






基于扩展卡尔曼(ekf)非联合仿真的车辆状态参数估计,能够准确估计质心侧偏角和横摆角速度,采用的是传统的三自由度模型。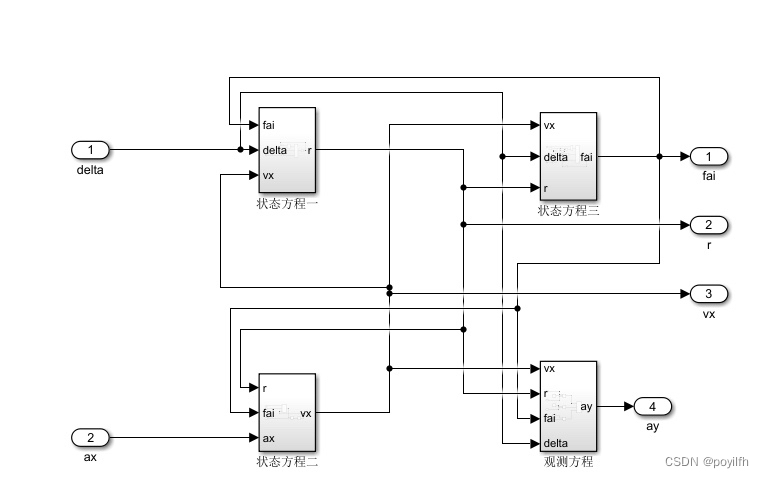
基于扩展卡尔曼(EKF)非联合仿真的车辆状态参数估计,是一种能够准确估计质心侧偏角和横摆角速度的方法,其核心理论就是三自由度模型。
三自由度模型是指在车辆运动学中仅考虑纵向运动(前进/后退)、横向运动(左右转弯)和车身侧滑运动(质心侧偏角)这三个自由度。这种模型可以简单地描述车辆的运动特性,并且易于建模和计算。因此,在车辆控制领域得到了广泛的应用。
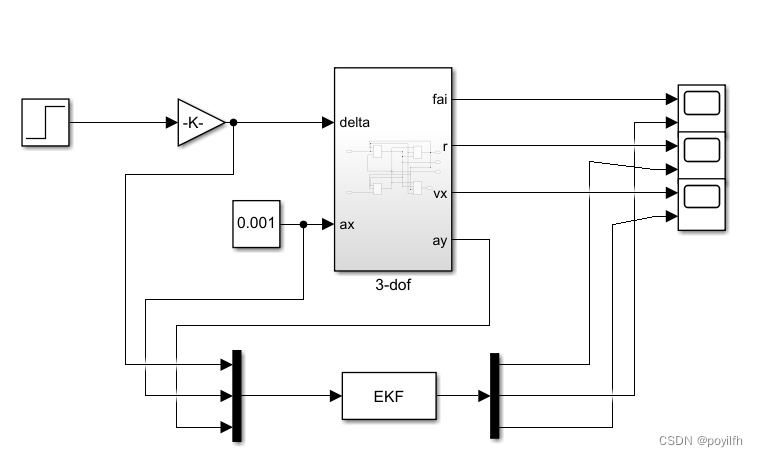
在基于EKF的非联合仿真中,主要分为两个过程:预测和更新。预测过程通过给定的车辆动力学方程,预测下一个时刻的车辆状态,包括车辆位置、速度和方向角等。更新过程则使用测量值(例如,传感器信号)来修正预测值,以提高状态估计的准确性。
在这个过程中,EKF是一种优秀的滤波算法,它可以处理非线性和高斯噪声的问题。同时,EKF还具备着递归性和最优性的特点,在车辆状态估计领域也有着广泛的应用。
基于EKF的非联合仿真在车辆状态估计中有着广泛的应用,具体来讲,它可以应用于车辆动力学控制、自动驾驶等领域,使车辆的运动更加准确、稳定和优化。此外,基于EKF的非联合仿真还可以帮助车辆制造商降低成本、提高安全性和可靠性。
总之,基于EKF的非联合仿真是一种十分优秀的车辆状态估计方法,它能够通过三自由度模型准确估计车辆的质心侧偏角和横摆角速度,并在车辆控制领域和自动驾驶技术中有着广泛的应用。
相关代码,程序地址:http://lanzouw.top/692064834848.html















 1741
1741











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









