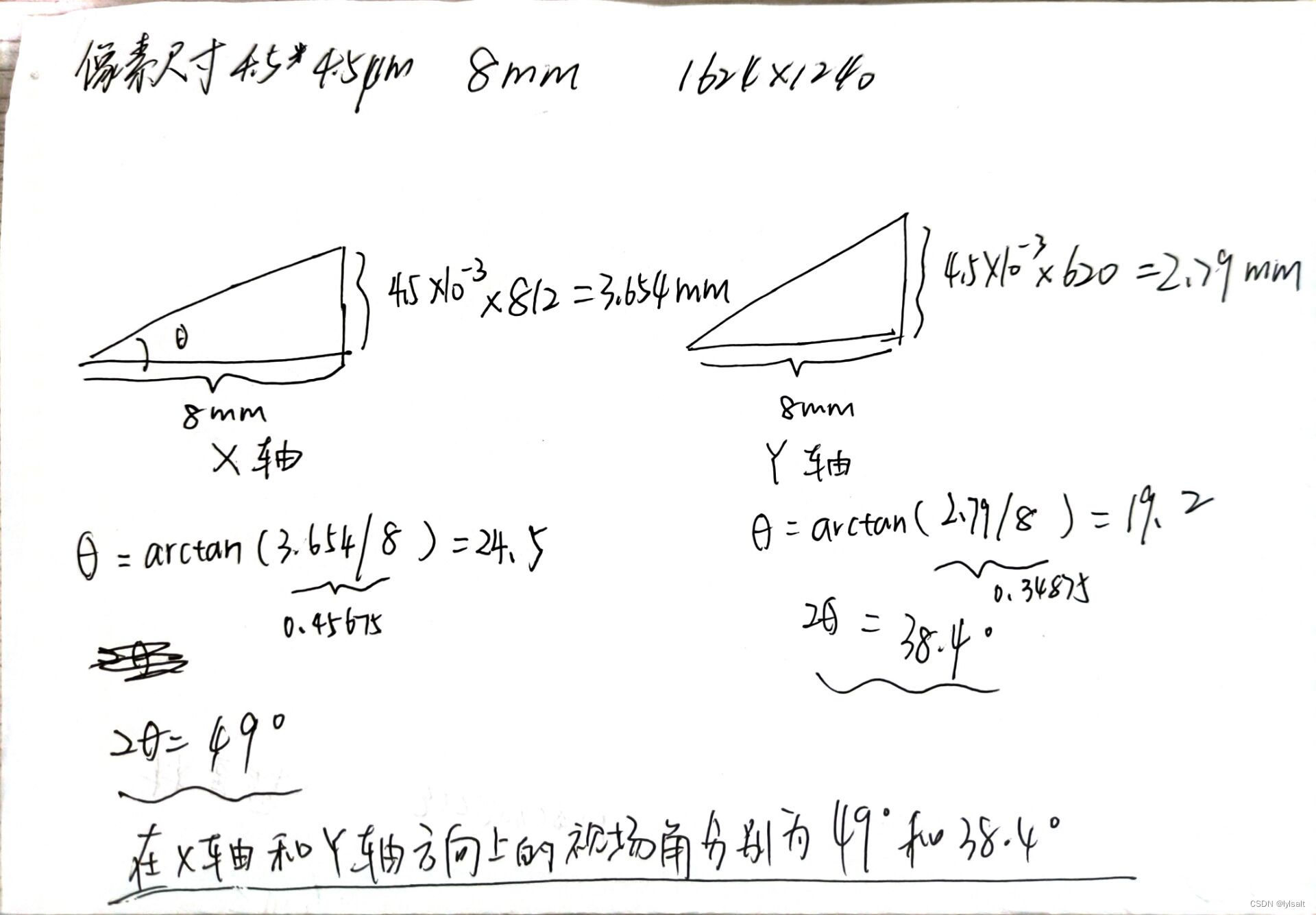
计算出来x轴的水平视场角是49度,y轴的垂直视场角是38.4度
1.2关于基线的选取
关于基线的选取:在12mm焦距,780mm双目基线长度的参数下,测量28m远的物体,一个像素的匹配误差带来的测量误差约为0.5m。具体计算方法如下:
双目测距的公式为:

关于雷达站的误差范围要求至少不能大于1.6m,再严格一些,不能大于0.8米。
中Z为深度,单位m;f为焦距,单位像素;b为双目基线长度,单位m;d为双目视差,单位像素;对于选用12mm镜头焦距的MER-230-168U3C相机,以像素为单位的焦距为:

在b=0.78m的双目基线下,Z=28m处的双目视差:
![]()
假设由于双目匹配引入了1个像素的匹配误差,此时d=56.6,则Z=28.5;由此可以得到在28m远的距离处,一个像素的匹配误差会带来0.5m的测量误差。
Tips:以上参数以及相关的计算方法和数据可以作为搭建双目测量系统时的参考。
1.3自己雷达基线的选取
8mm焦段,780mm双目基线长度的参数下,测量28米远和14米远的距离的测量误差的计算
需要学习的知识
1.相机的四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。
2.针孔相机模型
3.相机畸变
4.双目视觉的知识
5.立体匹配算法
6.相机位姿估计
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











